本文主要是介绍微分方程_by小崔说数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

可降解的微分方程
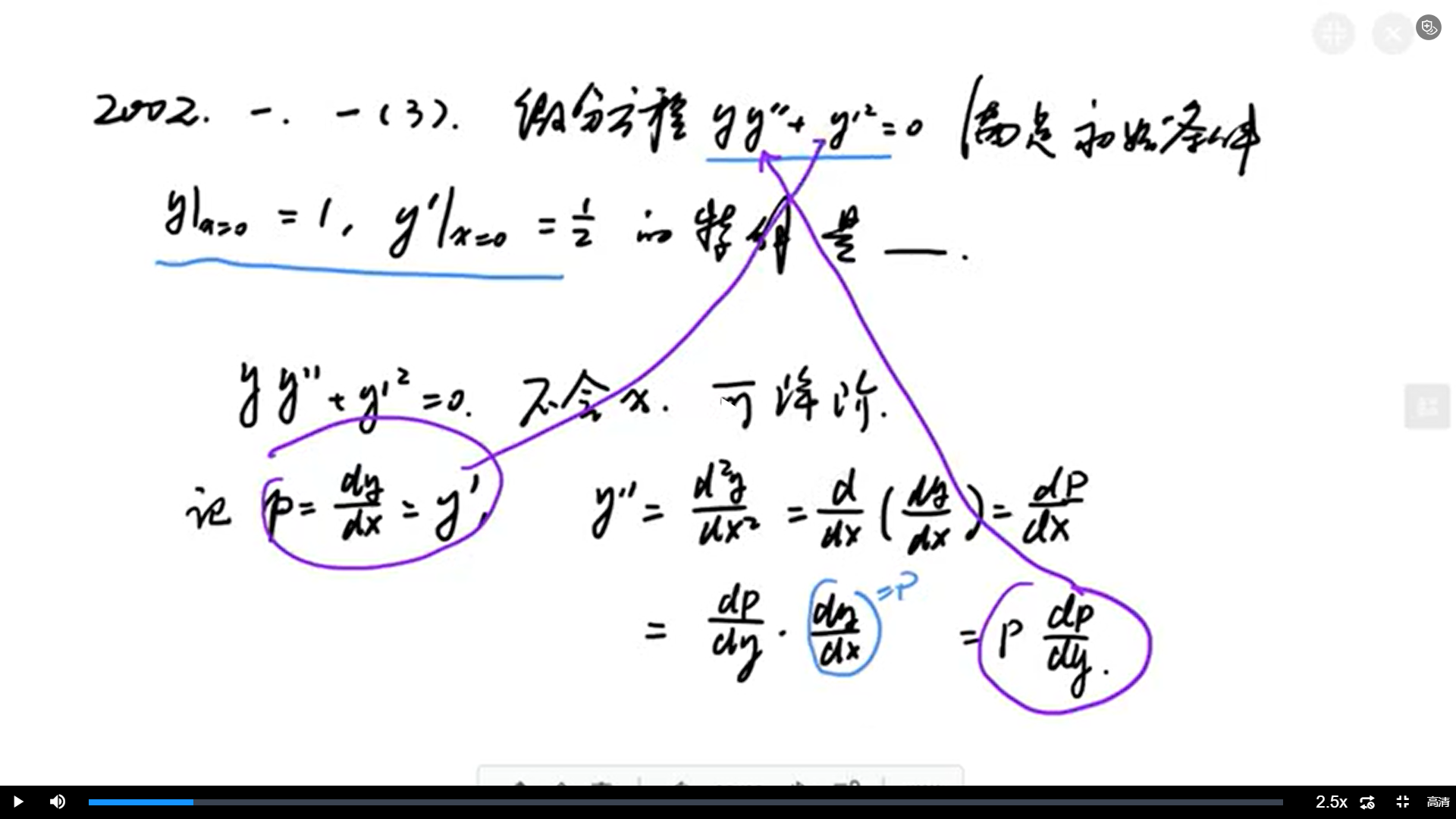
不显含x:y两撇=dp/dx=dp/dy*dy/dx
不显含y:dp/dx
都是y撇等于p

自变量与因变量呼唤
