投影专题

常见的投影类型及详细解释
常见的地图投影根据保留地球的不同几何特性(形状、面积、距离等)可以分为几大类。以下是常见的投影类型及详细解释: 一、正形投影(保持形状) 1. 墨卡托投影(Mercator Projection) 特点:保持形状,但严重扭曲面积,尤其在高纬度地区。应用:海洋导航、在线地图(如 Google Maps 在小比例尺下使用)。原理:投影将地球表面展开成矩形,经线垂直,纬线等距。优点:航线在图上为直

5-7千元性价比最高的家用4K投影:大眼橙X30Ultra和当贝X5SPro对比
临近开学又有不少投影品牌上了新品,大眼橙这家国产投影品牌也在9月初上新了两款不同价位的投影,一款是三千多的X7DUltra,一款是五千多的X30Ultra。正好有朋友最近向我咨询购买投影仪的事情,他预算六千左右,问有没有值得买的4K投影仪,挑了一款六千价位卖的最火爆的当贝X5SPro和这款新品大眼橙X30Ultra对比看看,哪款配置更高,谁更值得买。 选择当贝X5SPro这款产品
1.39TB高清卫星影像更新(WGS84坐标投影)
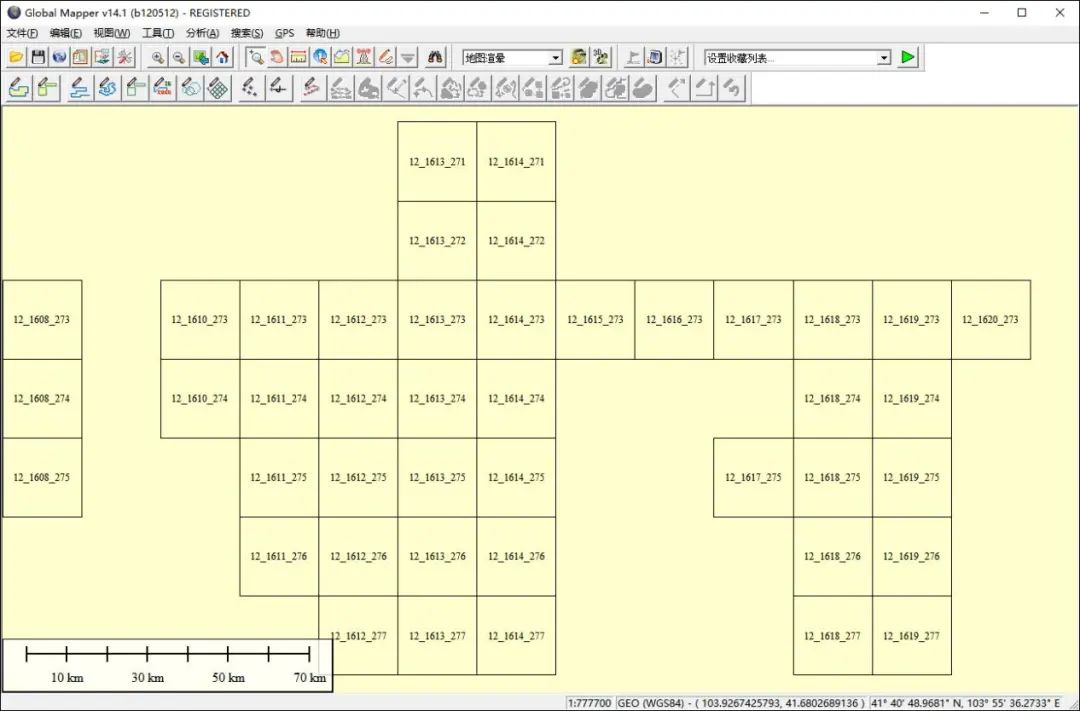
最近对WGS84版的高清卫星影像数据进行了一次更新,并基于更新区域生成了相应的接图表。 1.39TB高清卫星影像更新 本次数据更新了1576个离线包,共1.39TB大小,并全部生成了更新接图表。 更新接图表范围 更新接图表由每一个离线包文件的范围构成,放大地图可以查看接图表的编号。 接图表编号 我们打开瓦片编号并放到到第12级,可以发现接图表的编号与瓦片编号完全一

