配准专题

三维激光扫描点云配准外业棋盘的布设与棋盘坐标测量
文章目录 一、棋盘标定板准备二、棋盘标定板布设三、棋盘标定板坐标测量 一、棋盘标定板准备 三维激光扫描棋盘是用来校准和校正激光扫描仪的重要工具,主要用于提高扫描精度。棋盘标定板通常具有以下特点: 高对比度图案:通常是黑白相间的棋盘格,便于识别。已知尺寸:每个格子的尺寸是已知的,可以用于计算比例和调整。平面标定:帮助校准相机和激光扫描仪之间的位置关系。 使用方法 扫描棋盘:

点云配准之ICP和NDT算法的高斯牛顿法求解
ICP算法 NDT算法 代码:https://github.com/taifyang/pointcloud-registration 参考:高翔《自动驾驶与机器人中的SLAM技术》

基于医学图像配准软件 ANTs(Advanced Normalization Tools)提取脑图像数值并与临床量表计算相关
前言: 神经影像学与临床评估的结合正在革新我们对神经精神疾病的理解。本博客聚焦于如何利用先进的医学图像配准软件ANTs(Advanced Normalization Tools)提取脑图像数值,并将其与临床量表进行相关性分析。 目录 一、准备掩模(Mask) 二、准备T-value map T-map 和 Z-map的转化 比较同一结果的T-map和Zmap 三、提取Mask

【学习记录】ICP类点云配准算法总结
〇、ICP 在点云配准或者激光SLAM领域,ICP类算法一直是一个比较经典的算法。研二时写的那篇综述也有过总结,对于激光SLAM而言,ICP类算法属于是scan-to-scan里面基于距离的一种配准算法。对于最纯粹的ICP算法,其基本思想就是用整帧点云,用一个初始的变换矩阵T进行投影,将当前帧点云投影到前一帧点云,之后利用kd-tree结构,利用距离这一指标筛选出一个最近点,计算投影点到所有最近

Open3d学习计划—高级篇 4(多视角点云配准)
本文为转载文章,原创作者为blue同学,可关注他的博客:https://blog.csdn.net/io569417668 Open3D是一个开源库,支持快速开发和处理3D数据。Open3D在c++和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。 本系列学习计划有Blue同学作为发起人,主要以Open3D官方网站的教程为主进行翻译与实践的学习计划

Open3d学习计划—高级篇 3(点云全局配准)
Open3D是一个开源库,支持快速开发和处理3D数据。Open3D在c++和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。 本系列学习计划有Blue同学作为发起人,主要以Open3D官方网站的教程为主进行翻译与实践的学习计划。点云PCL公众号作为免费的3D视觉,点云交流社区,期待有使用Open3D或者感兴趣的小伙伴能够加入我们的翻译计划,贡献免费交流

【C++PCL】点云处理稳健姿态估计配准
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的地方。 目录 1.原理介绍 2.代码效果 3.源码展示 4.

【细胞分割 + 图谱配准】论文综述
文章目录 一、细胞分割1.1、细胞分割:cellposeCellpose3: one-click image restoration for improved cellular segmentationCellpose 2.0: how to train your own modelCellpose: a generalist algorithm for cellular segmentat

论文阅读:H-ViT,一种用于医学图像配准的层级化ViT
来自CVPR的一篇文章,https://openaccess.thecvf.com/content/CVPR2024/papers/Ghahremani_H-ViT_A_Hierarchical_Vision_Transformer_for_Deformable_Image_Registration_CVPR_2024_paper.pdf 用CNN+Transformer混合模型做图像配准。可变

激光点云配准算法——Cofinet / GeoTransforme / MAC
激光点云配准算法——Cofinet / GeoTransformer / MAC GeoTransformer + MAC是当前最SOTA的点云匹配算法,在之前我用总结过视觉特征匹配的相关算法 视觉SLAM总结——SuperPoint / SuperGlue 本篇博客对Cofinet、GeoTransformer、MAC三篇论文进行简单总结 1. Cofinet Cofinet发表于2021
ArcMap处理地理配准后CAD图
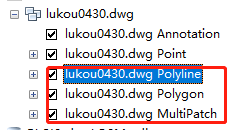
CAD进行地理配准后,要对其转换成shp,注解转换成点。 1、注解转换成点。 1)用ArcToolBox ->DataManagement Tools->Features->Feature to point。选中CAD中的注解图层,将其转换为点数据。 2.点、线、面等矢量数据导出。 选中加载的CAD的图层,右击Export Data即可。

