本文主要是介绍【相机成像】相机画面最近点到光心在地面投影的距离计算,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、 相机下俯:pitch<0
如下图所示,相机下俯时,成像平面向右倾斜。
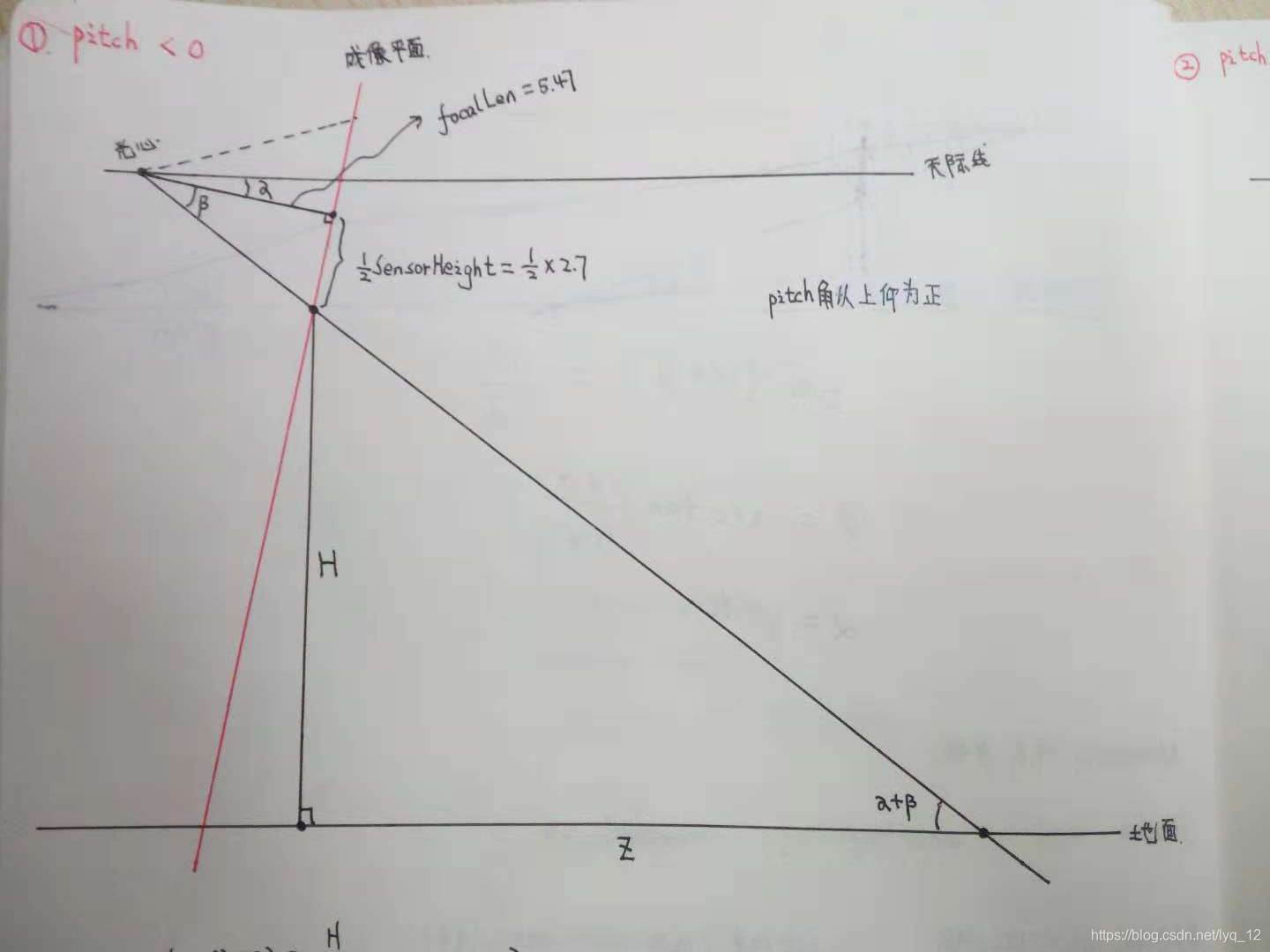
由图中三角关系易知:
![]() (1)
(1)
 (2)
(2)
![]() (3)
(3)
联立式(1)、(2)、(3),可得:
 (4)
(4)
其中,Z为相机画面最近点到光心在地面投影的距离;H为相机安装高度;focalLen为光心到像平面的距离;sensorHeight为相机传感器高度;pitch为相机安装俯仰角,上扬为正。
2、相机上扬:pitch>0
相机上扬时,成像平面向左倾斜,对象的成像关系如下图所示。

类似地:
![]() (5)
(5)
 (6)
(6)
![]() (7)
(7)
联立式(5)、(6)、(7),可得:
 (8)
(8)
3、结论
综合pitch<0和pitch>0的情况,可以发现相机画面最近点到光心在地面投影的距离Z计算公式相同,均为:
 (9)
(9)
则相机画面最近点到车头的距离CAR_SCOPE_BOTTOM为:

这篇关于【相机成像】相机画面最近点到光心在地面投影的距离计算的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