opencv的球面投影
cv::detail::SphericalProjector 在全景图像拼接任务中,可能需要对多个图像进行球面投影以实现无缝拼接。每个cv::detail::SphericalProjector可以负责一个图像的球面投影操作。通过将多个这样的投影器存储在std::vector中,可以对一组图像依次进行投影处理,为后续的图像融合和拼接做准备。 例如,当拼接一组由不同角度拍摄的照片以创建全景图时,这

GAMES202——作业5 实时光线追踪降噪(联合双边滤波、多帧的投影与积累、À-Trous Wavelet 加速单帧降噪)
任务 1.实现单帧降噪 2.实现多帧投影 3.实现多帧累积 Bonus:使用À-Trous Wavelet 加速单帧降噪 实现 单帧降噪 这里实现比较简单,直接根据给出的联合双边滤波核的公式就能实现 Buffer2D<Float3> Denoiser::Fil

Opencv中的直方图(1)计算反向投影直方图函数calcBackProject()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C++11 算法描述 计算直方图的反向投影。 cv::calcBackProject 函数计算直方图的反向投影。也就是说,类似于 calcHist,在每个位置 (x, y),该函数收集输入图像中选定通道的值,并找到对应的直方图区间。但是,与其递增该区间值,该函数读
墨卡托、高斯克吕格、UTM投影
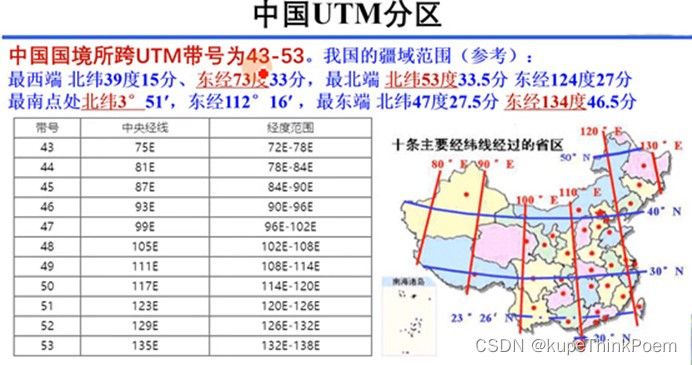
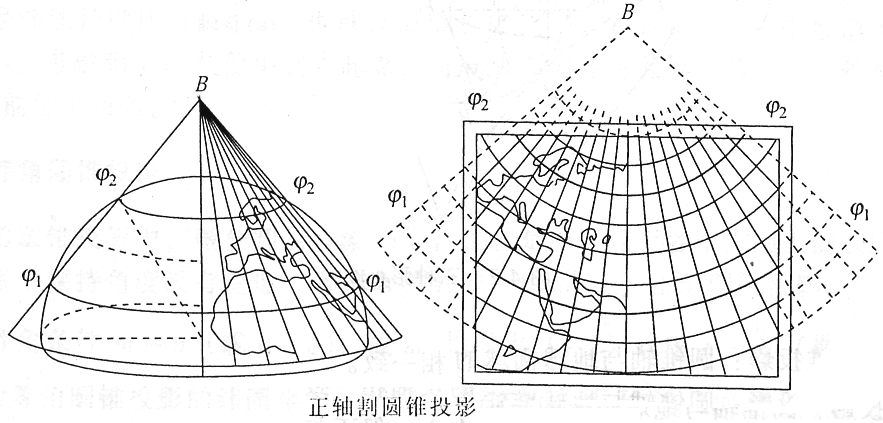
https://wenku.baidu.com/view/e53e7dd4f71fb7360b4c2e3f5727a5e9846a274b.html 1, 什么是UTM(Universal Transverse Mercator projection)投影? UTM投影全称为:通用横轴墨卡投影,是一种等角横轴割圆柱投影。椭圆柱割地球于南纬80度,北纬84度两条等高
【译】PCL官网教程翻译(21):旋转投影统计(RoPs)特征 - RoPs (Rotational Projection Statistics) feature
英文原网址查看 旋转投影统计(RoPs)特征 在本教程中,我们将学习如何使用pcl::ROPSEstimation类来提取点特性。在这门课中实现的特征提取方法是由Yulan Guo, Ferdous Sohel, Mohammed Bennamoun, Min Lu and Jianwei Wanalso在他们的文章《旋转投影统计用于三维局部表面描述和目标识别》中提出的。 理论基础 特征提

