ral专题
IEEE RAL 具有高运动性能的仿旗鱼机器人协同运动机制研究
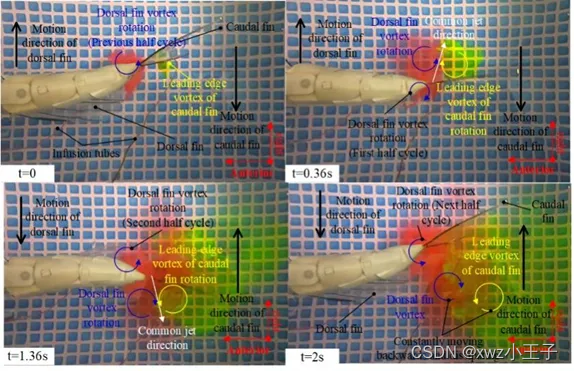
水下机器人作为军用侦察、监测及攻击装置备受关注,目前传统水下机器人普遍采用螺旋桨作为推进器,但高噪音、高能耗等问题限制了应用范围。鱼类通过自然选择进化出优异的运动性能,特别是在海洋中游动速度快、机动性强的旗鱼。为了探究快速和高机动性的水下运动方式,南京航空航天大学俞志伟副研究员以旗鱼为仿生对象,设计出了可通过背鳍与尾鳍进行协同运动的仿旗鱼机器人并且仿旗鱼机器人具备了优秀的运动性能。该仿旗鱼机器人运
RobotGPT:利用ChatGPT的机器人操作学习框架,三星电子研究院与张建伟院士、孙富春教授、方斌教授合作发表RAL论文
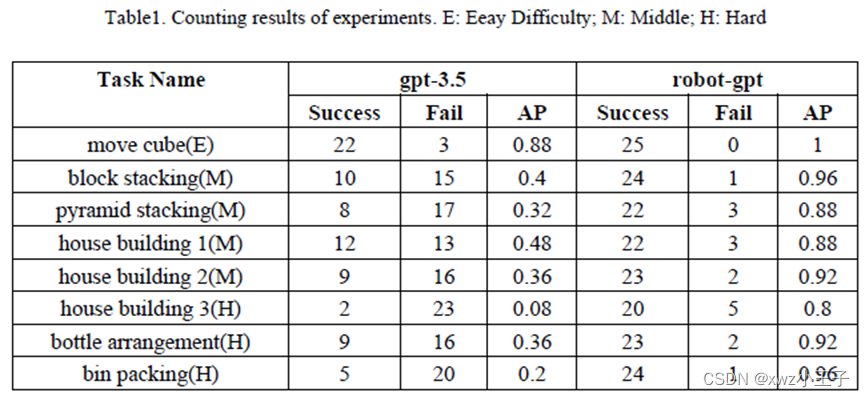
1 引言 大型语言模型(LLMs)在文本生成、翻译和代码合成方面展示了令人印象深刻的能力。最近的工作集中在将LLMs,特别是ChatGPT,整合到机器人技术中,用于任务如零次系统规划。尽管取得了进展,LLMs在机器人技术中的潜力的完整范围仍然未被探索。人机交互(HRI)的不断发展从LLM的进步中受益,特别是在自然语言交互方面。ChatGPT以其代码生成和对话灵活性脱颖而出,允许用户直观地与机器人互
机器人领域顶刊TRO,TASE及RAL的区别与关系
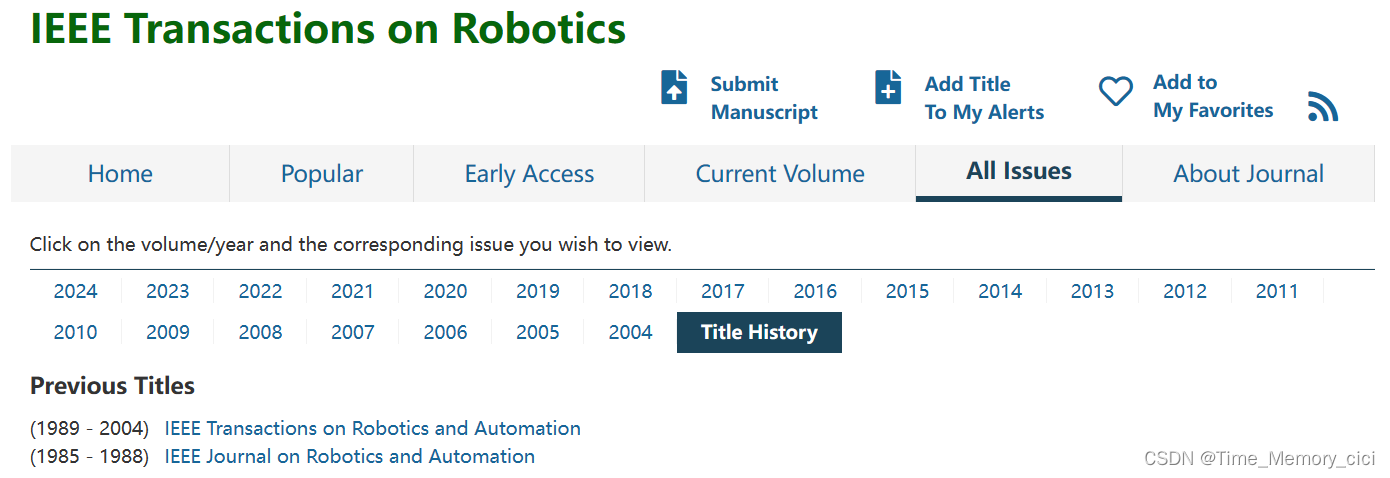
