飞行器专题

Underactuated Robotics - 欠驱动机器人学(三)- 体操机器人、小车摆杆和四旋翼飞行器
系列文章目录 前言 在低维模型系统的背景下,已经开展了大量有关欠驱动系统控制的工作。这些模型系统捕捉到了问题的本质,却没有引入更真实世界的例子中经常涉及的所有复杂性。在本章中,我们将重点讨论两个最著名、研究最深入的模型系统--Acrobot 和 Cart-Pole。在我们开发了一些工具后,我们将看到这些工具可以直接应用于其他模型系统;我们将使用四旋翼机器人举出一些例子。所有这些系统都是
低空经济飞行器研发标准的先行者—侯亚文专家
在中国低空经济行业中,侯亚文专家无疑是一位受人尊敬的领航者和创新者。他专注于制定“低空经济飞行器研发能力评估标准”,这是一个参考国际ISO 33xxx系列标准,针对低空飞行器研发单位项目开发过程和能力成熟度的评估模型,收集并总结了飞行器及零部件开发商在需求分析、架构设计、软件控制和产品验证,以及项目管理、支持等一系列过程的最佳实践活动,涵盖过程能力从0到5六个级别的演进与成熟。这一标准将来的实施,

支持2.4G频秒变符合GB42590的标准的飞行器【无人机GB42590发射端】
使用方法: 放在飞机 上,按键那一面需要朝上对着天空(因为GPS陶瓷天线在按键面),支持基本ID,向量和系统包,电池容量240mAH充电1小时,使用时间大概2小时。 1.长按3秒开关机 2.开机红灯慢闪,只发射基本ID数据包,定位成功后红灯快闪发射基本ID,向量和系统包 通过高度和速度自动判断飞机在空中还是地面,自动使用起飞前的经纬度作为操作员经纬度充电绿灯常亮,充满绿灯熄灭 详情资料可在

关于电赛飞行器组要求中的不得有“无线通信及遥控”的思考与解决思路
飞控类型没有明确限制,和2019年国赛标准一致,依据往届经验,肯定更推荐用TI芯片方案,对携带遥控器、无线数传等设备有可能造成的违规作弊行为予以严令禁止,,有且进允许通过按键启动,这一点规定更加明确、清晰,避免去年国赛不同赛区对此要求认定模糊不清。 关键问题讨论: 下面给出无名创新提出的一种最简单又行之有效的与以往遥控器操作完全兼容的通过按键一件启动方案,这里拿
无名创新——2019年TI杯电赛飞行器赛题关键问题汇总
从2018年12月以来,无名创新TI飞控累计服务了全国高校累计超400个电赛飞行器学生团队,无名创新TI系列产品根据客户反馈、市场需求,完成了一次次软硬件迭代升级,比赛临近,针对近期客户担心是否能直接采用成品TI飞控开发板、TI整机二次开发学习平台用于比赛问题,下面给出客户提出的几种可能的情况,在展开讨论前,我们先列出前两年飞行器赛期的赛题要求。 无名创新客户获奖战报 无名创新TI飞控开源

基于STM32和人工智能的智能四轴飞行器系统
目录 引言环境准备智能四轴飞行器系统基础代码实现:实现智能四轴飞行器系统 4.1 数据采集模块4.2 数据处理与分析4.3 控制系统4.4 用户界面与数据可视化应用场景:智能飞行器管理与优化问题解决方案与优化收尾与总结 1. 引言 随着无人机技术的发展,智能四轴飞行器在娱乐、农业、安防和物流等领域得到了广泛应用。通过结合STM32嵌入式系统和人工智能技术,可以实现更智能的飞行控制和数据处理,

四轴飞行器、无人机(STM32、NRF24L01)
一、简介 此电路由STM32为主控芯片,NRF24L01、MPU6050为辅,当接受到信号时,处理对应的指令。 二、实物图 三、部分代码 void FlightPidControl(float dt) { volatile static uint8_t status=WAITING_1; switch(status) { case WAITING_1: //等待解锁 if(