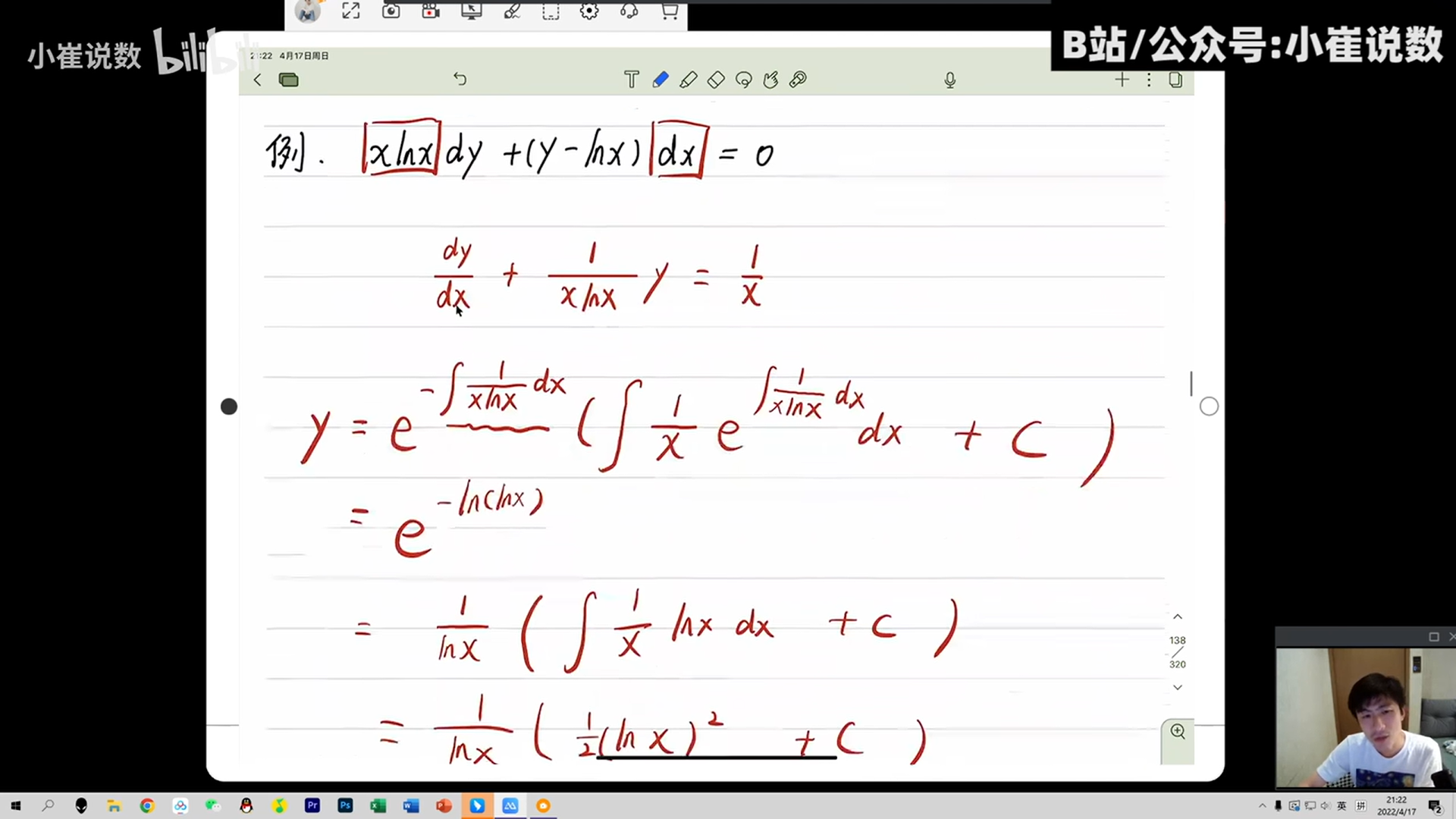
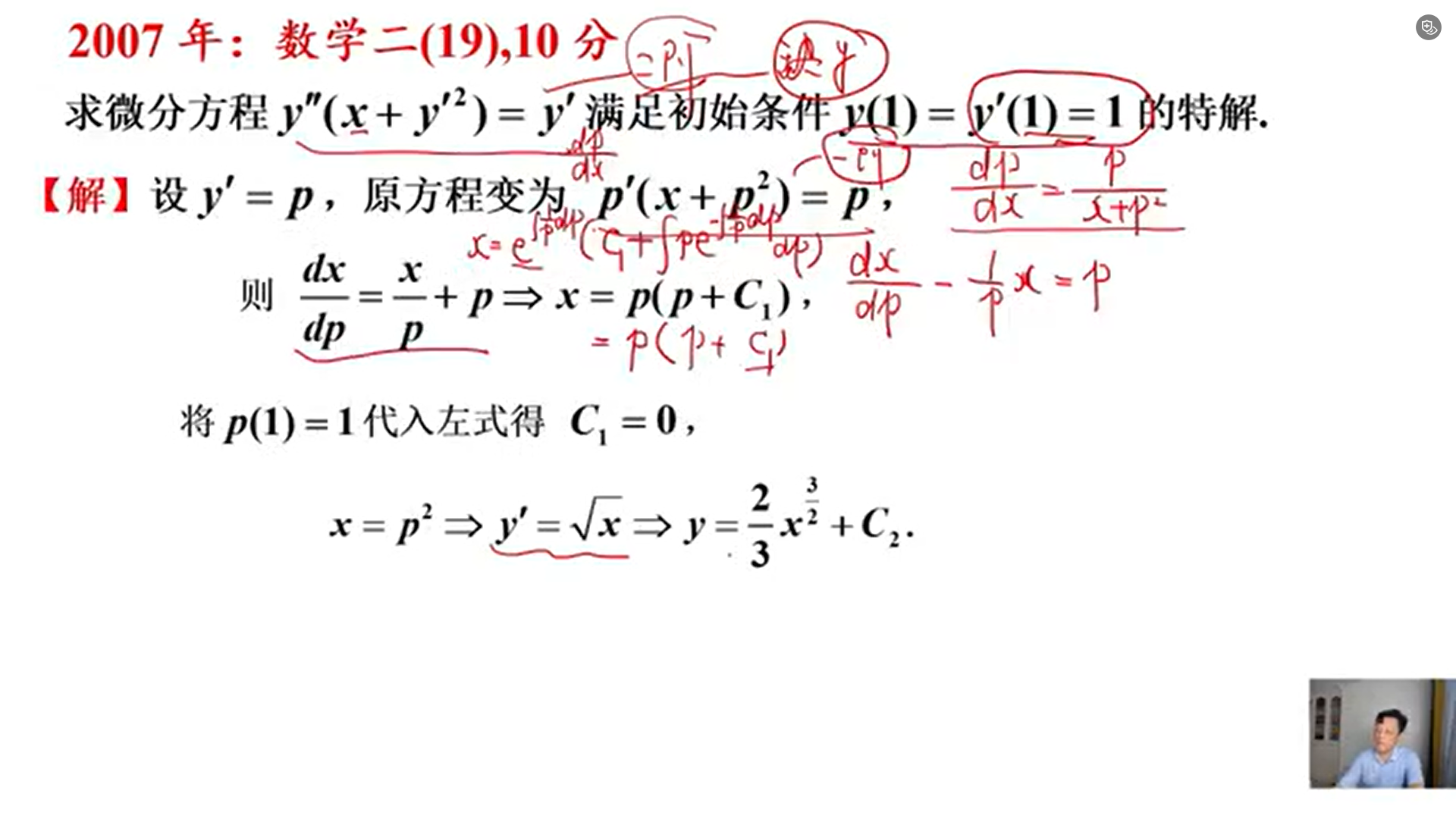
讲解为一阶线性微风方程
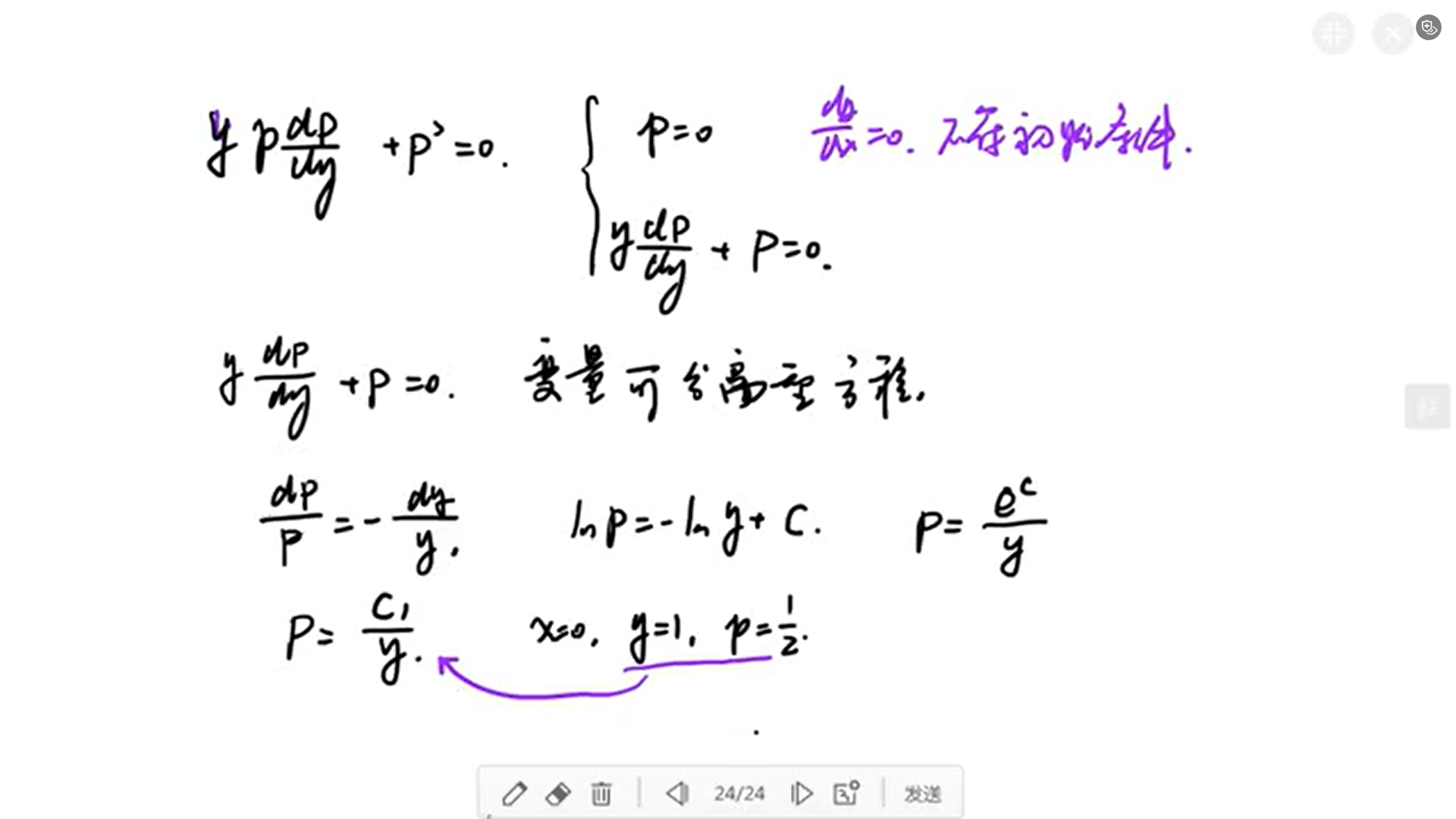
,变成可分离得
公式得

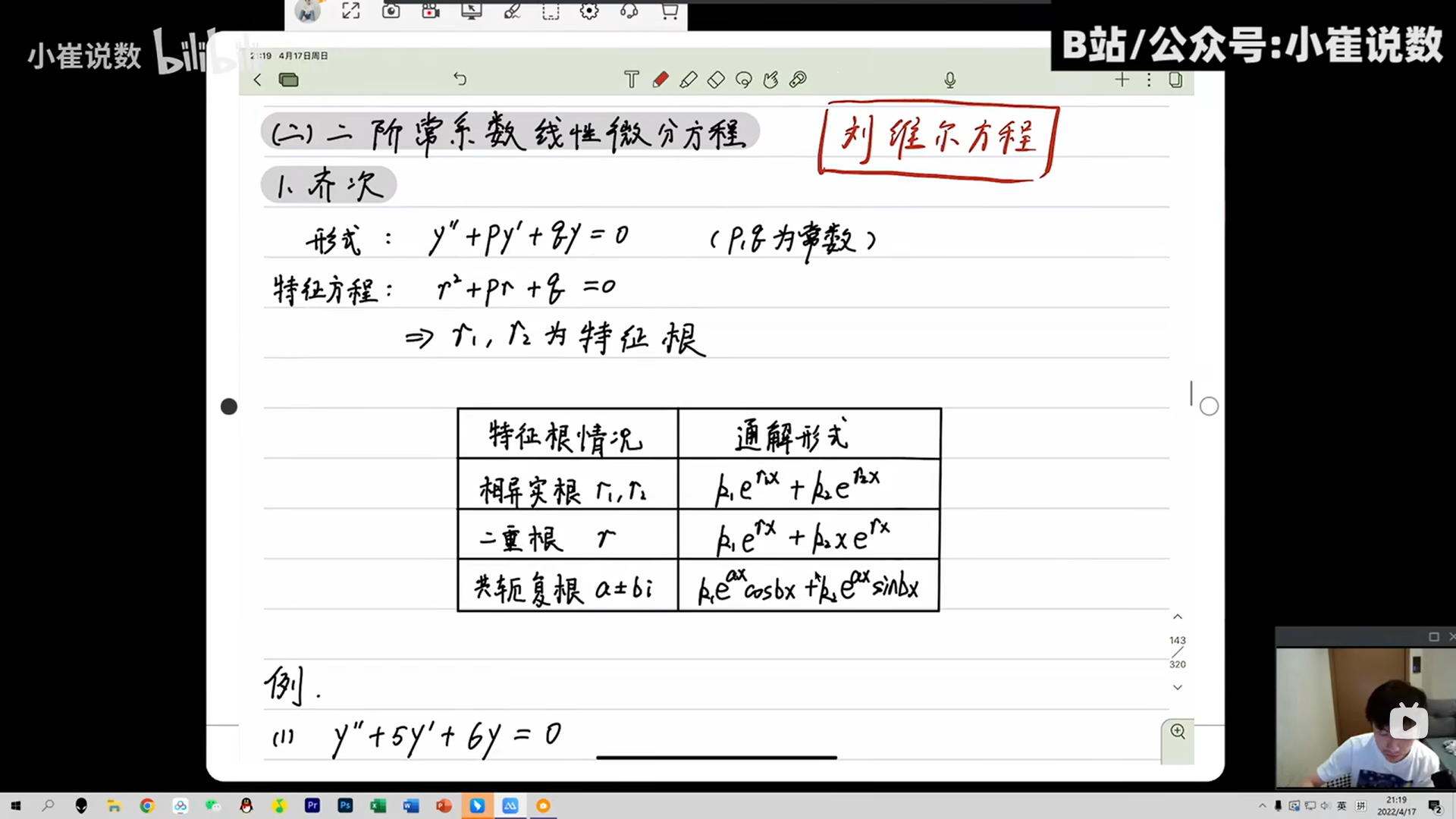
