本文主要是介绍【Paper】2014_A distributed event-triggered transmission strategy for sampled-data consensus of multi-,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Guo G, Ding L, Han Q L. A distributed event-triggered transmission strategy for sampled-data consensus of multi-agent systems[J]. Automatica, 2014, 50(5): 1489-1496.
Related: 【Paper】2020_Leader-following consensus for multi-agent systems subject to cyber attacks Dynamic even
文章目录
- 1. Introduction
- 2. A novel distributed event-triggered transmission strategy
- Ref
1. Introduction
2. A novel distributed event-triggered transmission strategy

For this purpose, we present the novel distributed event-triggered transmission strategy for the distributed multi-agent system, whose framework is illustrated in Fig. 1.
In this framework, whether or not sampled-data of agent i i i should be broadcasted at the sampling instant k h kh kh ( k ∈ N k \in \N k∈N ) depends on whenever its threshold is violated.
More specifically, it is assumed that the sampler is time-driven, the storer, the controller and the actuator with ZOH (zero-order hold) are all event-driven and all the sampled-data packets are transmitted with their time stamps.
The state of each agent i i i is sampled by a sampler at a constant sampling period h > 0 h > 0 h>0.
The sampled-data x i ( k h ) ( k ∈ N ) x_i(kh) (k \in \N ) xi(kh)(k∈N) of agent i i i can be successfully sent to its distributed event processor (DEP) embedding an event-triggered condition.
Here, the DEP’s execution of each agent i i i involves three tasks:
- (i) receiving the sampled-data from agent i i i and its storer at each sampling instant;
- (ii) processing the received sampled-data with respect to the event-triggered condition; and
- (iii) generating a trigger signal to the event trigger when a threshold is violated.
Once the event trigger receives a trigger signal, the sampled-data of agent i i i is authorized to be broadcasted to the storers of its own and its neighbors’.
It should be pointed out that the storer is employed to gather the sampled-data of agent i i i and its neighbors and to immediately update its information as soon as measuring new sampled-data from agent i i i and its neighbors.
Then, the controller of agent i updates its input by using the received sampled-data from the storer, which implies that the controller update of agent i i i is driven at both its own and neighbors’ event instants.
Then, the output of the controller of agent i i i is sent to the actuator with ZOH, where ZOH is used to keep the control input of agent i i i constant when no newest sampled-data from the controller of agent i i i arrives.
t m + 1 i h = t m i h + min l i ≥ 1 { l i h ∣ χ i T ( t m i h + l i h ) Φ χ i ( t m i h + l i h ) ≥ σ i y i T ( t m i h + l i h ) Φ y i ( t m i h + l i h ) } (3) \begin{aligned} t_{m+1}^i h = t_{m}^i h + \min_{l_i \ge 1} \left\{ l_i h ~|~ \chi^{\text{T}}_i (t_{m}^i h + l_i h) \varPhi \chi_i (t_{m}^i h + l_i h) \ge \sigma_i y^{\text{T}}_i (t_{m}^i h + l_i h) \varPhi y_i (t_{m}^i h + l_i h) \right\} \end{aligned} \tag{3} tm+1ih=tmih+li≥1min{lih ∣ χiT(tmih+lih)Φχi(tmih+lih)≥σiyiT(tmih+lih)Φyi(tmih+lih)}(3)
where
l i ∈ N \red{l_i} \in \N li∈N,
σ > 0 \red{\sigma} > 0 σ>0 is a threshold parameter,
Φ > 0 \red{\varPhi} > 0 Φ>0 is a weighting matrix,
χ i ( t m i h + l i h ) = x i ( t m i h + l i h ) − x i ( t m i h ) \red{\chi_i (t_{m}^i h + l_i h)} = x_i (t_{m}^i h + l_i h) - x_i (t_{m}^i h) χi(tmih+lih)=xi(tmih+lih)−xi(tmih) and
y i ( t m i h + l i h ) = ∑ j = 1 N w i j [ x i ( t m i h ) − x j ( t m j ′ j h ) ] \red{y_i (t_{m}^i h + l_i h)} = \sum^{N}_{j=1} w_{ij} [x_i(t_{m}^i h) - x_j (t_{m^\prime_j}^j h)] yi(tmih+lih)=∑j=1Nwij[xi(tmih)−xj(tmj′jh)] with
m j ′ ≜ arg min p { t m i + l i − t p j ∣ t m i + l i > t p j , p ∈ N } \red{m^\prime_j} \triangleq \argmin_p \left\{ t^i_m + l_i - t^j_p ~|~ t^i_m + l_i > t^j_p, ~ p \in \N \right\} mj′≜argminp{tmi+li−tpj ∣ tmi+li>tpj, p∈N}.