中国飞行器设计创新大赛多旋翼无人机任务飞行
源码:后续补充 1、启动launch文件 roslaunch robot_bringup mission.launch <launch> <!--启动mavros节点 --><include file="$(find mavros)/launch/px4.launch" /><!--启动USB摄像头节点 --><include file="$(find realsense2_ca
SO3控制器原理与实现(对飞行器的控制实践)
SO3控制器原理与实现 1. 概述 SO3Control是一个基于SO(3)特殊正交群的姿态控制器,用于控制四旋翼等飞行器的姿态。该控制器输入期望的位置、速度、加速度以及偏航角,输出期望的力和四元数表示的姿态。 具体应用为当有一条三维轨迹的时候,控制飞行器进行轨迹的跟踪,为轨迹优化之后具体的机器人执行器部分。 核心思想是将姿态控制问题转化为位置控制问题,即将期望力方向作为期望的Z轴方向,再
【飞行器】基于matlab蚁群算法飞行器巡检路径【含Matlab源码 268期】
一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【飞行器】基于matlab蚁群算法飞行器巡检路径【含Matlab源码 268期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab路径规划(初级版) 备注: 点击上面蓝色字体付费专栏Matlab路径规划(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab路径规划(初级版),凭支

四轴飞行器玩具软件技术服务
广东四轴飞行器玩具软件技术服务。 东莞市酷得智能科技有限公司成立于广东省东莞市松山湖高新产业园区,我们专注于电子类方案开发设计,提供多类型的IC采购服务。 酷得的益智玩具软件方案定制服务旨在为客户提供一站式的解决方案,帮助其在竞争激烈的市场中脱颖而出。酷得将以专业的态度和技术实力,为您的项目保驾护航,实现共赢的目标。 方案定制服务包括以下几个方面: 1、功能定制:根据客户需

Delphi笔记(GL_Scene四轴飞行器模型)
有了前的一篇做铺垫,已经简单的说了GL_Scene的下载安装和一个简单的实例制作。现在就要开始制作一个3D的模型了,具体的步骤就不再这里多说了,直接上图和代码吧! 【第一版】先看一下最开始的版本吧,比较粗糙,自己感觉也有一点丑。 【第二版】在看了看匿名科创的上位机后,感觉自己的这个真的是一个屌丝呀!于是又修改了一下。 可是呢,修改了后看来还是感觉有一点点怪!不过还算看得下去。 【第三版
使用KNN/SVM进行未知飞行器预测GUI/Qt小白教程
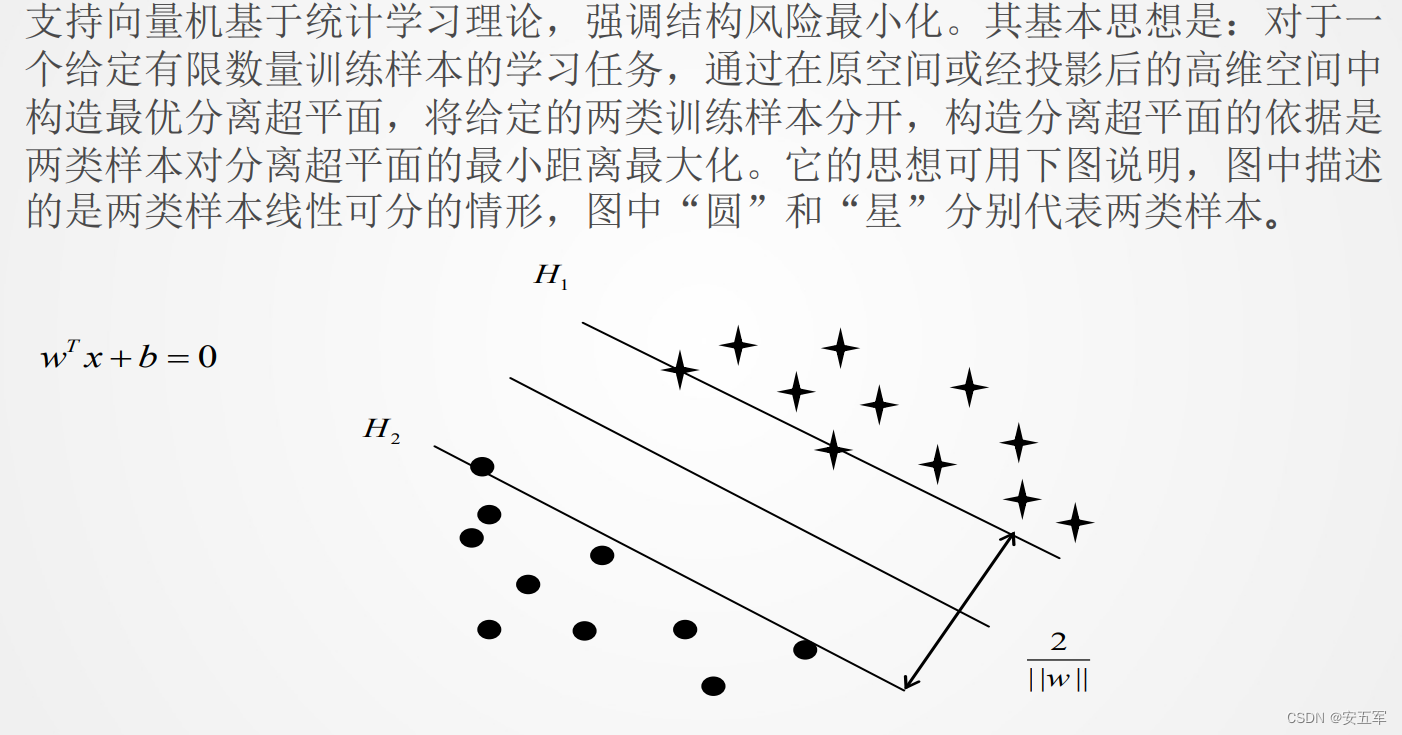
KNN 的全称是 K Nearest Neighbors,意思是 K 个最近的邻居 KNN算法具体步骤: (1)计算已知类别数据集中的点与当前点之间的距离; (2)按照距离递增次序排序; (3)选取与当前点距离最小的K个点; (4)确定前K个点所在类别的出现频率; (5)返回前K个点出现频率最高的类别作为当前点的预测分类。 在训练分类器时使用交叉验