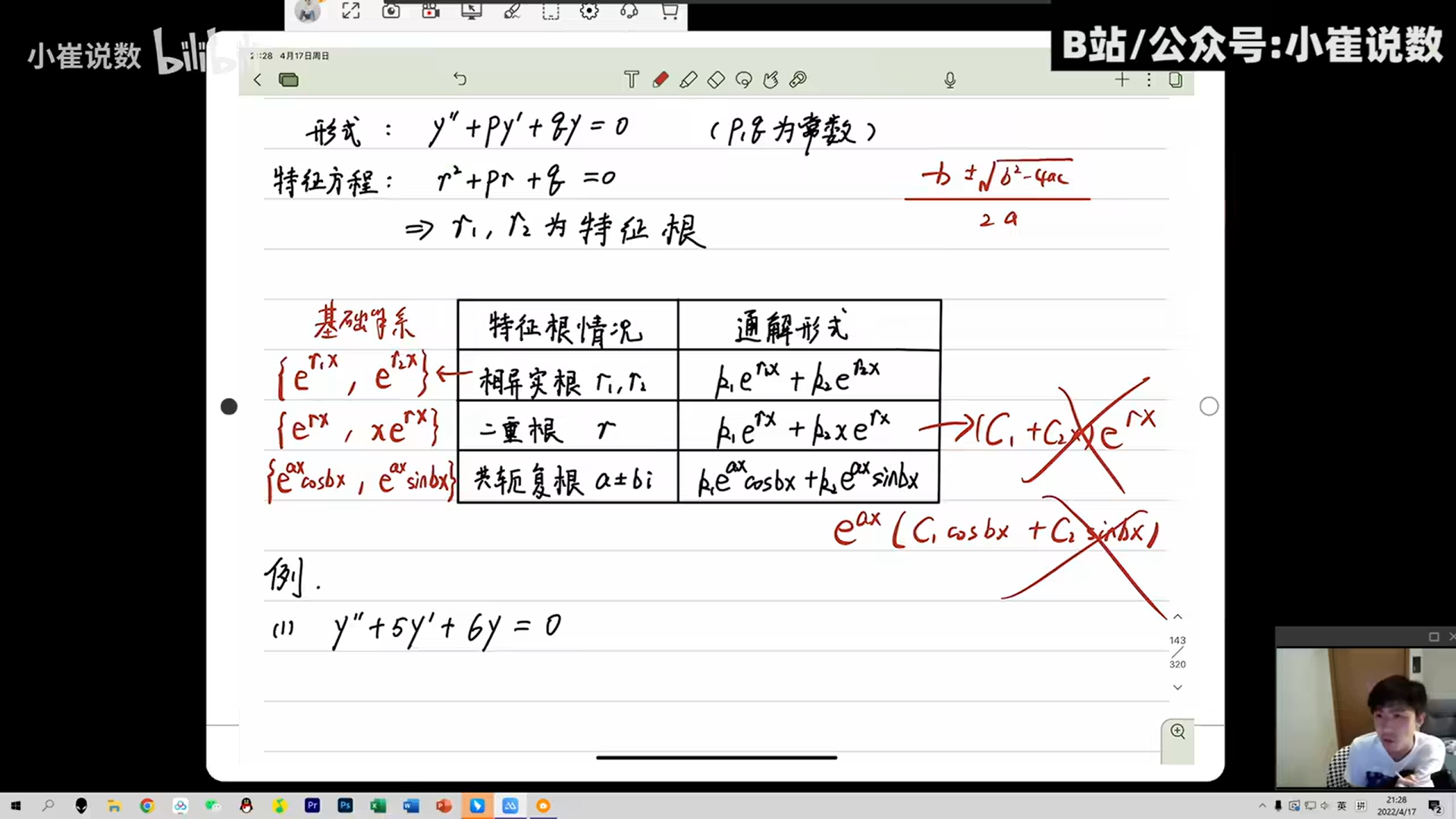
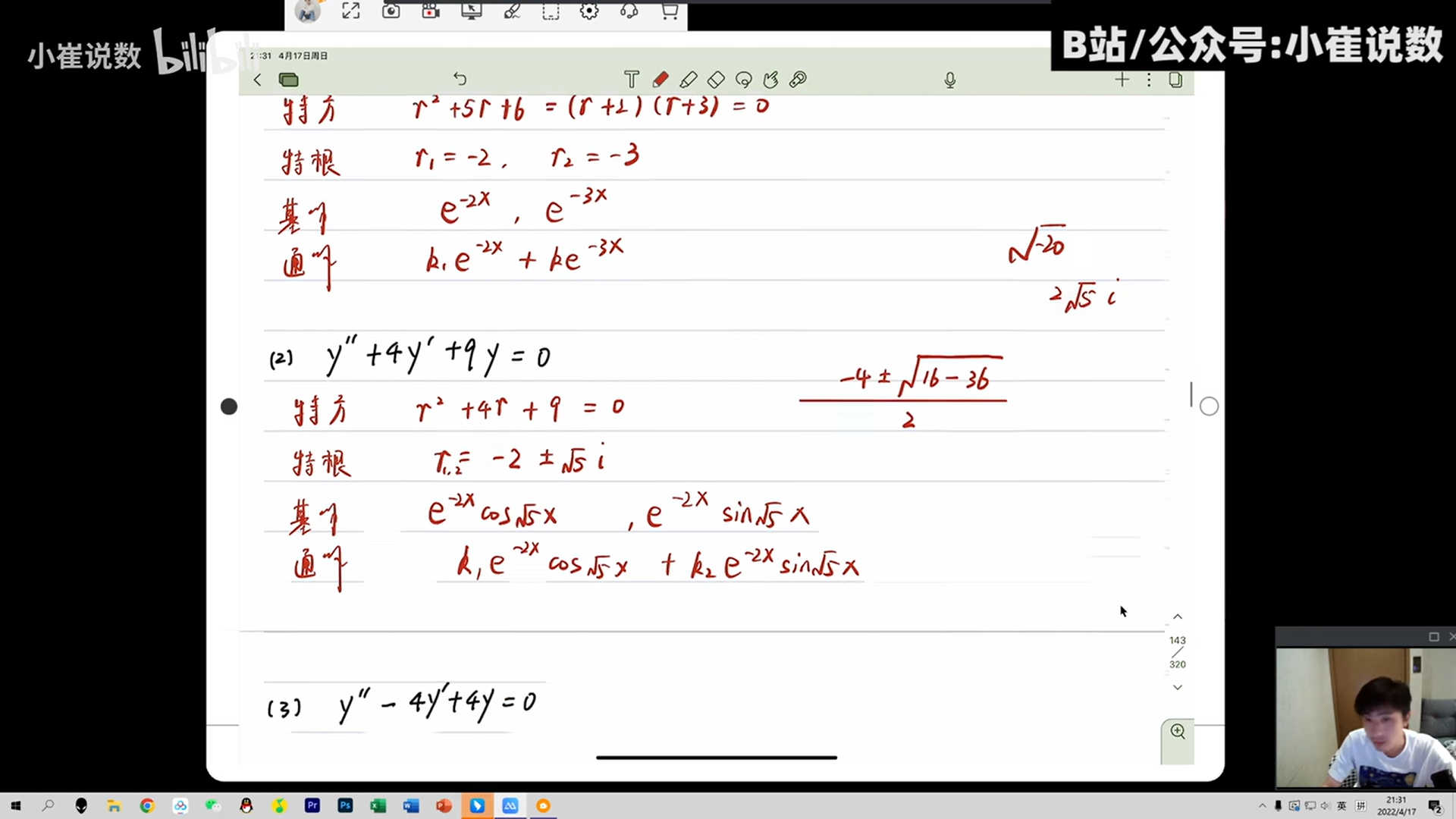
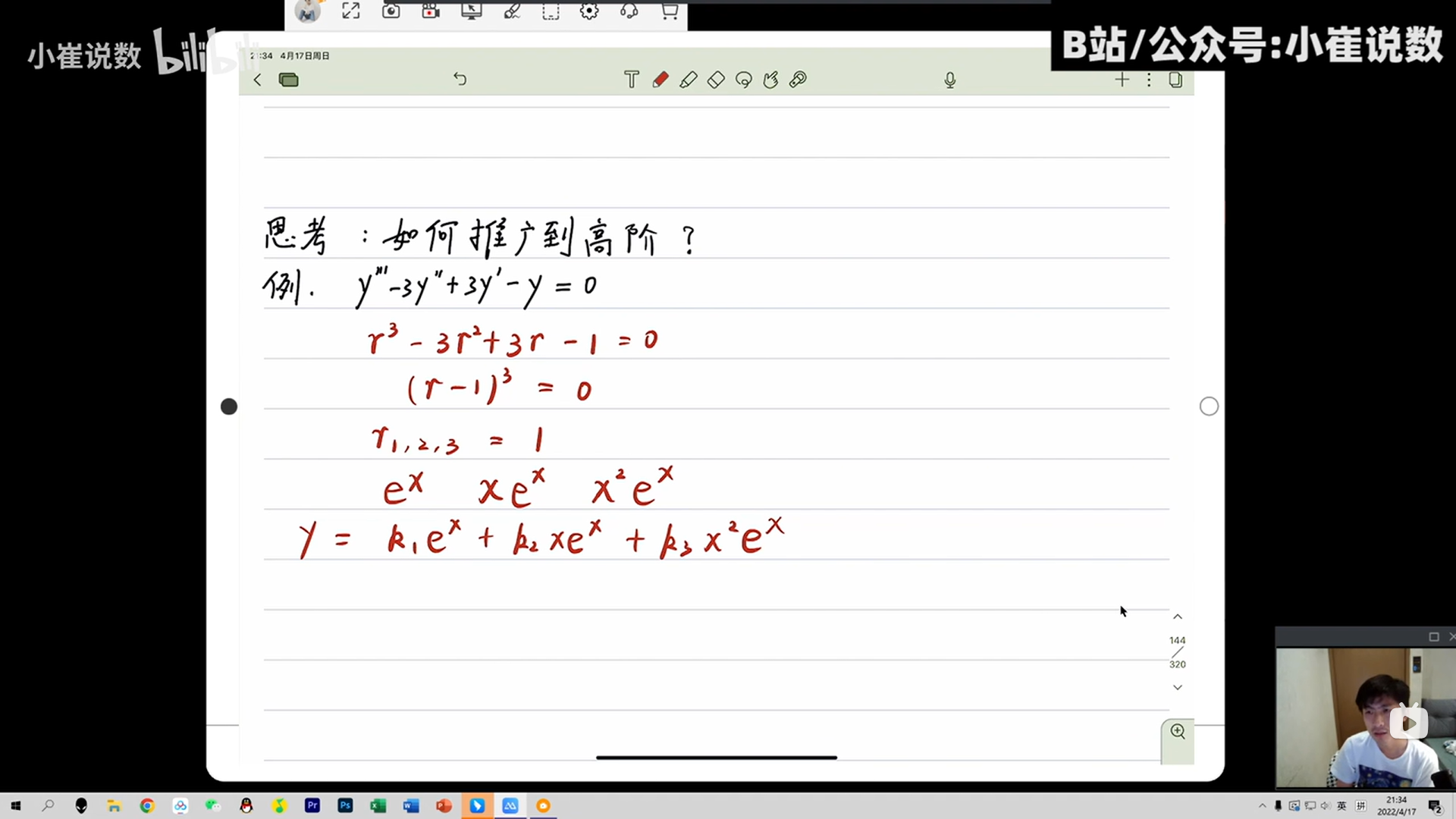
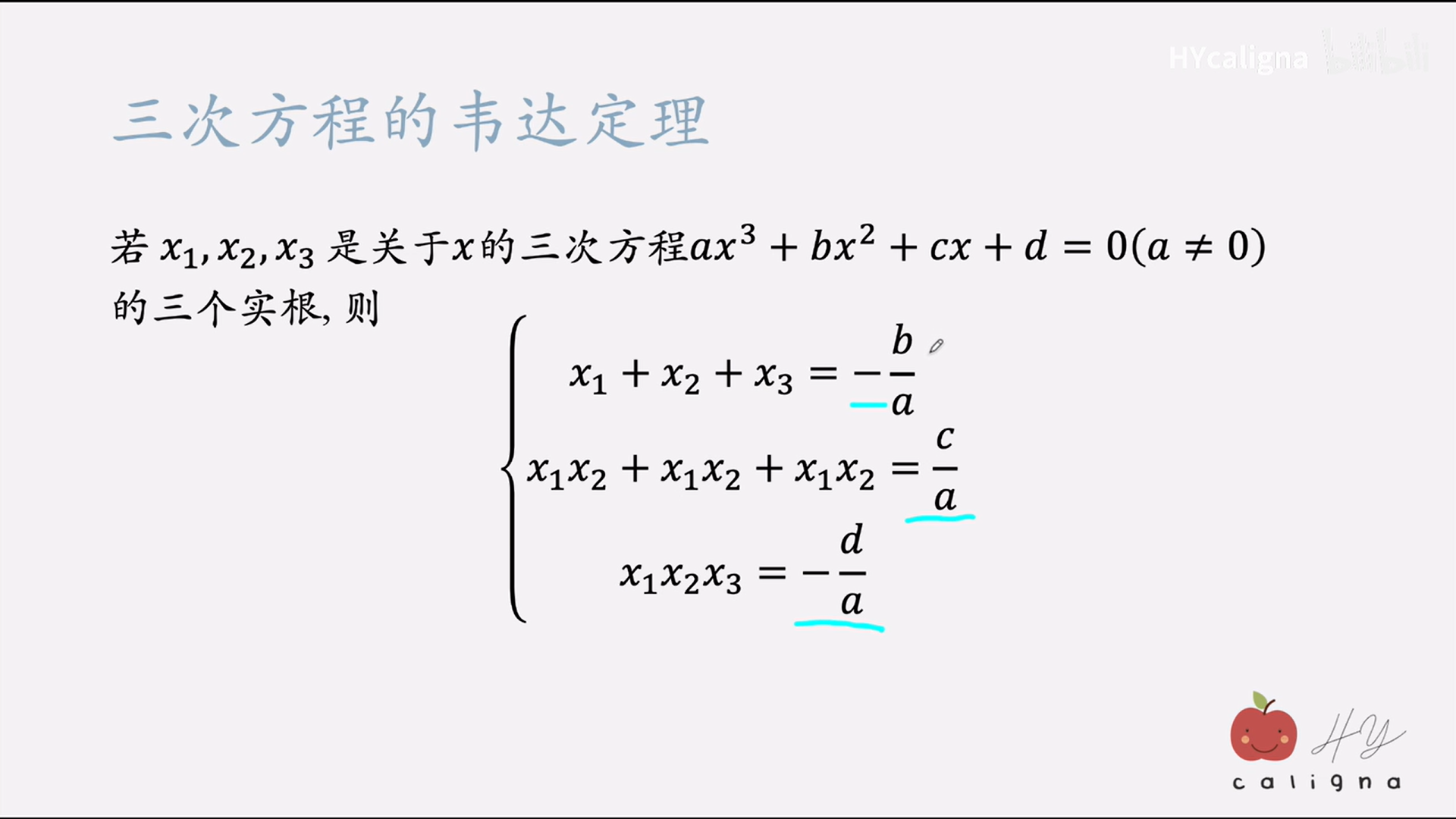
