固定翼专题
油动长航时垂直起降固定翼无人机技术详解
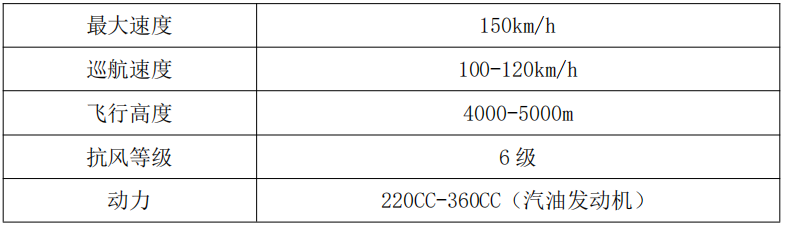
油动长航时垂直起降固定翼无人机技术是一种结合了固定翼无人机长航时、高速度、远距离飞行能力和旋翼无人机垂直起降灵活性的创新技术。以下是对该技术的详细解析: 一、技术特点 1. 垂直起降能力: - 无需长距离的滑行跑道,可以在狭小空间内实现垂直起降,极大地提高了无人机的部署灵活性和环境适应性。 - 多采用固定翼结合多旋翼的复合翼设计,通过旋翼的旋转产生升力,实现垂直起降。

基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试
基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试 本文内容大部分来自Kris,我们的K大,在VTOL领域的大牛,在此,非常感谢K大。能引用K大的成果也是自己的荣幸,不便之处还请K大多多包涵,在此引用只是为方便自己日常学习,部分参数表里根据自身情况,增加了修改环节和相应参数。 垂直起降固定翼 中文教程-参数设置 垂直起

关于Ardupilot的固定翼(plane)的控制
起因 由于项目原来是使用的四旋翼,并且是PX4版本的四旋翼; 如今需要对无人机固定翼进行控制,并要求使用Ardupilot的固件进行研究。 特定在此记录对固定翼的学习,以和大家分享观点和交流学习。 PX4和Ardupilot关系 PX4和Ardupilot都是固件,固件就是软件的意思。两者都是无人机开源组织发行的开源版无人机驾驶固件。 APM和pixhawk是硬件平台,在之前,APM是Ard

垂起固定翼+多旋翼无人机+集群组网:高低空域协同组网通信技术详解
垂起固定翼、多旋翼无人机与自组网的结合,为高低空域协同组网通信技术提供了创新的解决方案。这种结合充分利用了各种技术的优势,使得无人机在高低空域中的协同作业和通信更加高效和灵活。 首先,垂起固定翼无人机以其垂直起降能力和长航时的特点,适合在高空域进行侦察、监视和通信中继等任务。多旋翼无人机则以其灵活的飞行能力和稳定的悬停性能,在低空域进行精细作业和拍摄任务。这两种无人机在高低空域中协同作业,可以充