一、背景 机器人领域越来越火,特别是在具身智能的加持下,让机器人在不久的未来可以完成更多复杂的任务,进入到我们的日常生活(不过应该还需要很长很长时间)。作为机器人方向的Researcher,我们会看许多机器人相关的论文,如TRO,TASE,RAL等,这里简要介绍下他们的区别与联系。 二、TRO TRO全称:IEEE Transactions on Robotics,当前机器人领域的TOP1期
vslam论文24:ESVIO: 基于事件相机的双目VIO(RAL 2023)
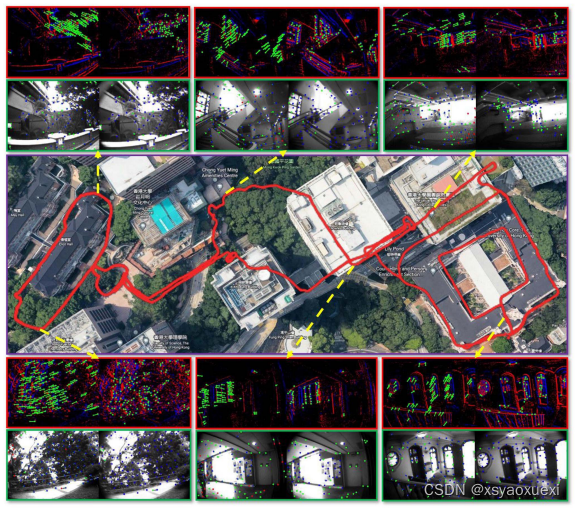
摘要 异步输出低延迟事件流的事件相机为具有挑战性的情况下的状态估计提供了很大的机会。尽管近年来基于事件的视觉里程测量技术得到了广泛的研究,但大多数都是基于单目的,而对立体事件视觉的研究很少。在本文中,我们介绍了ESVIO,这是第一个基于事件的立体视觉惯性里程计,它利用了事件流、标准图像和惯性测量的互补优势。我们建议的pipeline包括ESIO(纯基于事件的)和ESVIO(带有图像

RAL期刊投稿信息【来自官网】
官网信息来源:RA-L Information for Authors 期刊范围 RA-L 的范围是发表同行评审文章,及时、简明地介绍创新研究理念和应用成果,报道机器人和自动化领域的重要理论发现和应用案例研究。 RA-L 关键词 具体涉及此处列出的主题领域和关键词。所有关键词均应解释为要求与机器人和/或自动化相关。例如,"深度学习方法 "代表 “机器人和自动化中的深度学习方法”。 下面的