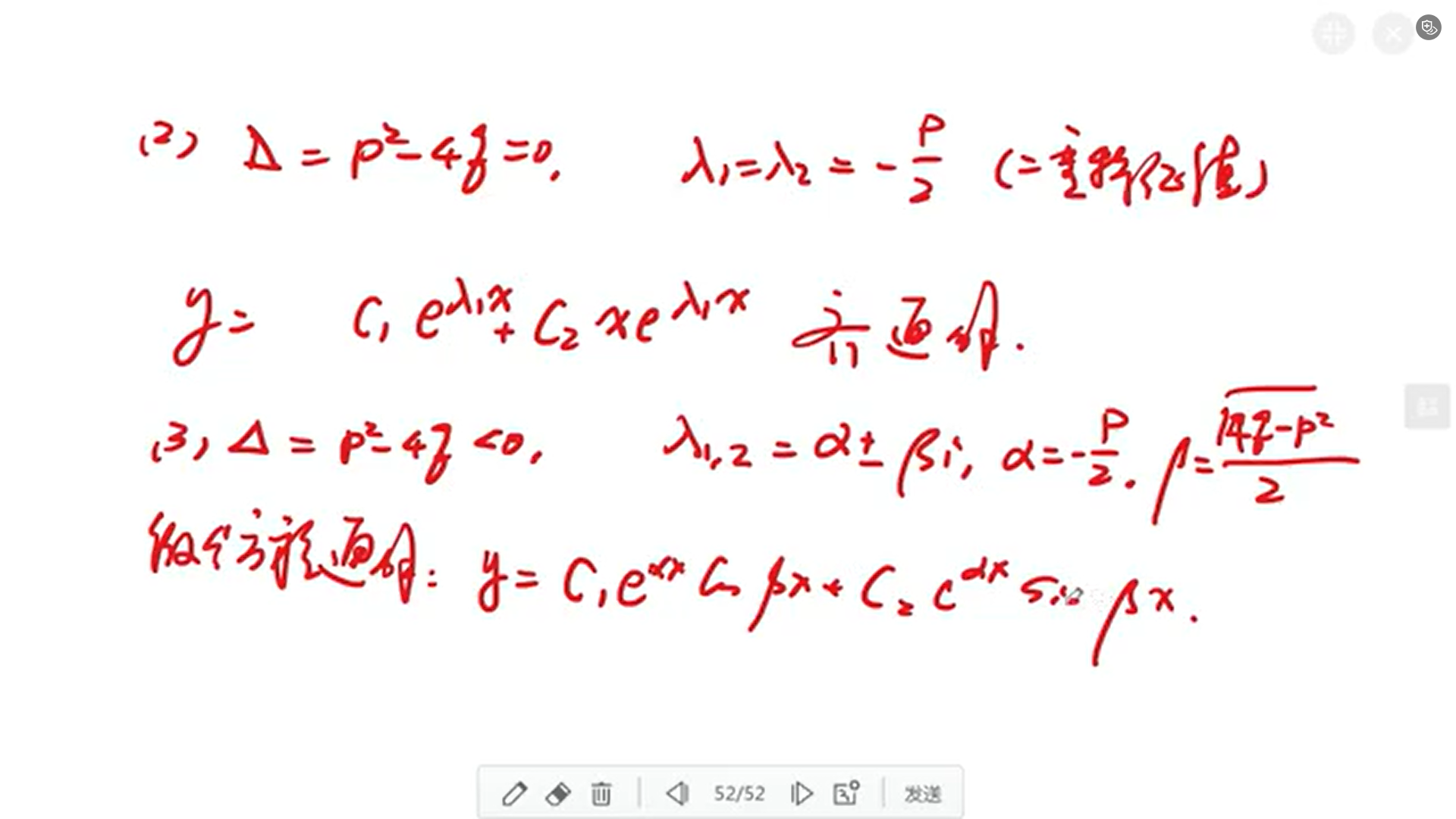
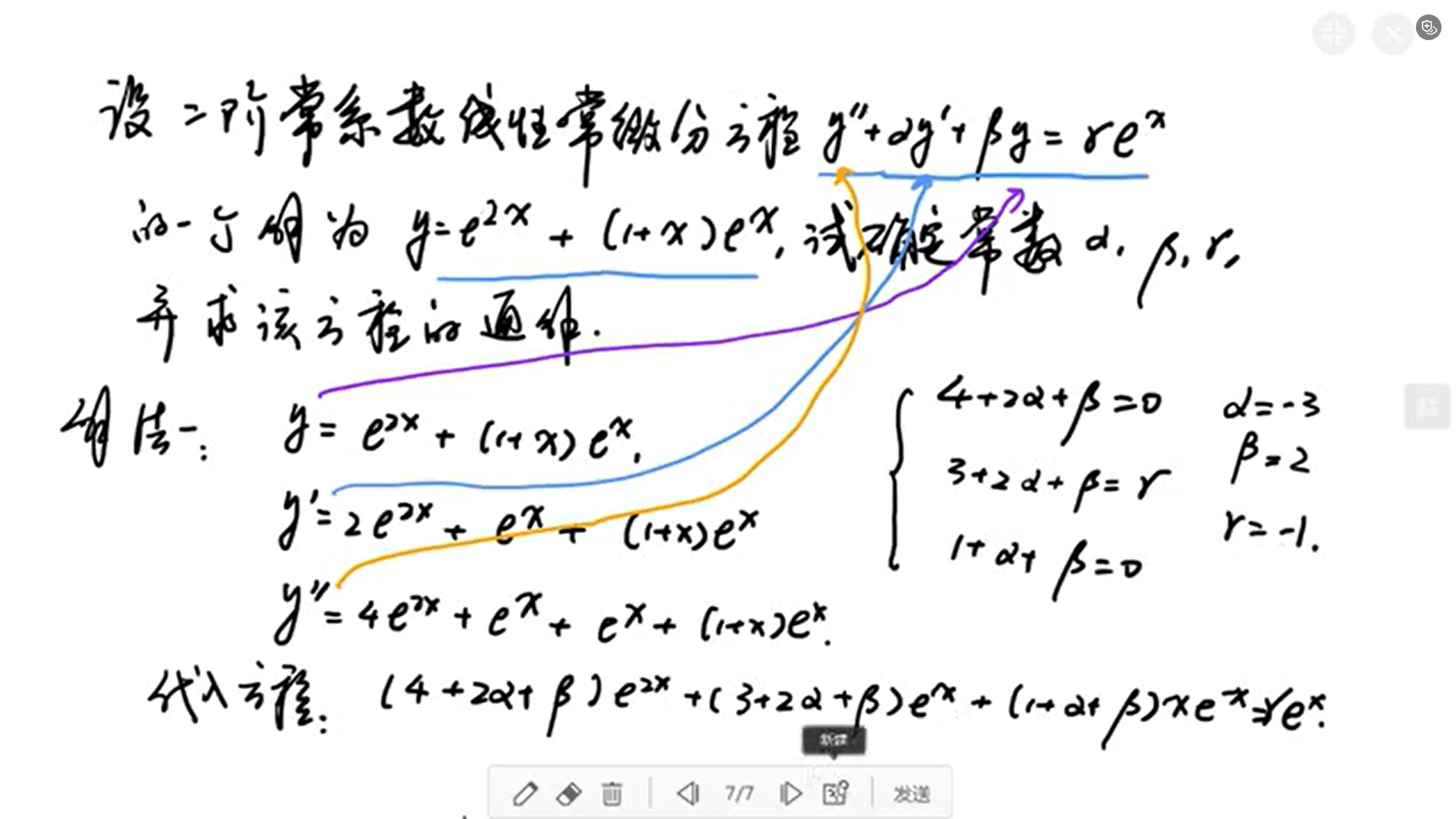
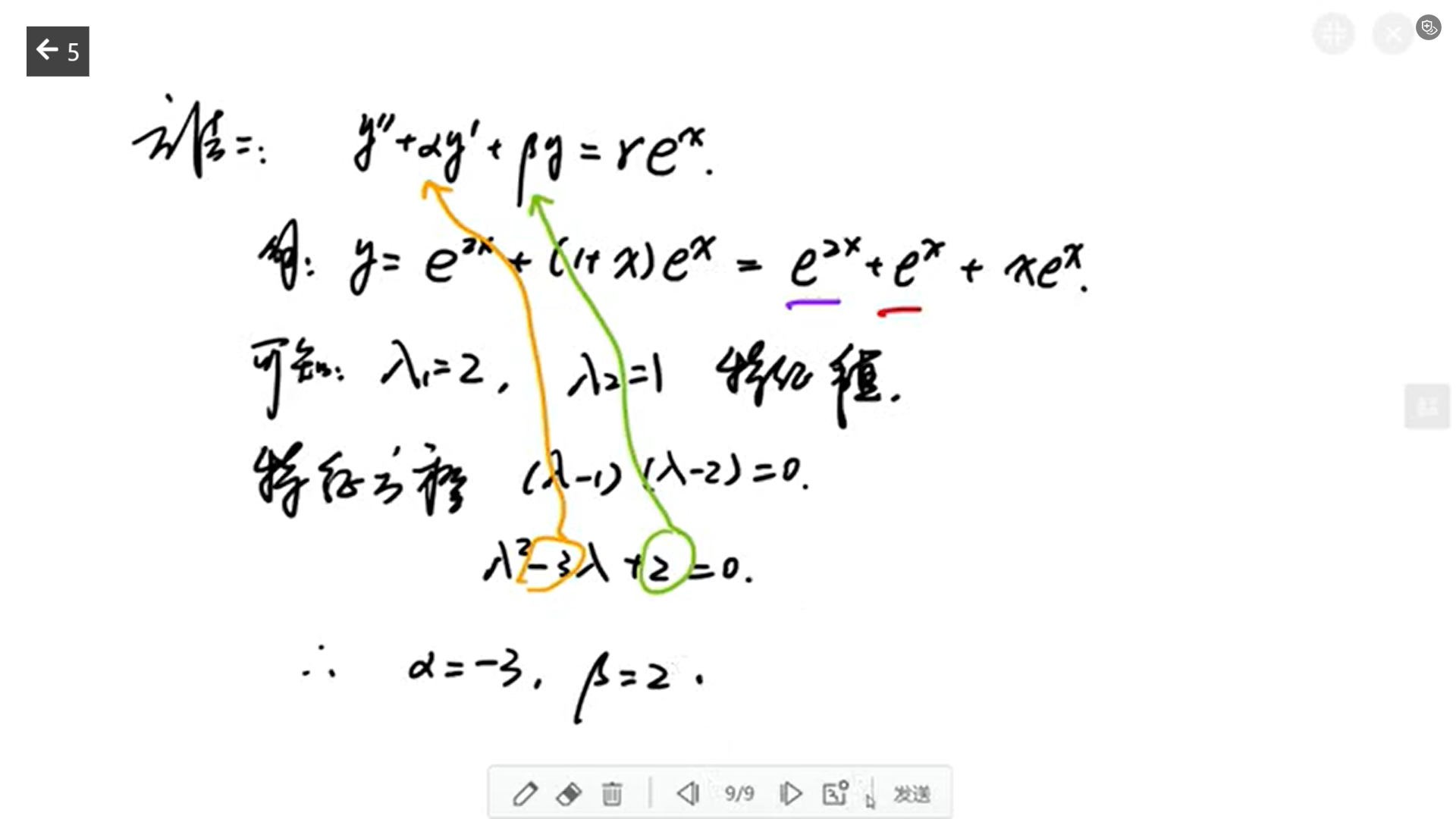
高阶可降解得微分方程
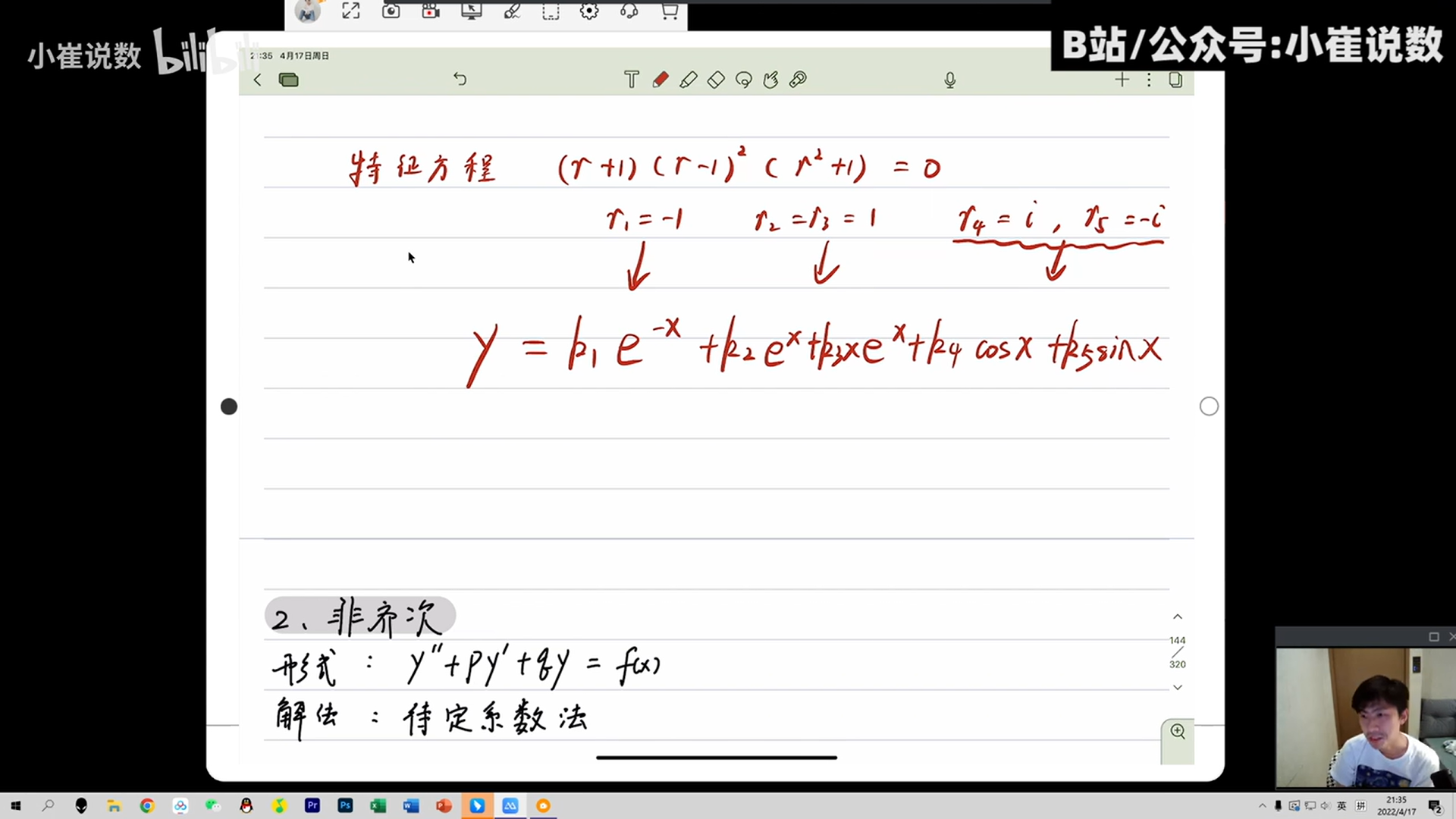
