本文主要是介绍IEEE RAL 具有高运动性能的仿旗鱼机器人协同运动机制研究,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
水下机器人作为军用侦察、监测及攻击装置备受关注,目前传统水下机器人普遍采用螺旋桨作为推进器,但高噪音、高能耗等问题限制了应用范围。鱼类通过自然选择进化出优异的运动性能,特别是在海洋中游动速度快、机动性强的旗鱼。为了探究快速和高机动性的水下运动方式,南京航空航天大学俞志伟副研究员以旗鱼为仿生对象,设计出了可通过背鳍与尾鳍进行协同运动的仿旗鱼机器人并且仿旗鱼机器人具备了优秀的运动性能。该仿旗鱼机器人运动的最大平均速度为1.24 m/s。相关成果以“Cooperative Motion Mechanism of a Bionic Sailfish Robot With High Motion Performance”为题发表在国际期刊《IEEE Robotics and Automation Letters》(论文在线网址:https://ieeexplore.ieee.org/document/10543165)。南航俞志伟副研究员为该论文的第一作者,吉爱红研究员为该论文的通讯作者。相关工作得到了国家自然科学基金(52075248)、南京航空航天大学航天结构力学与控制国家重点实验室科研基金(1005-ZAG23011)的资助。
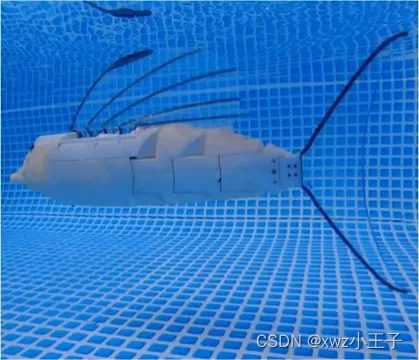
图1.仿旗鱼机器人实物
研究背景:
目前机器鱼的游动速度多在1m/s 以下,这表明在游动性能方面,机器鱼与生物鱼相比仍有着较大的差距,这是目前急需解决的问题。旗鱼的运动性能在海洋生物中较为突出,这与其流线型外形、新月形尾鳍、背鳍等生物特性有关。因此,该文以旗鱼为仿生对象,在仿生外形结构、新型仿生运动节律、背鳍与尾鳍协同运动机制等方面开展了较为深入的研究,设计出可通过背鳍与尾鳍协同运动的仿生旗鱼机器人。
文章概述:
首先是机器人样机设计,如图2所示。仿旗鱼机器人是以拥有优异运动性能的旗鱼为仿生对象,遵循仿生性、模块化、紧凑化的设计原则。机器鱼由主体部分、背部以及尾部组成。
图2. (a)旗鱼的外形和结构; (b)仿生旗鱼机器人的外形和结构; ©折叠/展开状态下的背鳍; (d)背鳍和尾鳍运动示意图

接着对新型仿生运动节律进行研究,针对旗鱼的运动特征,对新型尾部运动节律进行设计。通过仿真分析尾部在新运动节律下的推进性能,然后搭建实验平台进行实验分析,最后分析新型运动节律推进性能优势。该新型尾部运动节律与正弦运动节律相比,推力峰值提升近170%、前进方向冲量增加超30%,使机器鱼具有加速性能好、速度提升快的优势。
图3.旗鱼尾巴的半周期轨迹
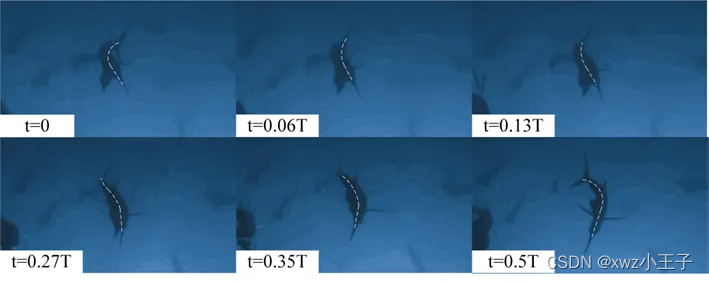
图4.仿生旗鱼机器人尾部的运动规划 (a)尾部的运动规划轨迹; (b)三个关节的运动曲线。
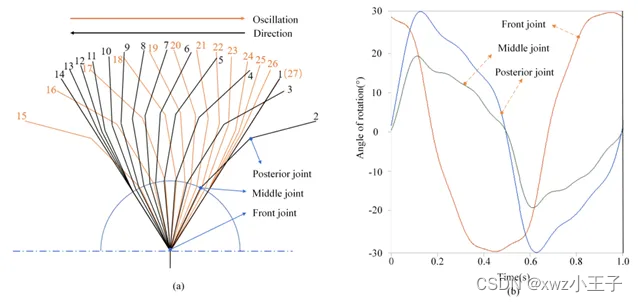
图5.实验平台

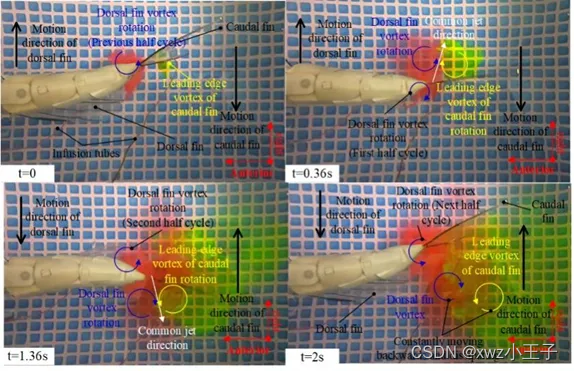
然后讨论了相位差对背尾鳍向前推进性能的影响。通过测力实验(图5)以及流体染色实验,可以从推力和涡的角度来分析背鳍与尾鳍协同运动机制。同时,对背尾鳍协同运动理论进行了深入分析。
图6.背鳍和尾鳍以180°相位差协同运动流体染色
这篇关于IEEE RAL 具有高运动性能的仿旗鱼机器人协同运动机制研究的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





