本文主要是介绍固定翼飞行器动态逆控制中神经网络自适应补偿器设计(系列五),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
机动动作经常伴随着较大的迎角和侧滑角,不同于常规飞行,此时飞机的气动力和动力学特性呈现出较强的非线性和耦合特性。另外由于飞机模型不确定性、时标分离引入的误差和不确定性的影响,导致控制器和模型的对消是不精确的,尤其是在作动器故障、作动器位置和速度饱和、全包线飞行的飞机气动参数变化以及各种扰动作用下,控制器性能将急剧恶化甚至不稳定。因此考虑在逆控制器外环对各种因素导致的逆误差进行在线修正。
神经网络能够逼近任意的非线性函数、具有良好的学习和推理能力。以其自学习、自适应和非线性映射能力及容错性等优势在解决高度非线性和严重不确定性系统的建模和控制方面具有巨大的潜力,因此尝试用神经网络修正模型的逆误差,下图展示了加入神经网络补偿的动态逆控制框图。
注:本文的符号定义参照博客F-16飞行器非线性Simulink模型 https://blog.csdn.net/nudt_zrs/article/details/81199010


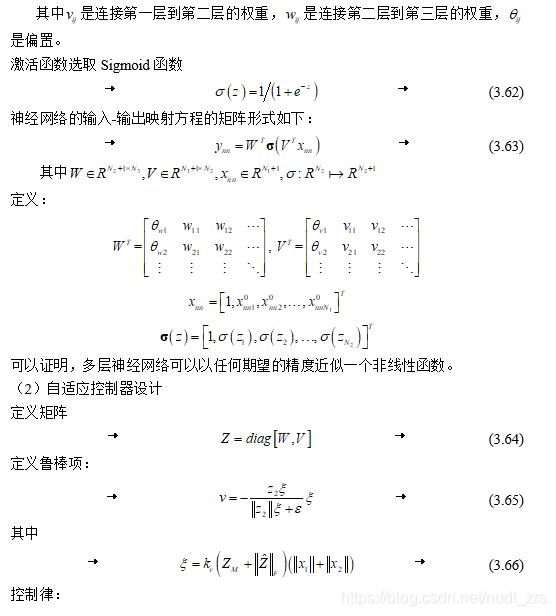
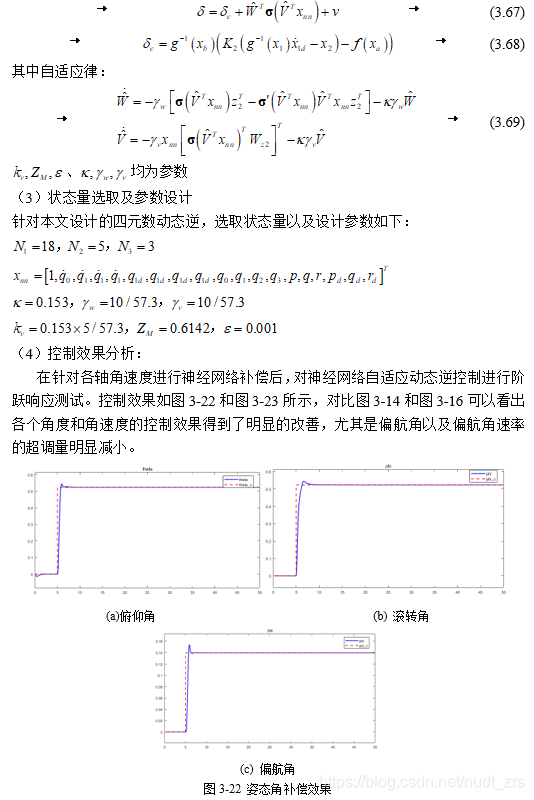
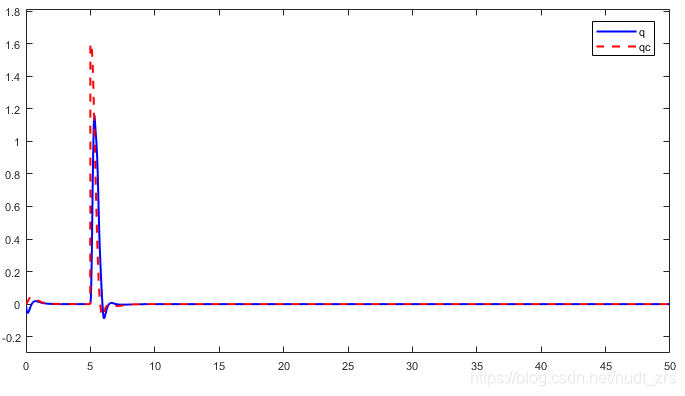
(a) 俯仰角速度 (b) 滚转角速度
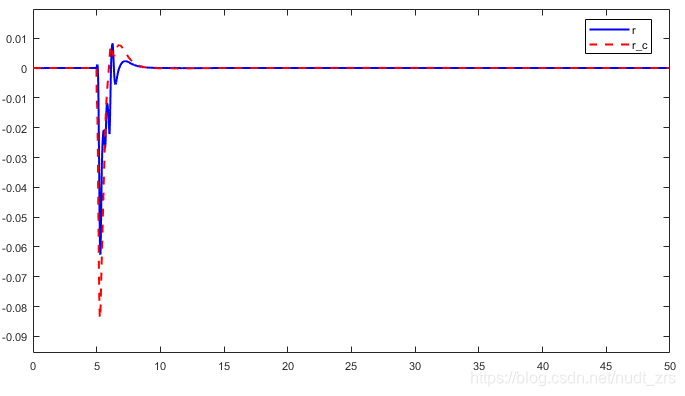
(c) 偏航角速度
这篇关于固定翼飞行器动态逆控制中神经网络自适应补偿器设计(系列五)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