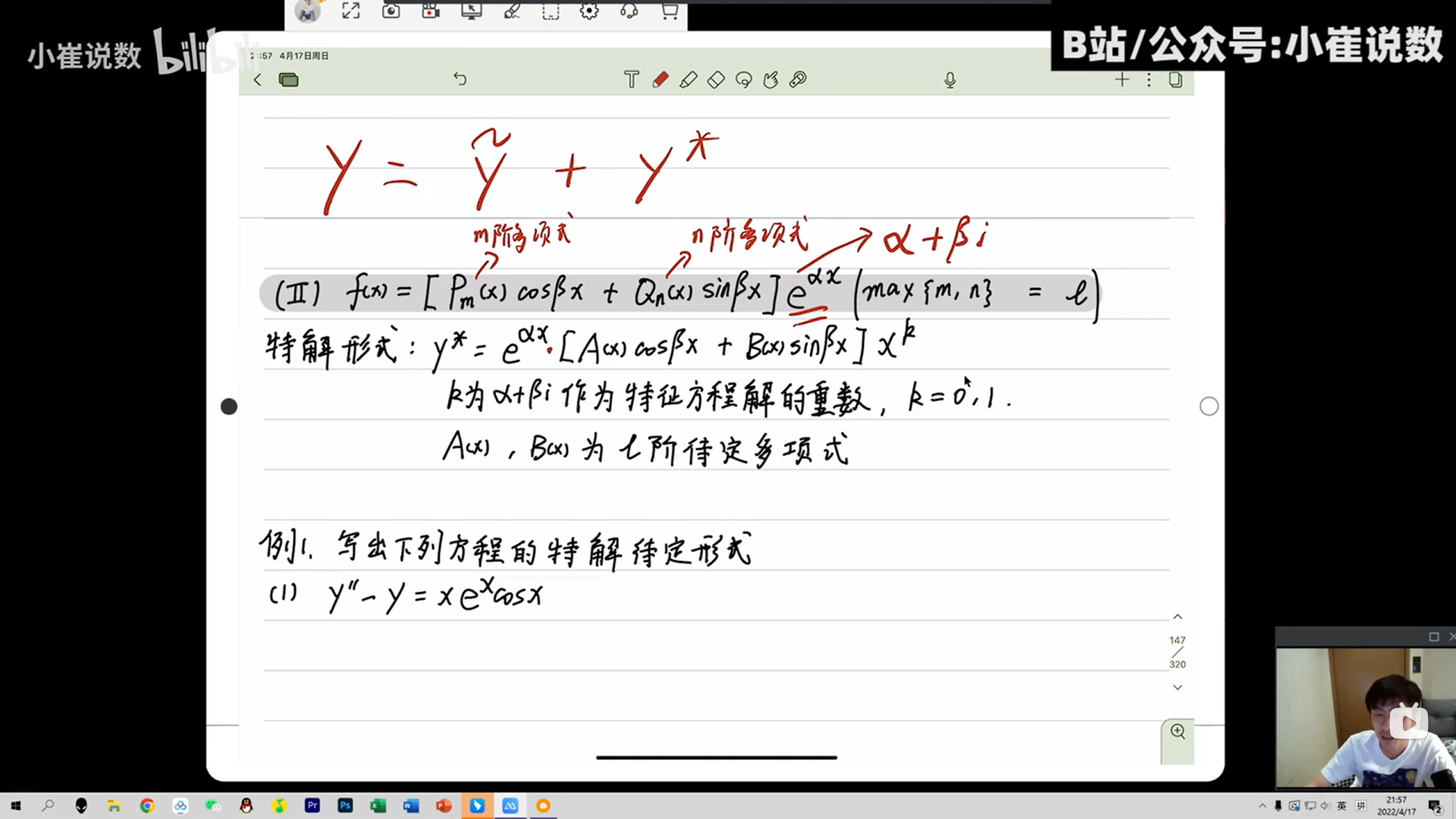
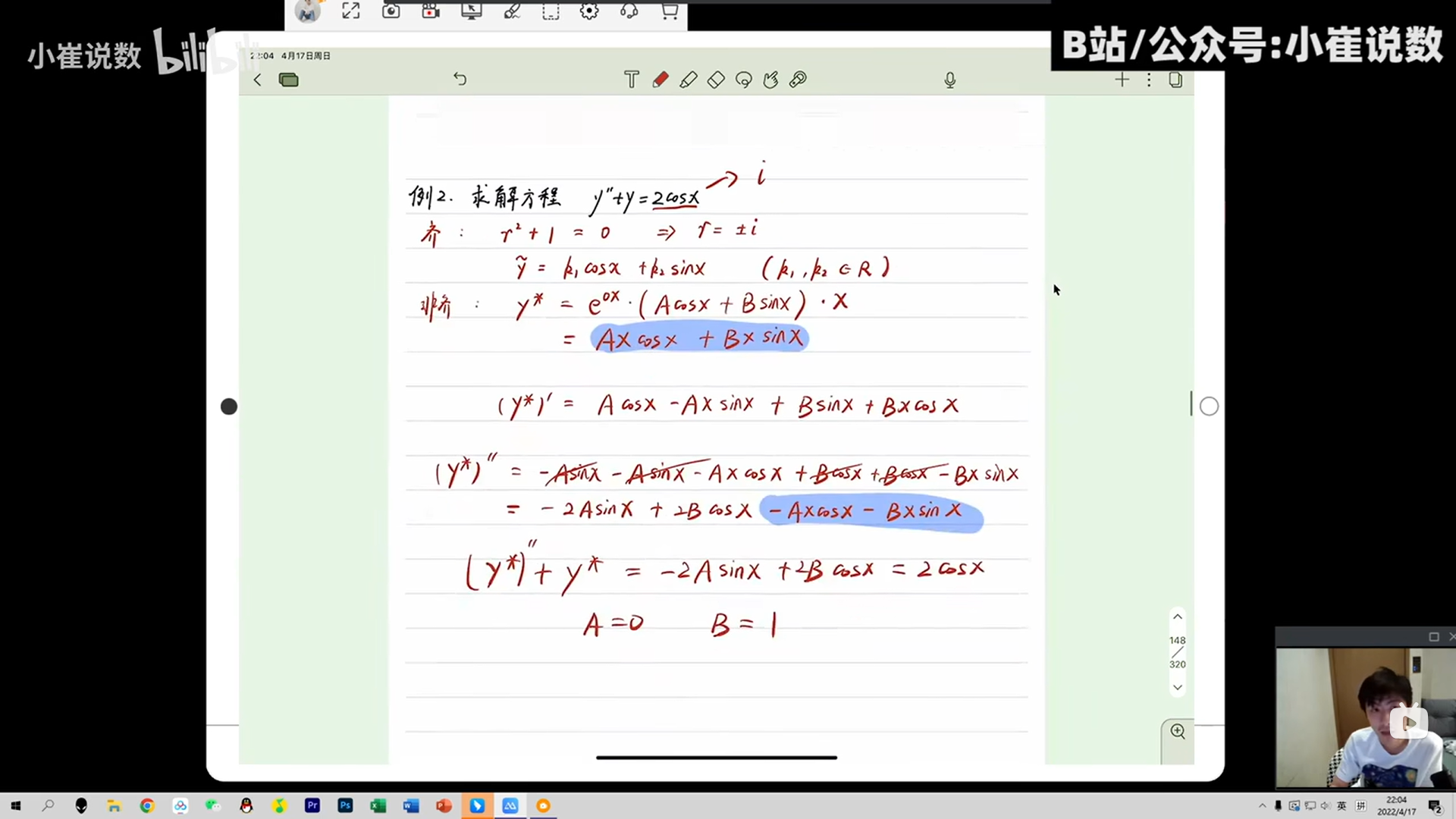
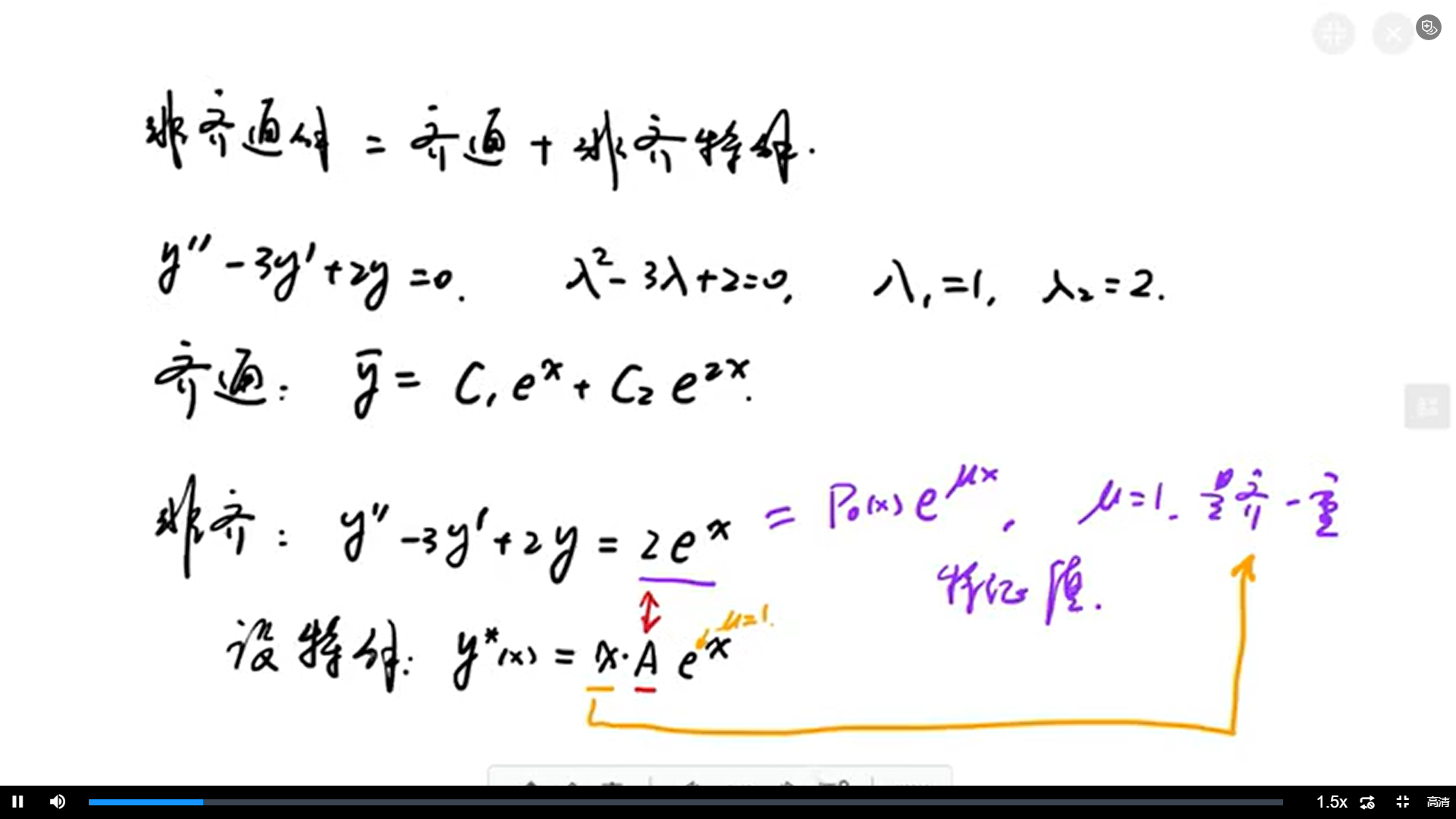
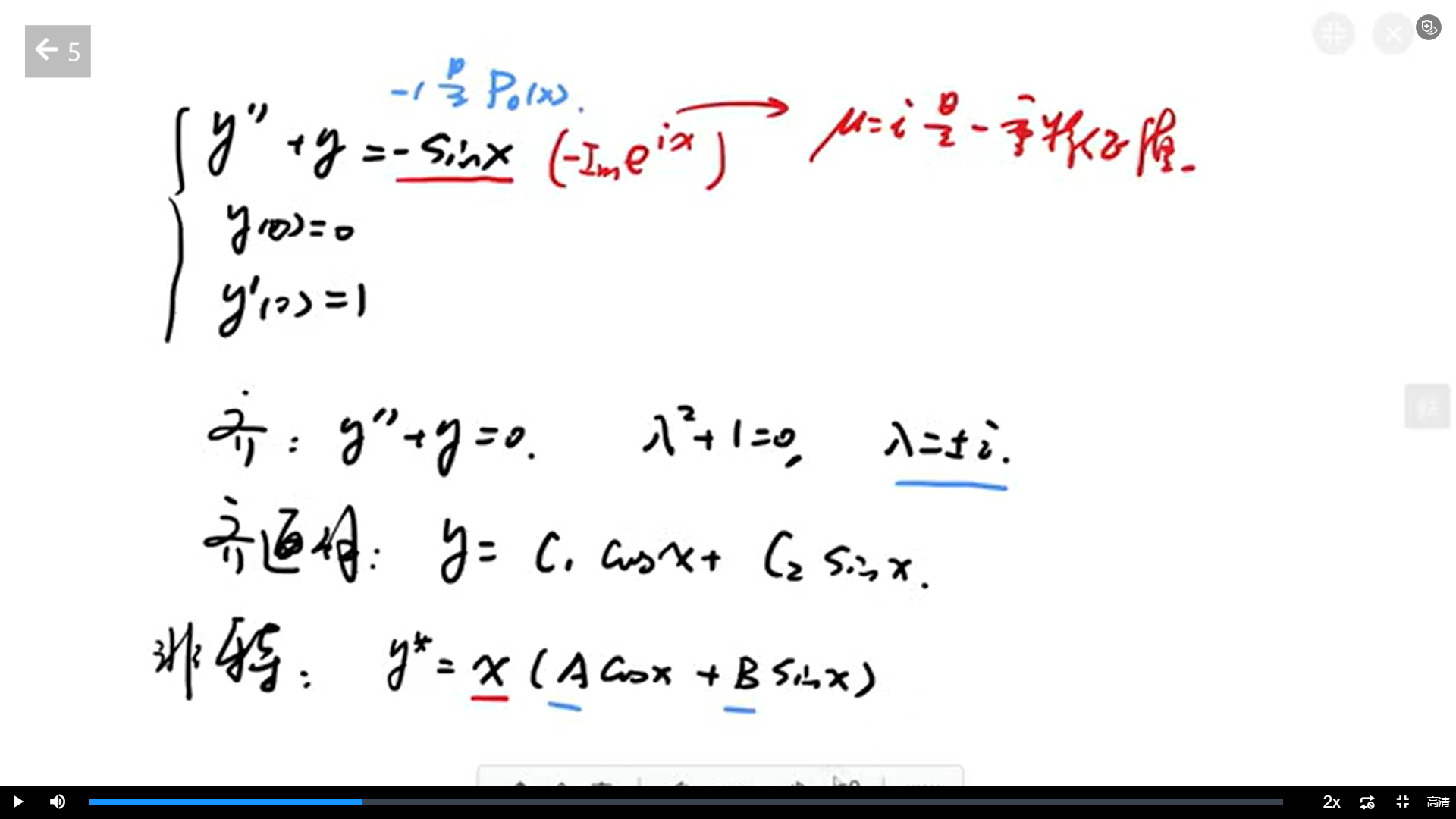