基于SVD的点云配准
前言 为了更加深入透彻的理解点云配准,所以打算从头实现一次配准的过程,从关键点提取、特征提取、对应关系确定、SVD确定变换矩阵,一步一步完成。 首先介绍一下配准过程中用到的一些函数 1. ISS3D关键点提取 具体来说,它使用ISS(Intrinsic Shape Signatures)关键点检测算法在输入的点云数据中找到关键点

Python 点云快速全局配准算法
点云快速全局配准 一、概述1.1 定义1.2 函数讲解1.3 算法步骤 二、代码示例三、运行结果 一、概述 1.1 定义 基于特征匹配的快速全局配准算法(Fast Global Registration, FGR):通过计算源点云和目标点云的特征(如ORB、FPFH等特征),再使用特征匹配的方法实现点云之间的配准。 1.2 函数讲解 def registratio
Python 点对点的ICP配准算法
目录 一、算法概念二、代码示例三、结果示例 一、算法概念 点云ICP配准(Iterative Closest Point Registration)是一种将两个或多个点云数据集对齐的算法。其工作原理是通过迭代的方式,找出一个最优的刚体变换矩阵,将一个点云数据集的点对应到另一个点云数据集上的对应点,使得两个点云之间的误差最小化。 二、代码示例 import copy
图像配准方法之灰度信息法
版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/lliming2006/article/details/76268727
OpenCV中的模块:点云配准
点云配准是点云相关的经典应用之一。配准的目的是估计两个点云之间位姿关系从而完成两者对应点之间的对齐/对应,因而在英文中又叫“align”、“correspondence”。笔者曾经是基于OpenCV进行三维重建的,并且从事过基于深度学习的6DoF位置估计等工作。在这些工作中,除了重建点云外,还需要用构建真实数据集(包括点云和位姿等)以用于增强深度学习的泛化能力。当时是基于PCL完成
【ITK配准】第二十期 基于BSpline的图像变形
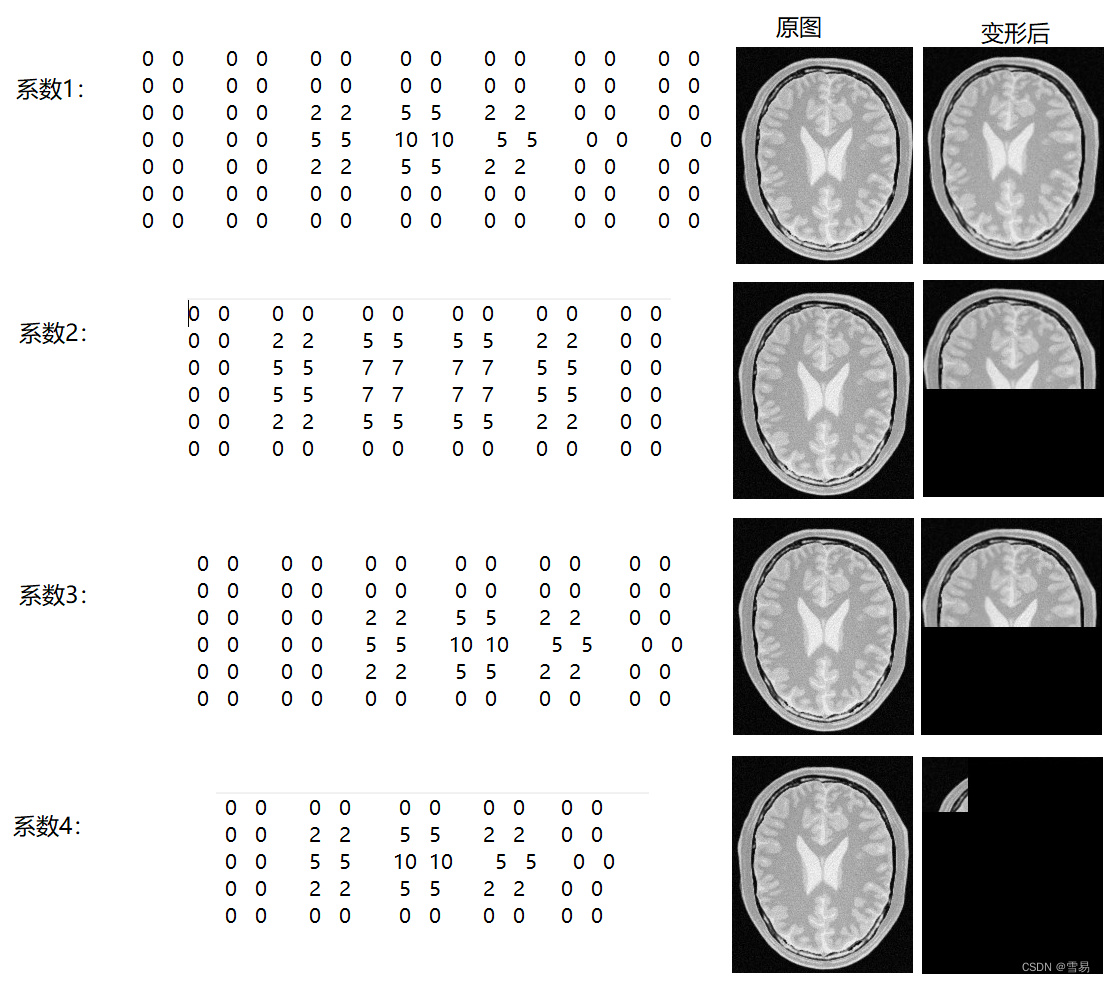
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK配准中的基于BSpline的图像变形样例,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动力(^U^)ノ~YO 基于BSpline的图像变形 样例:BSplineWarping1.cxx 该样
【ITK配准】第二十二期 Demons变形配准
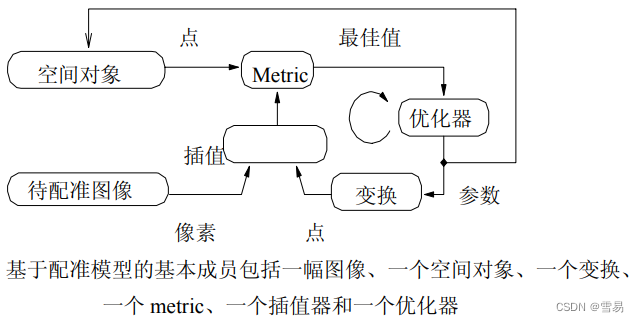
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK配准中的Demons变形配准,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动力(^U^)ノ~YO 基于配准的模型 这部分介绍配准一个图像的几何模型的概念。在这个方法里,首先创建一个带有大量参