【解析几何笔记】8.向量的投影与内积
8. 向量的投影与内积 复习前面的知识:,若BCE三点共线,则 A E ⃗ = ( 1 − s ) A B ⃗ + s A C ⃗ , ( B , C , E ) = μ ⇒ s = μ 1 + μ , 1 − s = 1 1 + μ \vec{AE}=(1-s)\vec{AB}+s\vec{AC},(B,C,E)=\mu\Rightarrow s=\frac{\mu}{1+\mu},1-s=

前端实现投影坐标和地理坐标系(CGCS2000)转换
前言 地理坐标系和投影坐标系是地理信息系统(GIS)和制图学中用于描述地球表面位置的两种不同的参考系统。它们在使用方式和应用场景上有显著的区别。 1、什么是地理坐标系和投影坐标系? 1.1、地理坐标系 地理坐标系是基于地球的三维球面模型来描述位置的系统。地理坐标系通常使用经度和纬度来表示地球表面的任何一个点。常见的地理坐标系:WGS1984(World Geodetic System 19

OpenGL ES 2.0 正交投影和透视投影
本文载自:http://blog.csdn.net/shulianghan/article/details/46680803 正交投影效果 : 透视投影效果 : 投影简介 摄像机位置 摄像机参数 : 摄像机位置 : 摄像机的 三维坐标位置 x, y, z 坐标;观察方向 : 摄像机镜头的朝向, 是一个三维向量, 指向一个三维坐标方向;up 方向 : 有了位置 和 朝向,