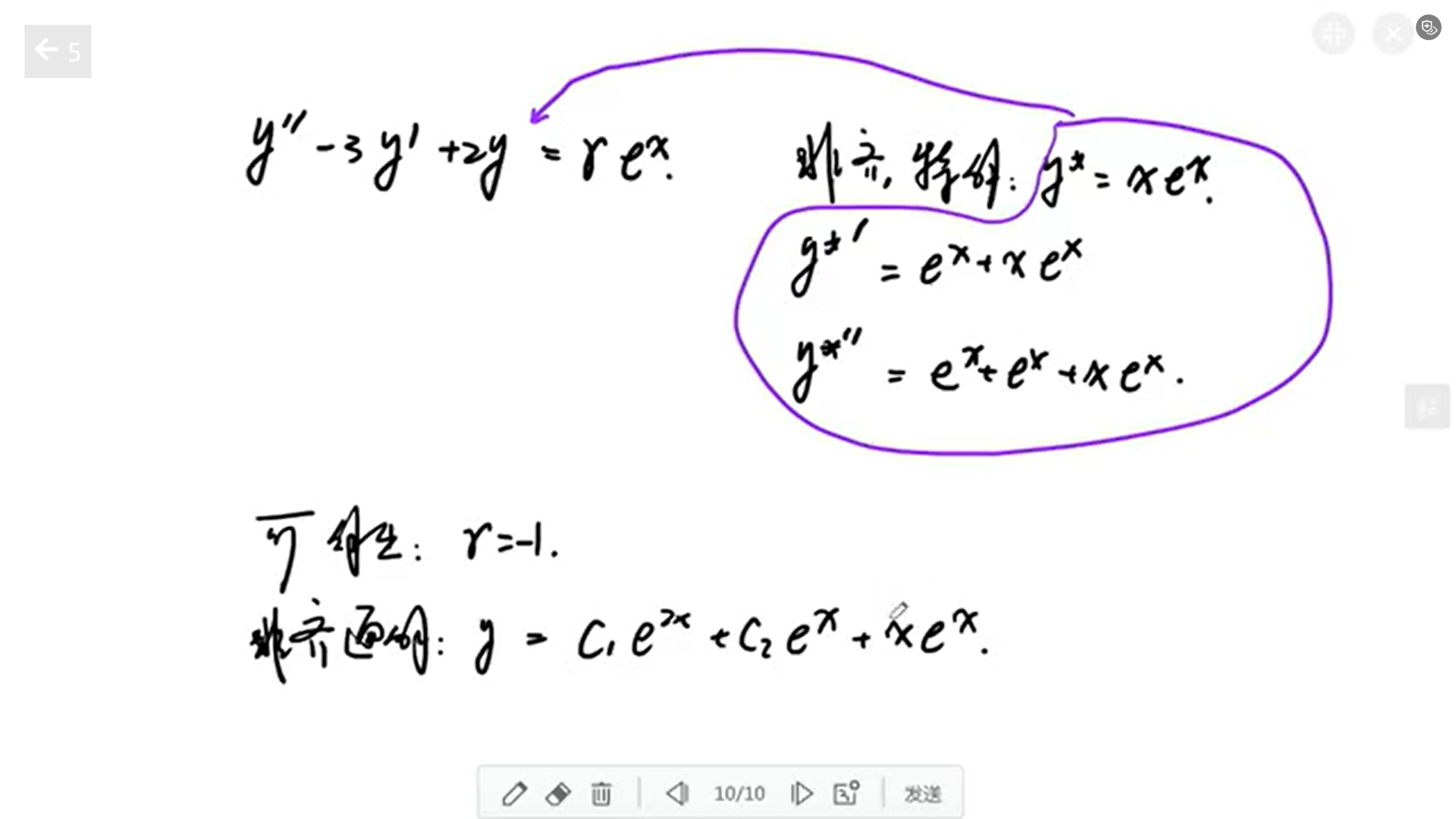
通解=非齐次特解+齐次通解
非齐次特解;解得叠加原理
就是特解得通世
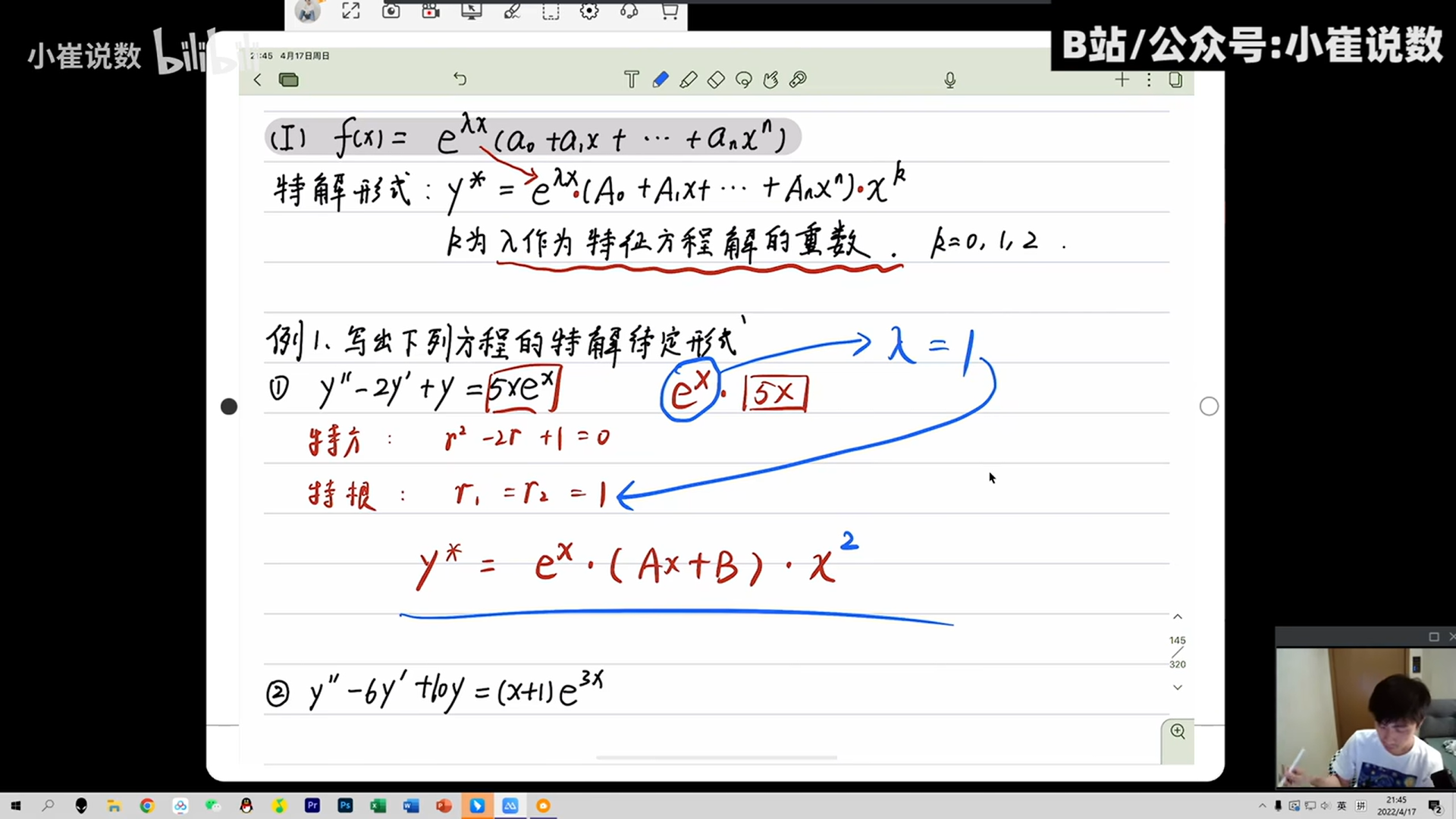
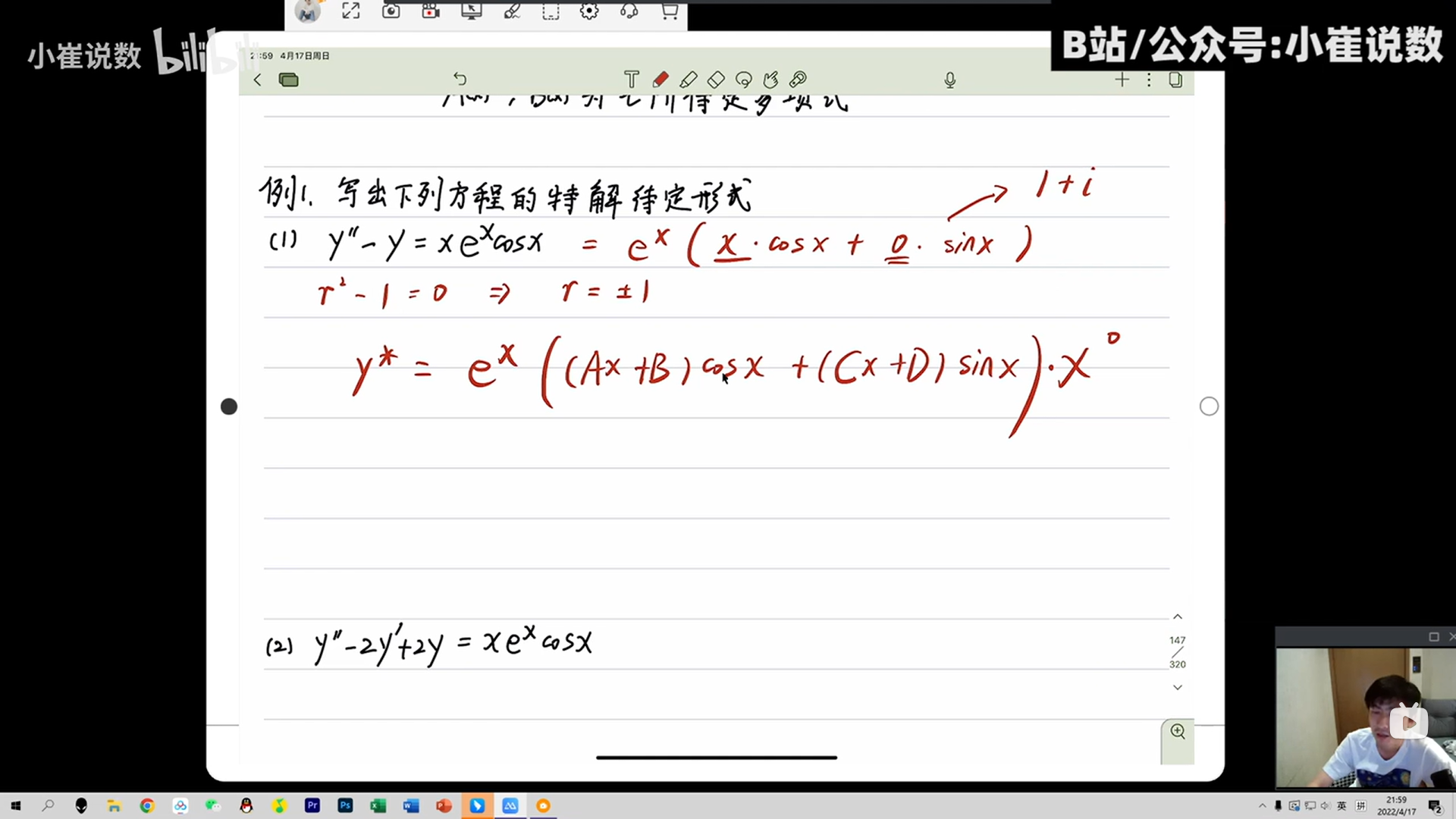
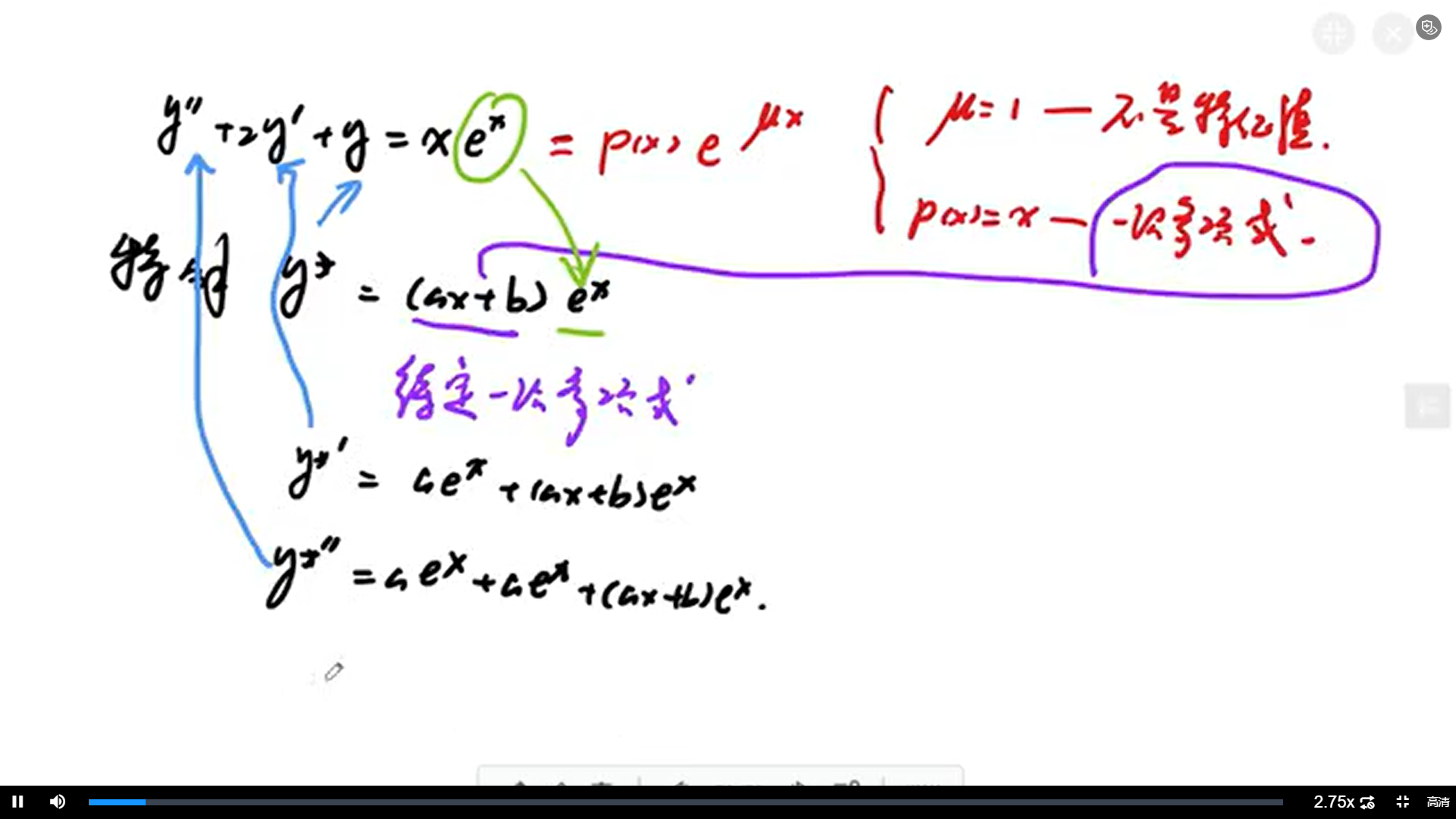
