本文主要是介绍应用计算机软件matlab使用迭代法仿真激光谐振腔模式_经验论文:自动驾驶控制应用中基于搜索的测试...,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

摘要
仿真环境中的自动测试生成和评估是验证自动驾驶(AD)应用程序的一项关键技术。基于搜索的测试(SBT)是一种用于自动生成测试的方法,该方法利用一些优化方法从抽象测试描述中高效地生成具体的测试。在这篇文章中,我们成功地将 SBT 应用于具有不同特征的多个 AD 控制应用程序用例中,并报告了我们的观察结果。根据我们的经验,我们得出了许多教训,我们认为这些教训对于在工业环境中采用 SBT 方法和工具很重要。其中,最关键的教训是,SBT 会发现许多相关的错误,并向开发人员提供有价值的反馈,但需要特定工具来编写规范。
关键词
基于搜索的测试,自动驾驶,自动生成测试
1 引言
自动驾驶(AD)应用程序旨在承担驾驶员的驾驶责任。因此,这些系统具有很高的安全性和性能要求,这意味着它们不得对周围环境构成安全威胁,也不应阻碍周围的交通。这两个问题都要求在各种流量情况下对 AD 软件进行全面测试。为此,在模拟世界中进行虚拟化软件测试是一项关键技术,可在开发过程中获得快速反馈并支持系统的安全论据。模拟的环境的复杂性和要测试的方案的数量需要使用自动测试生成和评估技术。
通常,AD 应用程序具有功能块,这些功能块在概念上遵循如图 1a 所示的感知计划行为体系结构。在这种架构中,传感器例如基于照相机,激光雷达和惯性传感器来提供来自物理环境的(原始)信息。“Sense”组件将这些信息转换为车辆环境的模型。“计划”组件根据给定的当前环境决定要采取的机动措施,例如待在车道或变更车道上,然后由法案部分实现。“行为”组件通常包含几种(级联)反馈控制算法,这些算法控制车辆的执行器并与物理环境形成闭合回路。

(a)自动驾驶系统的高级架构
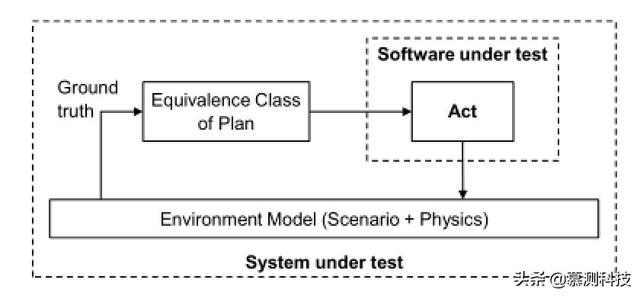
(b)Act 组件的仿真设置
这篇关于应用计算机软件matlab使用迭代法仿真激光谐振腔模式_经验论文:自动驾驶控制应用中基于搜索的测试...的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