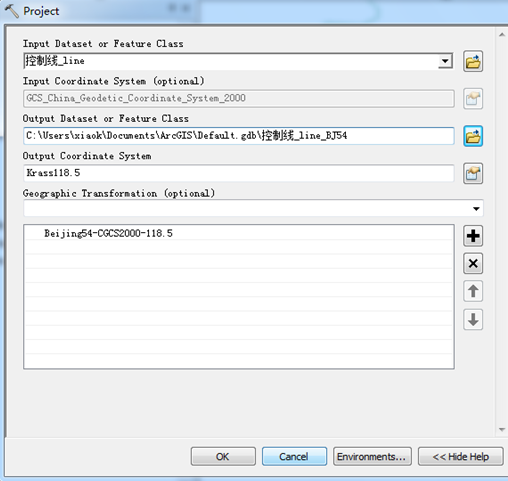
ArcGIS如何将投影坐标系转回为地理坐标系
有时候两个数据,一个为投影坐标系,另一个为地理坐标系时,在GIS软件中位置无法叠加到一起,这需要将两个或多个数据的坐标系统一,可以直接将地理坐标系的数据进行投影,或将投影坐标系转为地理坐标系。下面介绍如何将数据的投影坐标系转回为对应的地理坐标系。 使用ArcGIS将数据的投影坐标系转回为地理坐标系时,若数据为矢量数据,则可使用ArcGIS工具箱中的【数据管理工具】—【投影和变换】—【投影】,将数
box-shadow投影
格式 box-shadow: h-shadow v-shadow blur spread color inset; 比如 box-shadow:10px 10px 20px 5px block; //前两个值可以为负值,表示向上或向左 当需要四周阴影时,前两个值都设为0 0即可。
展览中的投影墙互动有哪些新玩法?
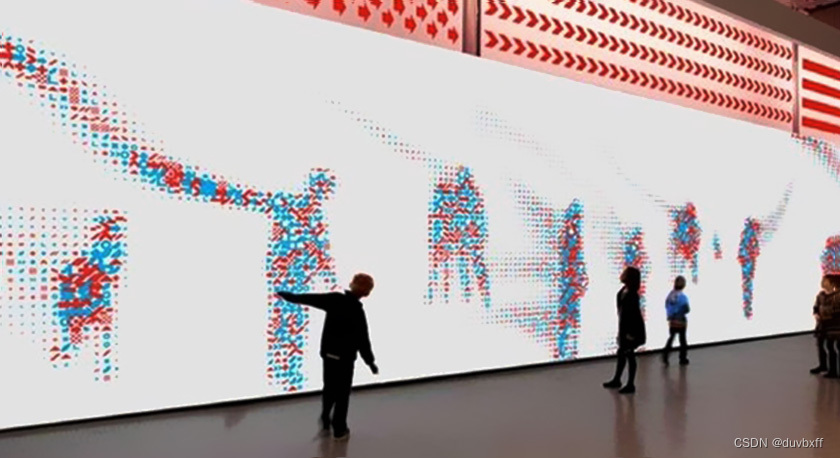
随着投影技术的飞速发展,它已经突破了传统场地、面积和形式的限制,为各类展示场景带来了前所未有的新颖投影形式。这些投影案例中,不乏一些在不规则墙面、独特物品外观上精彩呈现的典范。这些结合投影技术与互动技术的展示形式,不仅令观众眼前一亮,更为他们带来了更加生动、有趣且沉浸式的体验。今天,就让我们一起深入探索投影互动墙在展览展示中的几种令人惊艳的创意形式吧! 一、墙面互动投影游戏 墙面互动投影与

SQL-查询结果显示-投影、去重、重命名、排序
一、数据查询 1、数据查询是指根据用户需求从数据库中提取数据并将查询结果显示出来,SQL语言中的SELECT语句可以完成数据查询 2、完整的数据查询语句的格式: SELECT 【ALL|DISTINCT】<目标列表达式1>【,<目标列表达式2>,...】 FROM <表名或视图名1>【,<表名或视图名2>,...】 【WHERE <元组选择条件表达式>】 【GROUP BY <属性列名

PawSQL优化 | 分页查询太慢?别忘了投影下推
在进行数据库应用开发中,分页查询是一项非常常见而又至关重要的任务。但你是否曾因为需要获取总记录数的性能而感到头疼?现在,让PawSQL的投影下推优化来帮你轻松解决这一问题!本文以TPCH的Q12为案例进行验证,经过PawSQL的优化后性能提升6000多倍! 分页查询的痛点 在进行分页查询时,我们通常需要获取总记录数以计算总页数。绝大多少程序员会在原查询上添加count(1)或count(*)
【地理坐标系、大地坐标系与地图投影与重投影详解】
原博文: 地理坐标系、大地坐标系与地图投影与重投影详解 基本概念 首先简单介绍一下地理坐标系、大地坐标系以及地图投影的概念: 地理坐标系:为球面坐标。 参考平面地是椭球面,坐标单位:经纬度;投影坐标系:为平面坐标。参考平面地是水平面,坐标单位:米、千米等;地理坐标转换到投影坐标的过程可理解为投影。(投影:将不规则的地球曲面转换为平面) 从以上三个概念相应到可以涉及到三个问题: 地理坐标