无人机基础技术,固定翼无人机动力系统技术详解,无人机飞行控制系统技术
推重比选择 推重比,是指无人机发动机推力/拉力与无人机飞行重力之比。该参数是衡量动力系统乃至整机性能的重要参数,很大程度上影响飞行性能。固定翼无人机的动力系统在配置时选择的推重比必须达到或超出设计的推重比。 重量要求 翼载荷是无人机单位面积升力面所承受的气动力载荷。翼载荷可衡量飞行中机翼的受载状况,直接影响到无人机的飞行性能:翼载荷小,飞行速度慢,无人机的操纵性和机动性较好:翼载荷大
测绘固定翼飞机搭载尼康D810相机的使用及维护手册
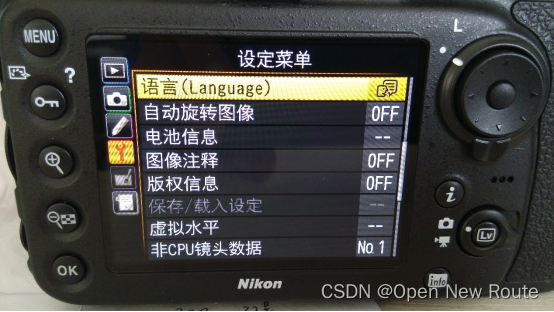
任务相机的使用及维护手册 电动固定翼无人机使用的是尼康D810相机,该相机为全画幅相机,传感器尺寸(35.9*24mm),最大像素数3709万,有效像素3638万,最高分辨率7360×4912。相机镜头采用尼康35MM定焦镜头,配合该镜头可以使飞机的作业效率提到最高。 该相机在出厂前会经过专业的相机检校,并配以校验报告,以满足客户在后期处理的图像可以达到测绘级标准。 一、
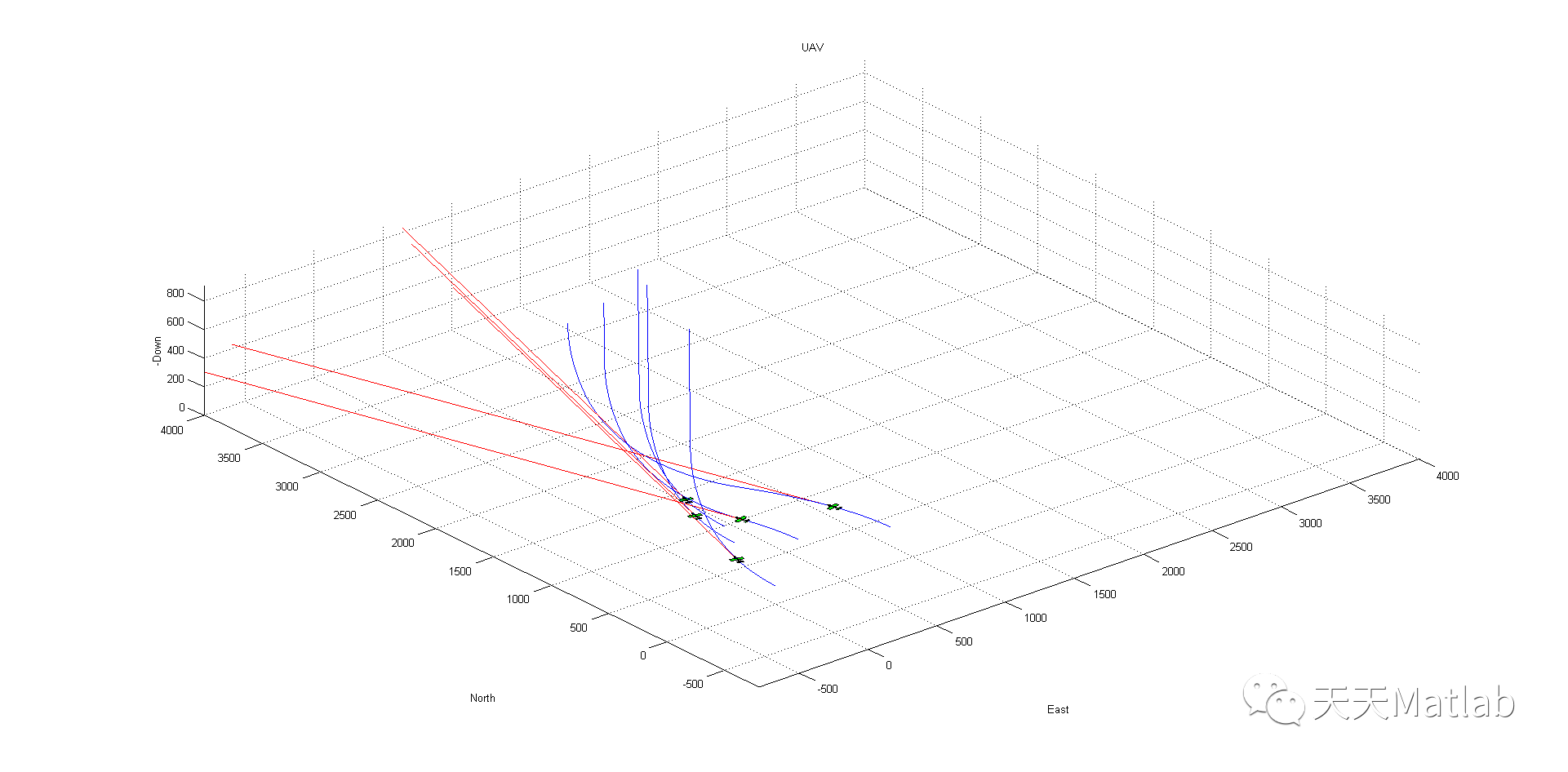
基于分布式模型和一致性控制实现多架固定翼无人机追捕目标仿真附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划



VTOL是指这样的,垂直起降固定翼,不是四旋翼
VTOL是指这样的,垂直起降固定翼,不是四旋翼 https://mp.weixin.qq.com/s/-iqIsDF8lPNr7wvFQ08sZg