LabVIEW飞行器螺旋桨性能测试与数据监控
LabVIEW飞行器螺旋桨性能测试与数据监控 开发LabVIEW的电动飞行器螺旋桨性能测试与数据监控系统,专门针对电动飞行器螺旋桨在运行过程中的性能测试和监控需求。通过采集转速、转矩、拉力和温度等关键参数,系统能够实时监测和分析螺旋桨的状态,为飞行安全提供支撑。 随着电动飞行器技术的快速进步,对其安全性的关注也随之增加。螺旋桨作为飞行器的核心部件,其性能直接关系到飞行器的安全与稳定。传统的监测
赛前指导:第二届未来飞行器挑战赛实践赛道之技术详解
2022(第二届)四川省大学生未来飞行器挑战赛正在火热进行中,本次挑战赛中的实践类赛道将面向全省高校大学生个人或团队征集未来先进侦察打一体化无人机的实地竞赛,主要考察路劲规划、视觉目标搜索、舵机控制、车机协同等需要团队协作的多方面技术能力。 主办方将在赛场内提供 UWB 基站信号覆盖,参赛队伍可以自主选择目标识别和定位方式。阿木实验室作为大赛技术支持方,为给参赛队员提供更全面的指导,

四、电赛TI官方LaunchPad板飞行器MSP432飞控解/上锁、功能模式操作教程
1、飞行器的解锁 左边遥杆处于右下角,持续1.5S左右,飞控会进入解锁状态,当解锁后,绿色指示灯会进行慢闪状态,解锁后6秒钟内,如果无推油、打杆动作,飞控会自动上锁,同时绿色指示灯会同步快闪3S。若解锁后6S内,有推油、打杆动作,飞控会一直处于解锁状态同时绿色指示灯会进行流水灯快闪状态3S。 飞控处于解锁状态时如果满足着陆条件,电机会进入上锁状态(以较低的油门量转动);当不满足着地条件时,飞控

【无人机协同】基于matlab无人飞行器协同车辆物资配送【含Matlab源码 1899期】
⛄一、单车单机映射模式简介 单车单机映射模式(traveling salesman problem with drone,TSP-D)的分析可以基于任新惠提出的无人机和车辆组合配送模式进行分析。 1 无人机和车辆同步配送模式 2015年,Murray和Chu引入了一种新型的旅行商问题,称为“飞行跟班旅行商问题”(flying sidekick traveling salesman proble
适合搜救的MINI飞行器
2008年的大地震,无数人生死离别. 科技以人为本,看到一款MINI飞行器,改造下加上摄像头等功能,如果大量生产,在灾难出现的时候,一下放出几万个,说不定可以救活更多的人. 这样的飞行器应该: 1,便宜,否则无法大规模量产 2,高清拍照,录像录音功能.灾难发生时,网络肯定是中断了.搜救飞行器只能按预订程序不断拍照,录像,然后发给搜救人员.然后通过程序自动分析视频+照片+声音再加上人工判断,