【光谱特征选择】连续投影算法SPA(含python代码)
目录 一、背景 二、代码实现 三、项目代码 一、背景 连续投影算法(Successive Projection Algorithm,SPA)是一种用于光谱分离的简单且有效的算法。它主要应用于高光谱图像处理,用于提取混合光谱数据中的端元(endmembers)。端元是指在高光谱图像中存在的纯物质的光谱签名,这些签名在混合像元的光谱数据中有重要的影响。 SPA的基本原理是通过迭代过
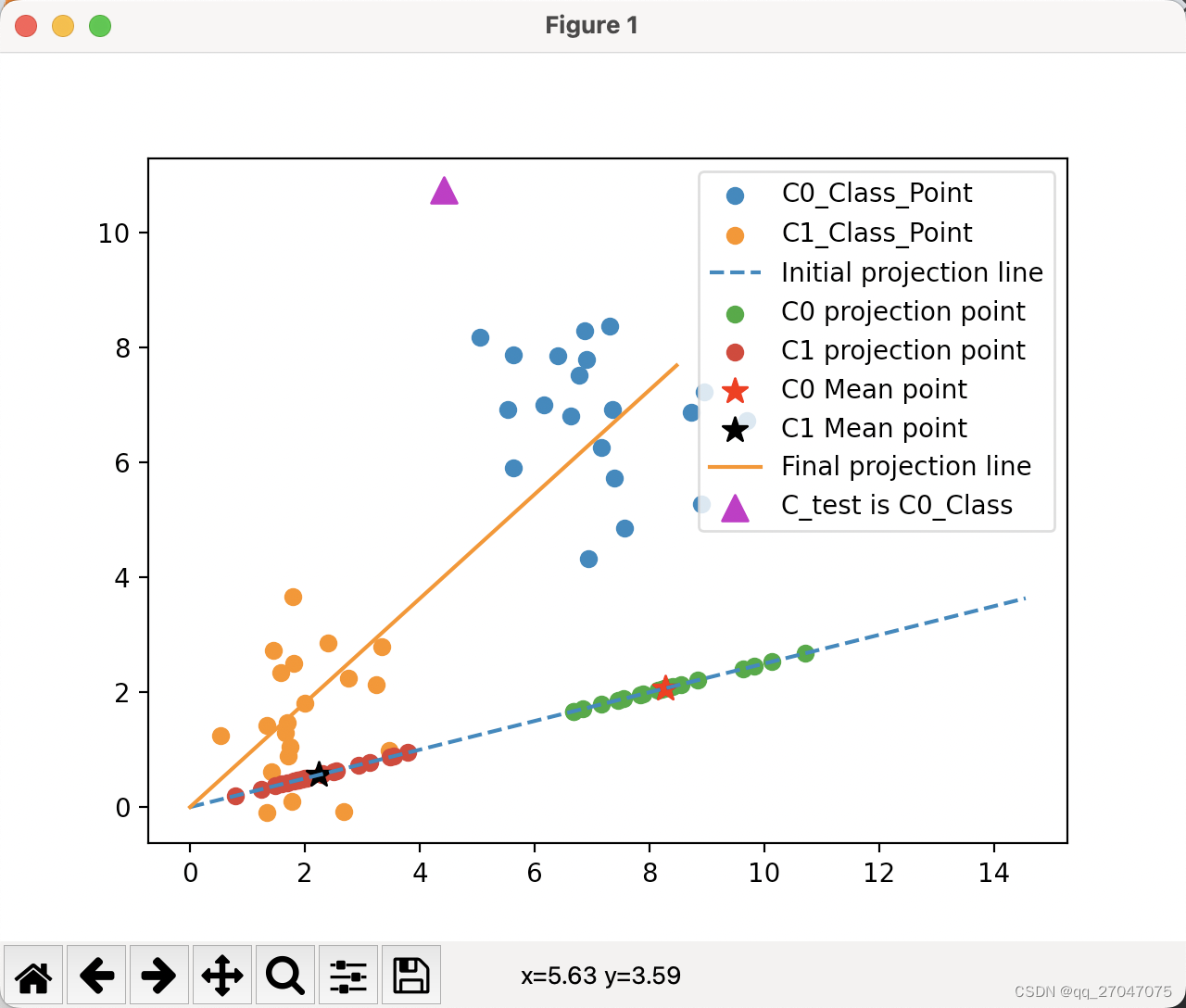
第三章 线性判别 -基于(二维向量投影)
完整代码如下: import numpy as npimport matplotlib.pyplot as pltnp.random.seed(150)x1 = np.random.normal(7, 1, [20, 1])x2 = np.random.normal(7, 1, [20, 1])C0 = np.concatenate((x1, x2), axis=1).T
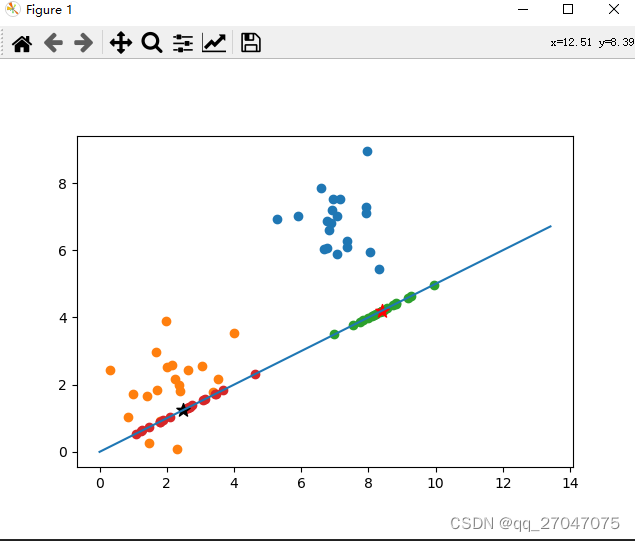
第三章 线性判别 -二维向量投影
计算二维平面上的点到某向量w上的投影点。 import numpy as npimport matplotlib.pyplot as pltx1=np.random.normal(7,1,[20,1])x2=np.random.normal(7,1,[20,1])C0=np.concatenate((x1,x2),axis=1).T #C0类x1=np.random.norm
