本文主要是介绍汇总!三维点云配准算法,包括4PCS、K-4PCS、SAC-IA、ICP、PCA、深度学习方法等,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

作者:PCIPG-Jing | 来源:3DCV, 投稿入口
添加微信:cv3d007,备注:三维点云,拉你入群。文末附行业细分群。
1 什么是点云配准
点云配准指的是输入两幅点云 Ps (source) 和 Pt (target),输出一个变换矩阵T(即旋转R和平移t)使得 T(Ps)和Pt的重合程度尽可能高。我们可以把点云想象成由无数个三维点组成的云彩,而点云配准就是要把这些云彩按照它们实际的位置和姿态拼接在一起,就像把多个拼图拼接在一起,最终形成一个完整的三维模型。粗配准(Coarse Registration)在两幅点云之间的变换完全未知的情况下进行较为粗糙的配准,目的主要是为精配准提供较好的变换初值。精配准(Fine Registration)精配准是给定一个初始变换,进一步优化得到更精确的变换。粗配准和精配准流程如下图所示: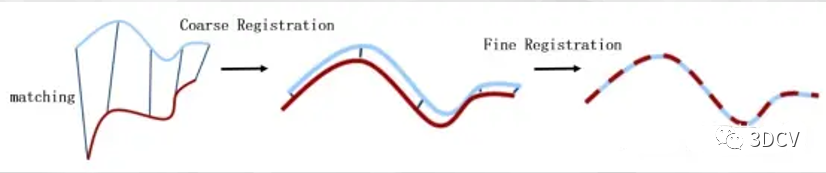
2 常见的配准算法
2
这篇关于汇总!三维点云配准算法,包括4PCS、K-4PCS、SAC-IA、ICP、PCA、深度学习方法等的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