固定翼无人机运动学建模
鱼弦:CSDN内容合伙人、CSDN新星导师、全栈领域创作新星创作者 、51CTO(Top红人+专家博主) 、github开源爱好者(go-zero源码二次开发、游戏后端架构 https://github.com/Peakchen) 固定翼无人机的运动学建模是描述无人机在空中运动的数学模型,它基于刚体运动的原理和航空力学理论。下面是对固定翼无人机运动学建模的原理详细解释、流程图、使用场景
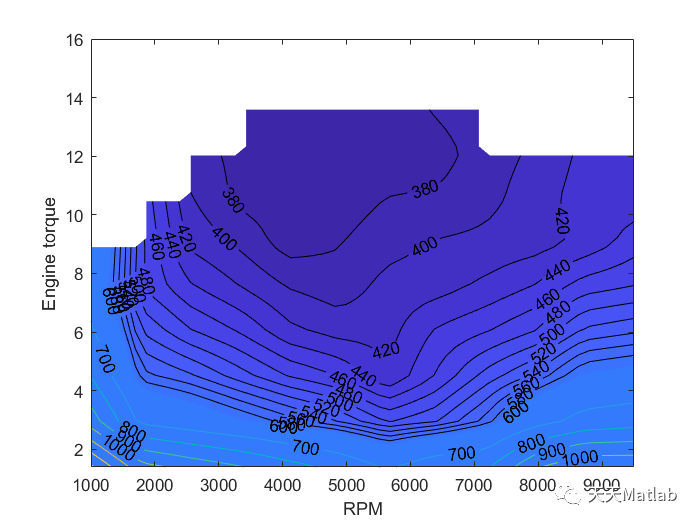
【无人机】固定翼无人机简化燃油燃烧仿真的 simulink 模型
1 简介 固定翼无人机简化燃油燃烧仿真的 simulink 模型 2 部分代码 clear close allclc%% aero dataSref=0.6 ;% m2aero_UAV=xlsread('UAVdata.xlsx','A:C');CL_uav=aero_UAV(:,1);CD_uav=aero_UAV(:,2);% polynomial for drag polarD
Tiny Plane固定翼小飞机机身硬件整理开源
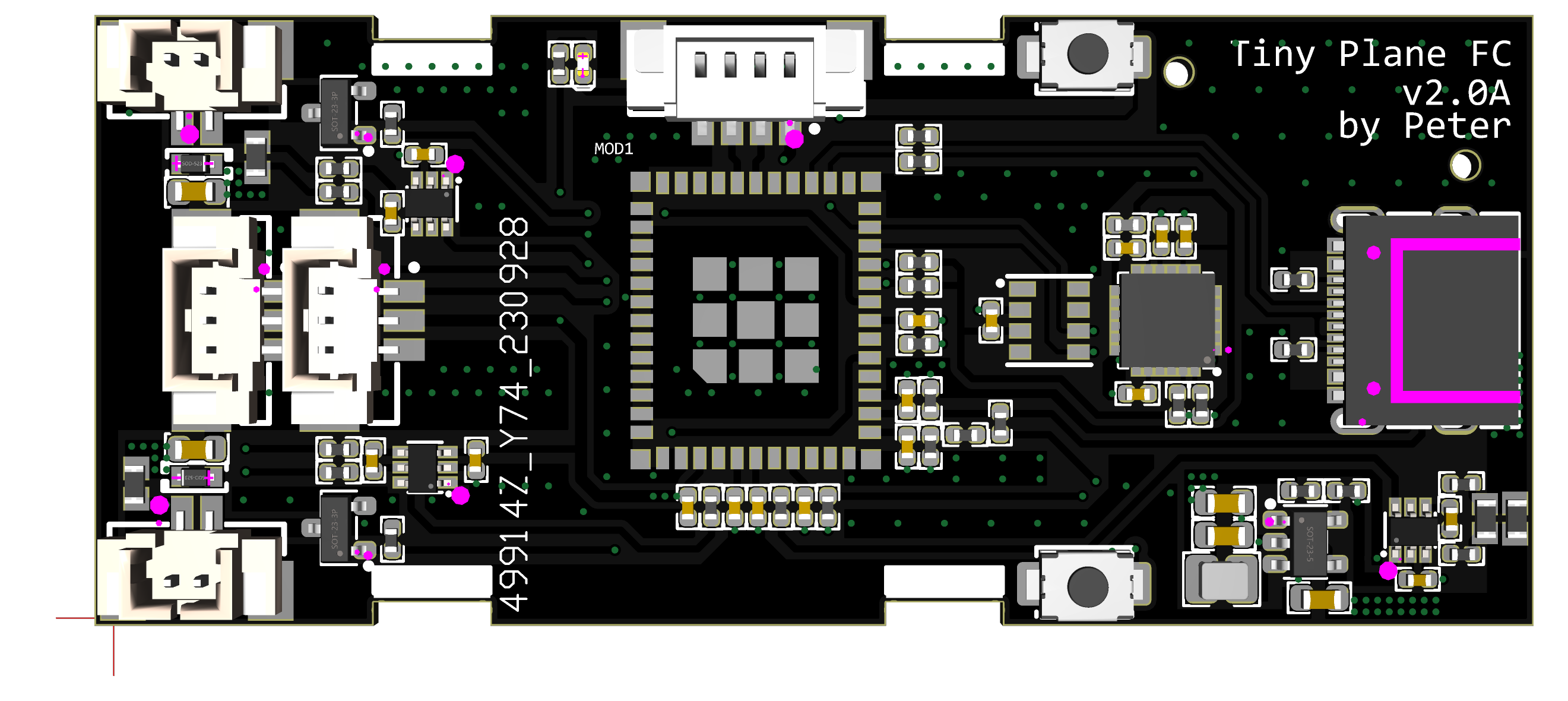
简介 Tiny Plane是一个固定翼小飞机飞控项目,旨在DIY一款操控良好、飞行时间长、可玩性高的固定翼小飞机。目前基于48cm翼展手抛机进行改装,飞控采用ESP32-C3。 特性 飞控主要特性: 单串锂电池供电,最大工作电压5.5V电源电压、电流感测锂电池温度感测DCDC降压电源,效率90%以上3轴加速度计,3轴陀螺仪气压计,高度精度10cm2路动力电机通道,支持电流感测2路数字IO通
Tiny Plane固定翼小飞机机身硬件整理开源