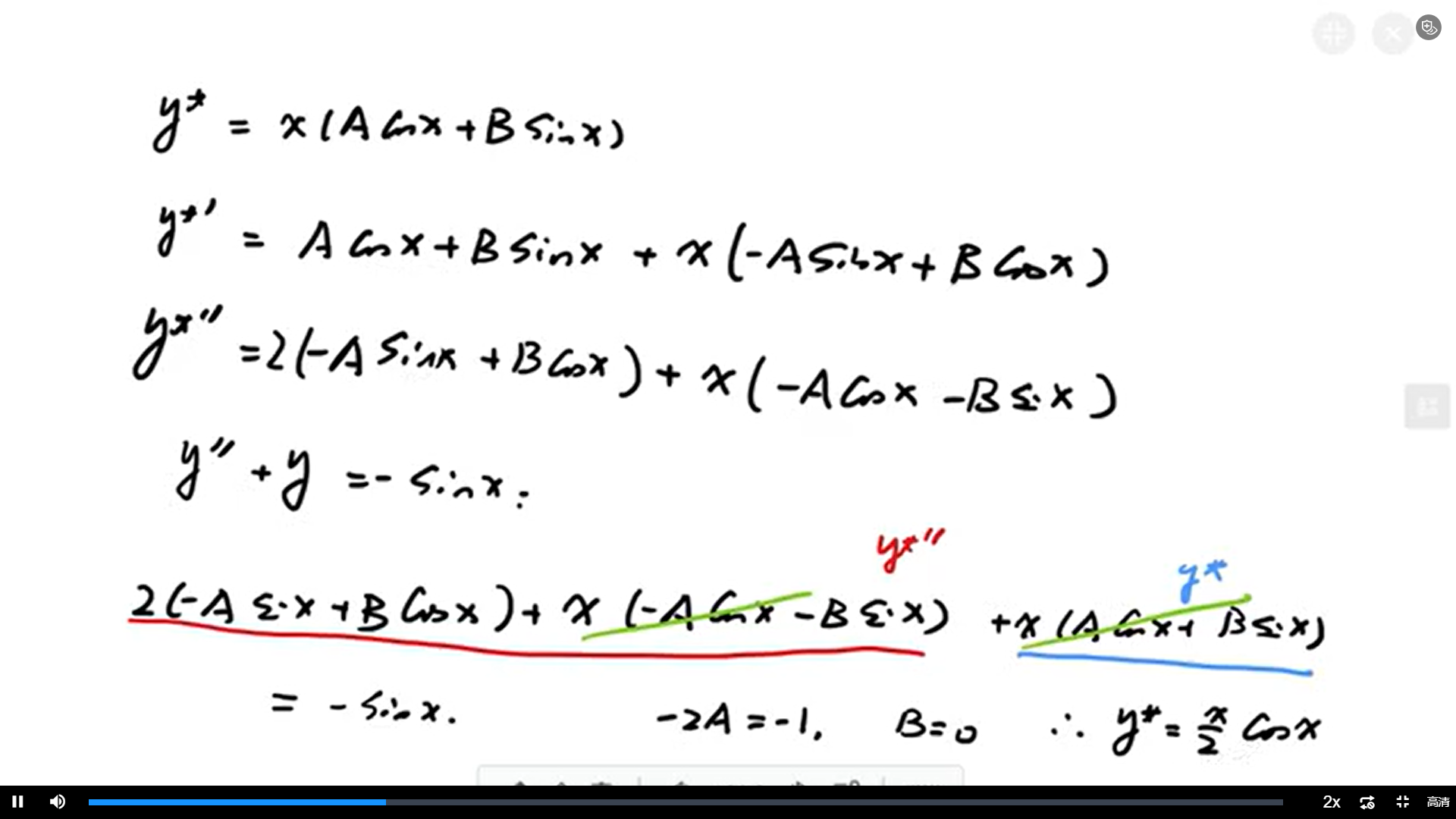
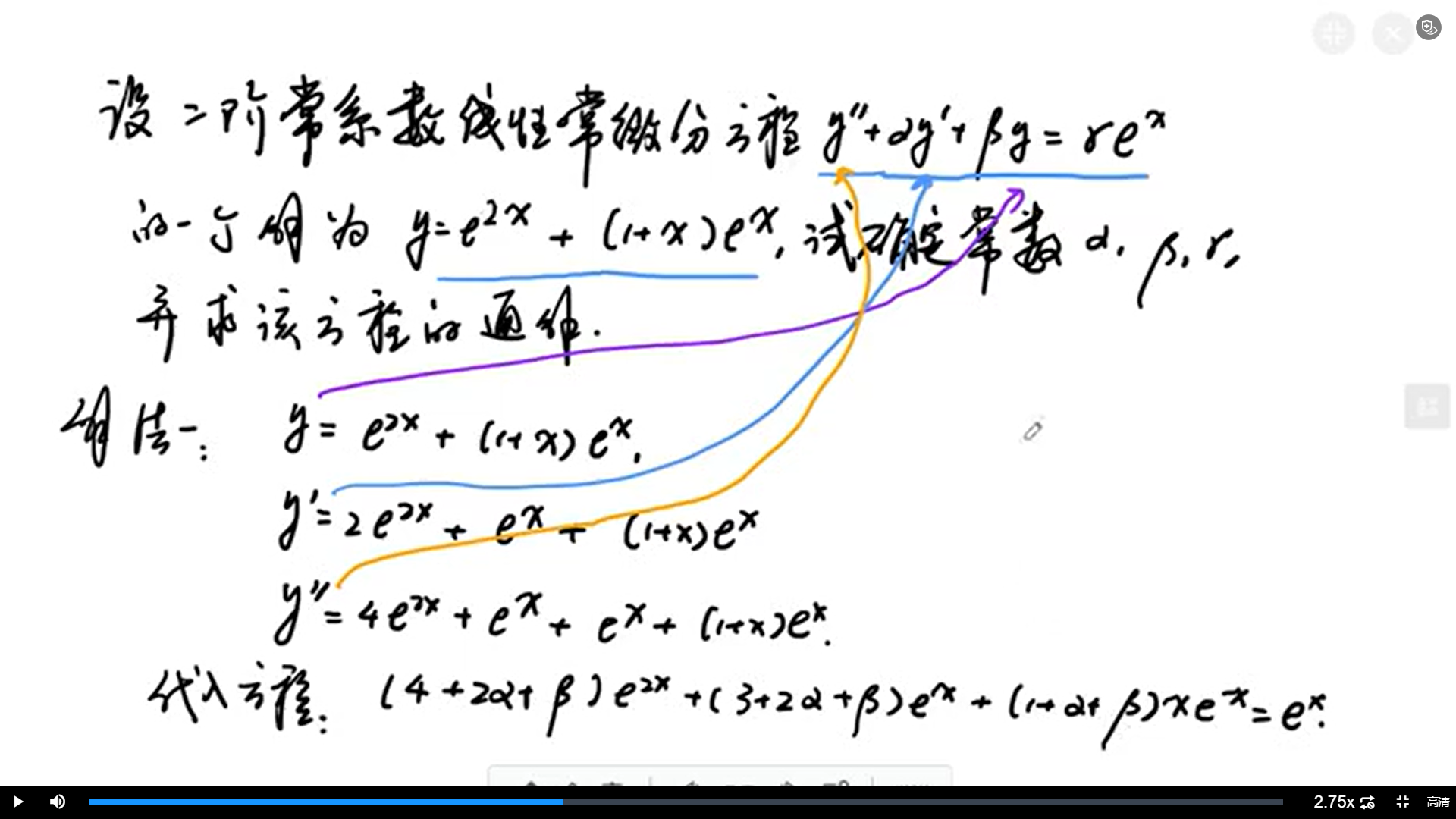
1、待定试
2、e的ax照抄
3、x的k次方
a是特征值的个数
a+bi是否等于特征值
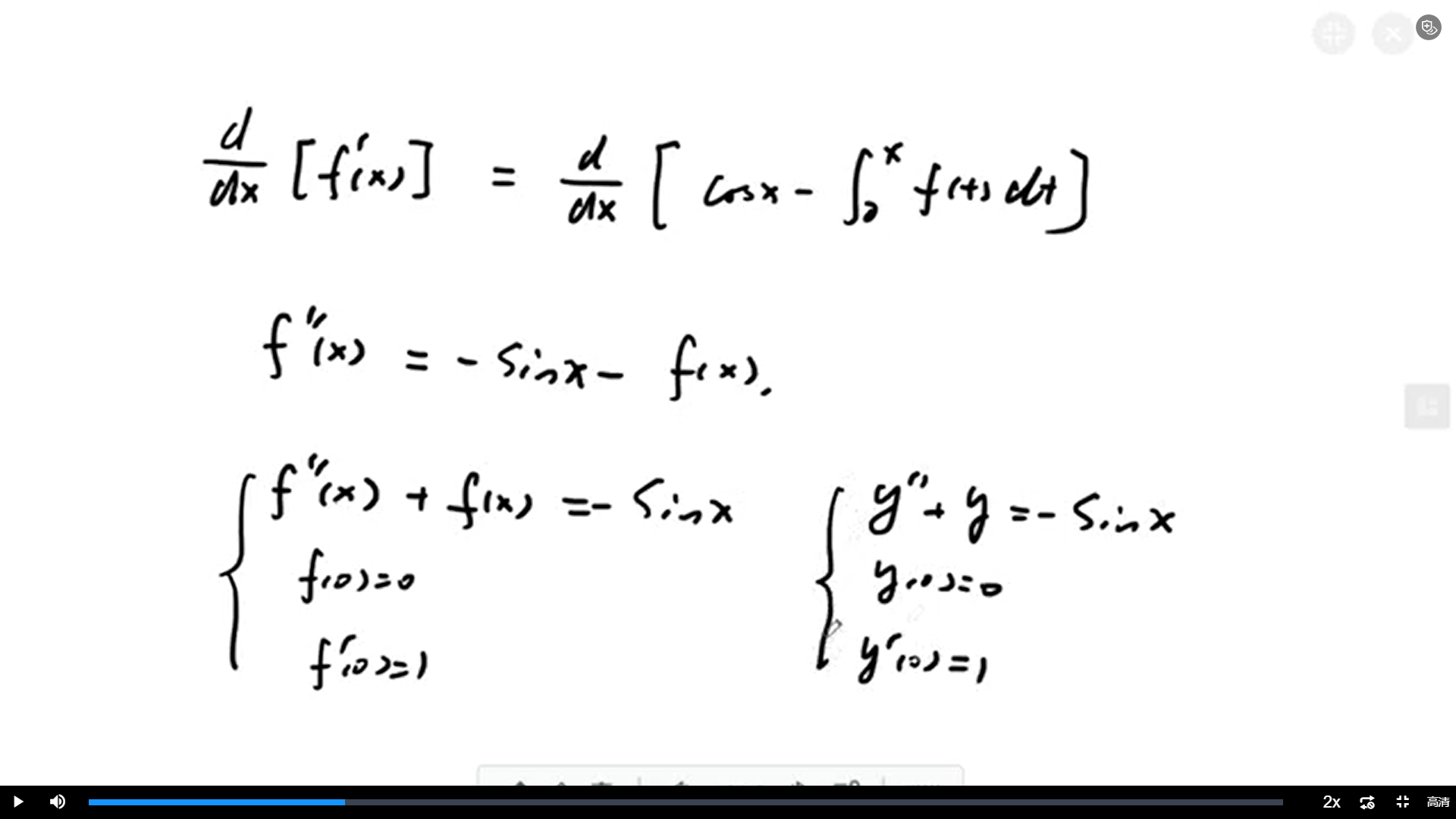
边上先积分求导