航空飞行器运维VR模拟互动教学更直观有趣
传统的二手车鉴定评估培训模式存在实践性不强、教学样本不足、与实际脱节等一些固有的不足。有了VR虚拟仿真技术的加持,二手车鉴定评估VR虚拟仿真实训系统逐渐进入实训领域,为院校及企业二手车检测培训提供了全新的解决方案。 高职院校汽车专业虚拟仿真实训平台建设方案是VR虚拟现实公司利用3D虚拟仿真技术,基于真实汽车生产四大工艺(汽车冲压、汽车焊接、汽车涂装、汽车装配),构建1:1高度仿真模型,模
MATLAB - 四旋翼飞行器动力学方程
系列文章目录 前言 本例演示了如何使用 Symbolic Math Toolbox™(符号数学工具箱)推导四旋翼飞行器的连续时间非线性模型。具体来说,本例讨论了 getQuadrotorDynamicsAndJacobian 脚本,该脚本可生成四旋翼状态函数及其雅各布函数。这些函数将在使用非线性模型预测控制(模型预测控制工具箱)控制四旋翼飞行器的示例中使用。 四旋翼飞行器又称四旋翼直

美国公司计划明年推出状似飞碟的飞行器(图)
美国公司计划明年推出状似飞碟的飞行器(图) 测试中的“飞碟” 点击浏览更多最新图片 美国“穆勒国际”公司目前正在研制一种状似“飞碟”的新型交通工具———“M200G飞行器”。该飞行器可垂直起降,一次可容纳两人,适合于任何地表。借助所谓的“气垫”效应,它可以在距离地表3米的高度上平稳飞行。据悉,这种全球首款“飞碟”将于明年上市,每款售价9万美元。 最高时速160公

无人驾驶飞行器巡航监测系统(分享15年创意比赛)
山区,滨海,建设兵团等工作环境比较恶劣的地方,人们进行生产活动和监测环境比较困难,当今的飞行器大多用于简单的航拍功能,并不能起到有效采取信息,提高工作效率的目的,这也是我们本次设想的创新点,用无人驾驶飞行器进行监测获取信息,以此更好的安排生产活动,预防病虫害和天气灾害。 无人机主要控制有飞控和计算机来完成,基站进行传输,通信和电池充电或更换;信息采集由微型微电子控制传感器(加速度计、陀螺仪、电子

仿生燕子飞行器项目简介
研究重点进度表仿生设计 研究重点 重点解决办法鸟翼3D打印材料运动机构微型步进电机和舵机飞行控制器利用开源飞控测试后再优化 进度表 1 了解目前仿生材料种类,测试适合作为机翼的材料(7-15d) 2 利用15-16年无人机项目的剩余物料搭建骨架并测试运动性能(20d) 3 主要实现飞行基本功能,实现爬升和控制航向(10d) 仿生设计

《多旋翼无人飞行器嵌入式飞控开发指南》里面也是基于FreeRTOS开发飞控,这也目前已经至少有三个用FreeRTOS开发飞控的,正点原子,ACfly,PX4/APM也是基于操作系统
《多旋翼无人飞行器嵌入式飞控开发指南》里面也是基于FreeRTOS开发飞控,这也目前已经至少有三个用FreeRTOS开发飞控的,正点原子,ACfly,而且还知道crazypony也在想把飞控移到FreeRTOS上。刚刚发现一个基于UCOS写飞控的书。然后PX4/APM不也是基于操作系统来开发的么,用的NUTTX操作系统!!!也有进程间通信!!!!还有人把PX4的操作系统替换为FreeRTOS,更加

2017.04.19 特种机器人-载人四轴飞行器亿航184介绍
拿了VC的5200万美金后,中国工科男造出了让世界震惊的"飞行汽车"! 北京时间2016年1月7日3:00(美国西部时间2016年1月6日11:00),中国智能无人机公司亿航,于拉斯维加斯2016 CES国际消费类电子产品展览会上,全球首发全电力低空自动驾驶载人飞行器——"亿航184"! 第一次实现了人类的全自动驾驶飞行 亿航184意寓:1位乘客,8支螺旋桨,4支机臂。这是继GHOS