简介 Tiny Plane是一个固定翼小飞机飞控项目,旨在DIY一款操控良好、飞行时间长、可玩性高的固定翼小飞机。目前基于48cm翼展手抛机进行改装,飞控采用ESP32-C3。 特性 飞控主要特性: 单串锂电池供电,最大工作电压5.5V电源电压、电流感测锂电池温度感测DCDC降压电源,效率90%以上3轴加速度计,3轴陀螺仪气压计,高度精度10cm2路动力电机通道,支持电流感测2路数字IO通
固定翼多种PID学习总结
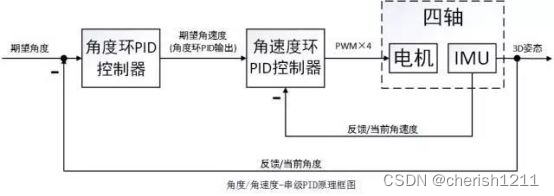
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言PID介绍位置PID增量PID位置和增量PID的关系 串级PID模糊PID自适应模糊PID 优化PID方法 前言 固定翼多种PID学习总结 参考如下: 参考一 参考二 PID介绍 位置PID e(k): 用户设定的值(目标值) - 控制对象的当前的状态值 比例P : e(k) 积分

图形化编程飞控CCA42--垂起固定翼飞行控制律建模
CCA4X工业级多功能图形化编程飞行控制系统,采用了类似于MATLAB和Simulink的控制律组态建模设计软件,只需简单操作鼠标连接相关的功能模块,无需编写代码就可以构建结构和流程直观清晰的飞行控制系统程序。 通过内置的JSBSim和FlightGear组成的半实物仿真系统,能够从理论设计直接快速转入到开发应用阶段,高效快捷地完成飞行控制系统的组态建模、系统辨识、动态仿真、在线调参
固定翼飞行器动态逆控制中神经网络自适应补偿器设计(系列五)
机动动作经常伴随着较大的迎角和侧滑角,不同于常规飞行,此时飞机的气动力和动力学特性呈现出较强的非线性和耦合特性。另外由于飞机模型不确定性、时标分离引入的误差和不确定性的影响,导致控制器和模型的对消是不精确的,尤其是在作动器故障、作动器位置和速度饱和、全包线飞行的飞机气动参数变化以及各种扰动作用下,控制器性能将急剧恶化甚至不稳定。因此考虑在逆控制器外环对各种因素导致的逆误差进行在线修