【ITK配准】第十三期 FEM可变形配准样例
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK配准中的FEM可变形配准样例,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动力(^U^)ノ~YO FEM可变形配准 样例:DeformableRegistration1.cxx 该样例使用I
【ITK配准】第十一期 空间对象的模糊构建配准样例
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK配准中的空间对象的模糊构建配准样例,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动力(^U^)ノ~YO 空间对象的模糊构建配准 样例:ImageRegistration12.cxx 该样例介
【ITK配准】第八期 优化器(Optimizer)
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK中的优化器(Optimizer),希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动力(^U^)ノ~YO 优化器 在ITK中最佳算法被压缩成itk::优化器对象。优化器是一个类并能应
【ITK配准】第三期 居中变换
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK配准技术中的居中变换,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动力(^U^)ノ~YO 目录 前言 1. 二维刚性配准
【ArcGIS数据处理】(一)矢量数据与栅格影像配准
简述: 本文主要介绍的是通过ArcGIS将矢量数据配准到遥感影像上,其中矢量数据的格式是.shp,栅格影像数据格式为.tif;将影像数据配准到矢量数据上同样可用此法 工具和材料: ArcMap10.2 、shapefile文件、 栅格影像 适用情况: 适合带配准对象和基准图像相距较远,难以在同一界面显示的情况 步骤: 1、制作配准文件 (1)在两个对象上选择一定数量的同名点,

计算机视觉与深度学习 | 基于特征的图像配准技术(全景图像拼接)
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 基于特征的图像配
GIS学习笔记之地理配准
在学习地理配准的过程中,想要给栅格图配准或矢量图层配准,了解到两种配准方式:影像配准和空间校正。 影像配准 1、这个是针对栅格图的,拿到栅格图时,检查图件,分析图件内容(读图),特殊点坐标。 2、打开“地理配准(georeferncing)”,添加栅格图。 3、建议将“自动校正”不勾选。 4、打开“添加控制点”工具,在栅格图上精准找到控制点,右击输入实际坐标(一般四个方向