Apparently, one can see from (2) that, at the k k kth sampling instant, the event-triggered condition for agent i i i is closely related to the sampled-data error
χ i ( t m i h + l i h ) \chi_i(t^i_m h + l_i h) χi(tmih+lih) and the sampled-data
y i ( t m i h + l i h ) y_i(t^i_m h + l_i h) yi(tmih+lih) including the latest transmitted sampled-data
x i ( t m i h ) x_i(t^i_m h) xi(tmih) of agent i i i and the latest transmitted sampled-data
x j ( t m j ′ j h ) x_j(t^j_{m^\prime_j} h) xj(tmj′jh) of its neighbors.
Then, we propose the following new sampled-data consensus protocol
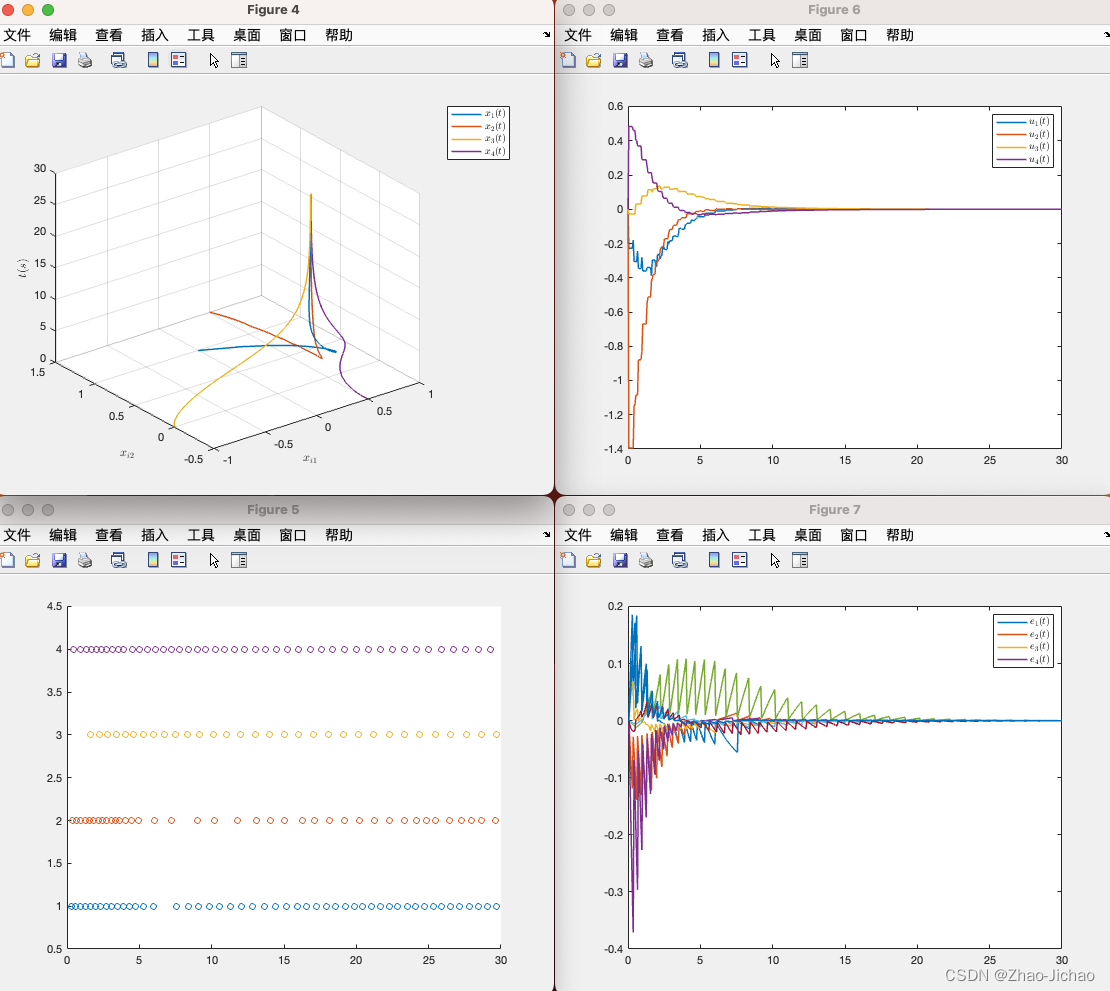
自己复现的带触发结果如下,对应程序 main_ET.m

Ref
这篇关于【Paper】2014_A distributed event-triggered transmission strategy for sampled-data consensus of multi-的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