常数换元、拆分
1
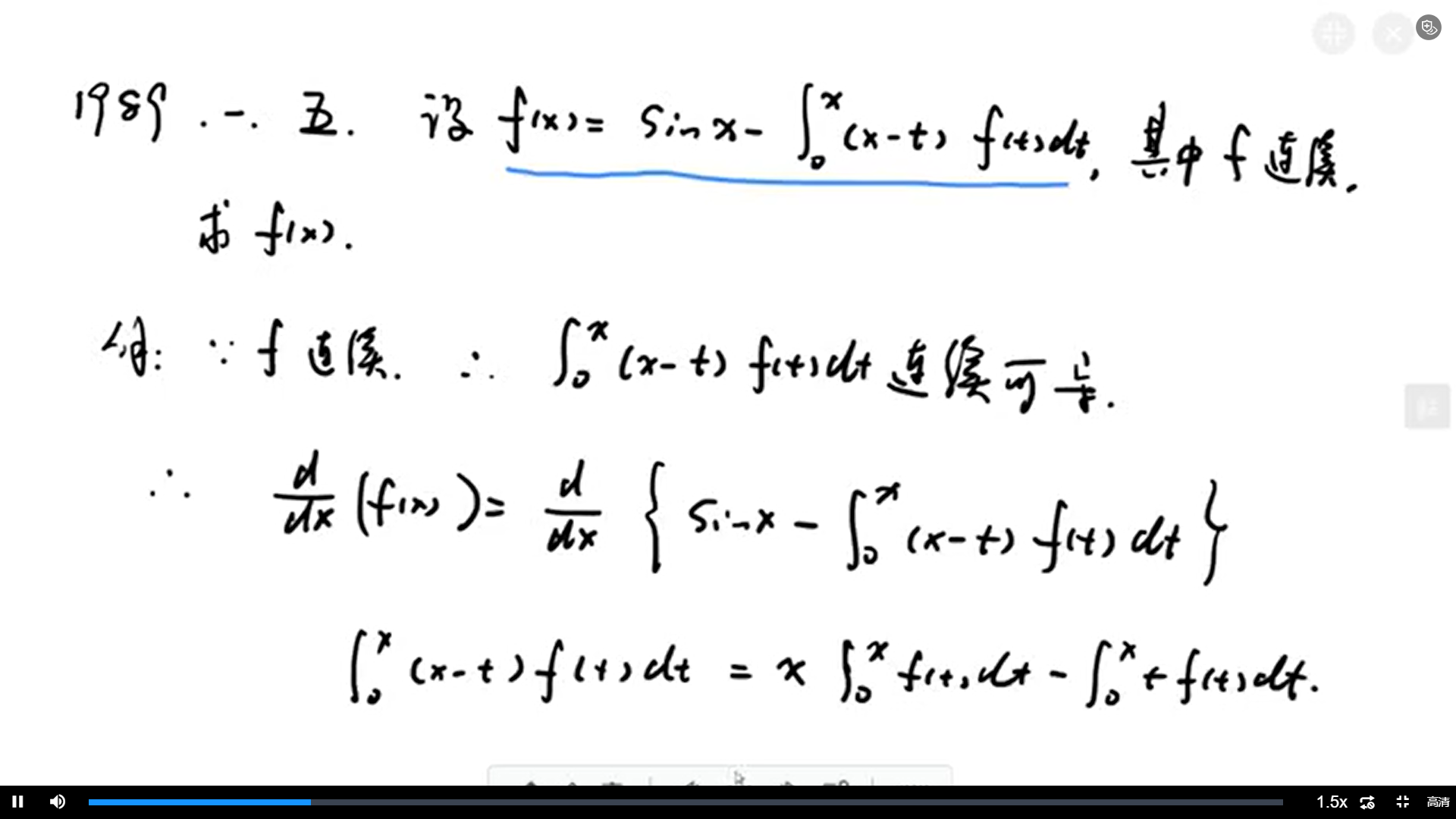

求导后还有变上限积分、再次求导
化成二阶可降解得微分方程
一直直线相切得条件————1.函数值2、斜率
2
这篇关于微分方程_by小崔说数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







