本文主要是介绍RoNIN:基于残差网络的IMU传感器数据用于运动估计和定位(CVPR-2019),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
RoNIN:基于残差网络的IMU传感器数据用于运动估计和定位(CVPR-2019)
文章来源 RoNIN: Robust Neural Inertial Navigation in the Wild: Benchmark, Evaluations, and New Methods
1.文章概述
1.1 Main Idea
IMU传感器数据–>>深度网络–>>自然运动的轨迹

1.2 Main Contribution
- 构建了一个新的数据集,包含来自100个人体物体的40小时以上的IMU传感器数据,在自然人体运动下具有真实的三维轨迹(是身体轨迹,不是IMU phone的轨迹)。
- 提出了一种新的直接对IMU传感器数据进行处理的学习模式,对比了现有的最佳方法,能够取得较好的效果,在实际的测试数据是有显著改进。
2.The RoNIN dataset
2.1 数据说明
规模、多样性和可信度是构建下一代惯性导航数据库的三个关键因素,与目前最大的数据库oxiod相比:
规模(276个序列,3栋建筑)
多样性(100人,用了3台设备)
可信度(日常生活轨迹)

2.2数据采集
作者开发了一个用于数据收集的Android应用程序,它既可以安装在3D追踪设备上,也可以安装在IMU手机设备上。该应用程序允许一对3D追踪设备和IMU手机通过蓝牙连接起来,以实现粗略的时间同步和集中控制。
设备
- 3D追踪器
三星Galaxy S9和谷歌Pixel 2XL,使用来自STMicro的相同的lsm6dsl传感器。 - IMU采集设备
华硕Zenfone AR、使用InvenSense的icm20602 IMU传感器
标定设备
对所有传感器进行仔细校准,如陀螺仪偏差、加速度计偏差/标度灵敏度和磁强计偏差,以及每个数据序列。作者了使用经过校准的原始IMU数据,而不是系统提供的原始出数据,因为发现后者在不同制造商之间存在差异。
对加速度计的三轴偏差和标度灵敏度进行了标定。首先将智能手机静态地放置在不同的朝向上,标定参数是通过求解一个非线性优化问题得到的,通过给定这个优化问题的约束条件,即每个静态周期的加速度的平均值经修正后应接近重力加速度g,每部智能手机每天重新校准一次。
通过将智能手机静态放置10秒,可以有效地估计陀螺仪偏差,在此期间,将陀螺仪读数平均为偏差。同时在每个序列之前和之后执行这种校准。
时间同步
当通过蓝牙连接时,两个智能手机的系统时钟被粗略地同步。在每个序列之前,我们执行水平旋转,同时将两个电话刚性连接在一起。然后通过信号相关性估计精确的时间差。
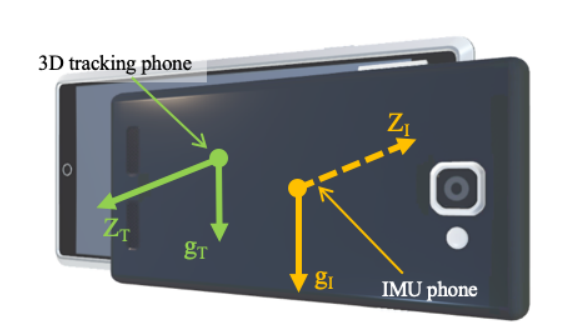
空间对准
我们在屏幕上安装了两个电话屏幕,以便进行空间对齐。屏幕面向外部的手机是3D跟踪设备(绿色),而屏幕内的设备是imu手机(橙色)。zt和zi是两个设备的局部z轴,假设屏幕绝对平坦,它们彼此完全相反。gt和gi是两个局部帧中的重力分量。
修正 Ground-truth 漂移
地面真相轨迹和imu器件的定向都会随着时间的推移而漂移。作者设计了减少这种漂移误差的程序。
我们依靠Android的传感器融合来实现IMU手机的其他功能,即使用应用程序而不使用磁力计。陀螺仪偏差是在每个序列之前估计的。我们利用[1]中提出的基于滤波的算法,利用地面真实信息进一步减少旋转漂移。标准运动学模型用于预测原始加速度和角速率的6自由度。来自3D跟踪设备的地面真值位置被用作测量,以过滤出最佳状态,即位置和方向,以及相应的不确定性。
当手机放在口袋或包中时,IMU手机的方向不可见(由于没有图像信息)。我们通过端点旋转漂移来近似评估质量,在这里我们执行与第2节中描述的相同的空间对齐,并计算预期方向和实际方向之间的角度,假设探戈的方向没有漂移。我们发现Android的传感器融合通常会在10分钟内漂移10到20度,而过滤会将其降低到5到10度。请注意,过滤后的方向仅用于训练,我们在测试期间完全依赖于Android设备的game rotation向量。
注意
在数据采集之前,对空间和时间内的两个设备进行偏置和对齐。在数据采集之后,也会再次对两个IMU传感器设备进行空间对齐,以评估IMU设备定向中的累积误差。
将数据集分为两组:第1组85人,第2组其余15人:第1组进一步分为训练、验证和测试集,第2组用来测试模型的泛化能力。
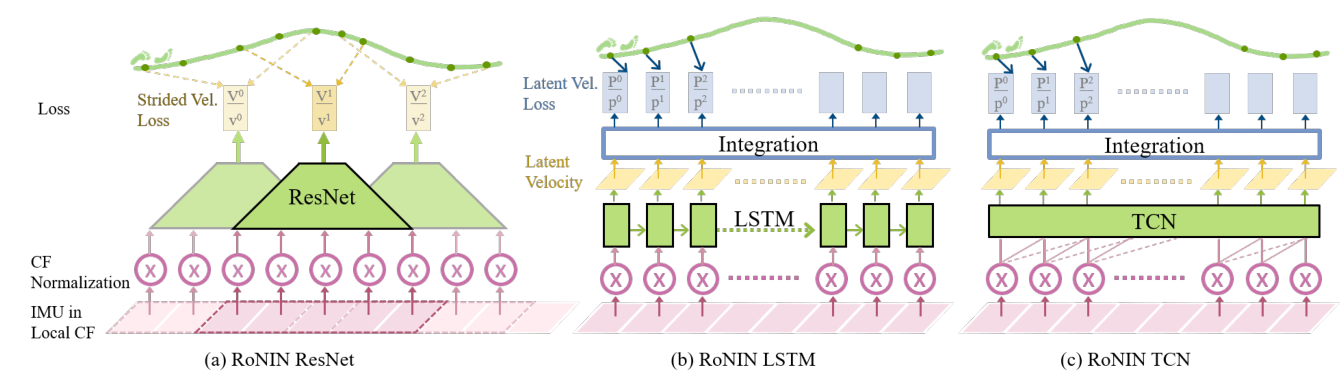
3.网络结构
4.参考文献
[1] A. Solin, S. Cortes, E. Rahtu, and J. Kannala. Inertial odometry on handheld smartphones. In 2018 21st International Conference on Information Fusion (FUSION), pages 1–5. IEEE,2018.
转载请注明出处,欢迎交流讨论、纠错,敬请留言!
这篇关于RoNIN:基于残差网络的IMU传感器数据用于运动估计和定位(CVPR-2019)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