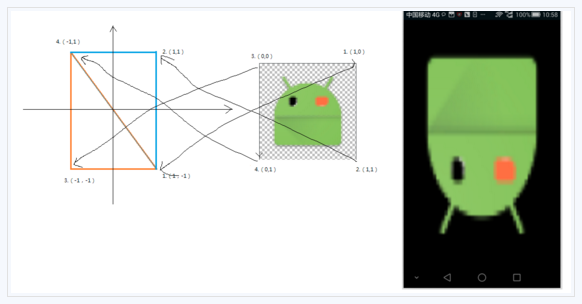
OpenGLES Android篇零基础系列(二):OpenGL各坐标系及模型矩阵(ModelViewMatrix),投影矩阵(ProjectionMatrix)等的深入理解
上一篇我们粗略的介绍了下GLES20 中 GLSurfaceView以及Render接口的使用。 对于三角形顶点坐标的定义并没有做出注释,其实在官方的ApiDemo中,它也是赤裸裸的,一个注释都没有,且代码写得一点都不敢恭维,不知道那位同行现在是不是还在google里面。下面贴出一小段官方的ApiDemo中的代码,一起鉴赏鉴赏: private static final int FLOAT_
使用ArcGIS进行椭球转换和投影转换以及小范围内平移比较
在ArcGIS10.2 的ArcTools/Data Management Tools/Projections and Transformations/CreateCustomGeoTransformation可以自定义椭球转换参数,可以选用CoordFrame(七参数)或者GeoCentric_Translation(三参数) 设定好参数以后就可以转换了,选择一个Feature Clas