具有专题

sql 中名字 不可以 包含 mysql中 具有 特定意义 的单词
这种sql执行不报错 这种sql执行报错 所以sql中名字不可以使用mysql中具有特定意义的单词 以此文章作为警告,我下次起名字不可以使用 mysql中具有特殊意义的字符 就因为这个导致我搞了一个多小时,急死我了,周五就要前后端联调了。下次千万不能随便起名字了

论文速读|ROS-LLM:具有任务反馈和结构化推理的具身智能ROS 框架
论文地址:https://arxiv.org/pdf/2406.19741 ROS-LLM 框架旨在通过集成大型语言模型(LLM)和机器人操作系统(ROS),实现对机器人的直观编程。该框架支持通过聊天界面接收自然语言提示,并能够根据 ROS 环境中的传感器读数自动提取和执行行为。框架支持三种行为模式:序列、行为树和状态机。此外,通过模仿学习,用户可以向系统添加新的机器人动作。该研究通过实验

HT97230 具有3D环绕和低音增强功能的125mW免输出耦合电容的立体声线路驱动器1耳机放大器
特点 可调节的3D环绕功能 可调节的低音增强功能 输出无需隔直流电容 卓越的低音效果! 无咔嗒/噼噗声 低THD+N:最低0.001% 低噪声,VN:7μV 支持单端输入和全差分输入 2.5V至5.2V较宽的电源工作范围 输出功率: 125mW(fIN =1kHz,VDD=5V,RL=32Ω THD+N=0.1%) 输出摆幅: 3Vrms (fIN = 1kHz, VDD=5V, RL=1kΩ,

知名专家郑茂林:SCDO主网与子网的交互自然系统在未来具有无限潜力
2020年8月26日,SCDO全球区块链技术大会于深圳隆重启幕。SCDO资深顾问,互联网金融及大数据行业内领军人物郑茂林博士在会上做了重要演讲。 郑茂林强调:SCDO的分片技术可以实现交易速度的成倍增长 在会上,郑茂林对SCDO的算法与数据模型进行了具体解说,强调SCDO的分片技术可以实现交易速度的成倍增长,共识算法ZPoW的CPU绝对友好,主链协议可以使SCDO主网延伸到各个应用领域。郑博士

求解组合优化问题的具有递归特征的无监督图神经网络
文章目录 ABSTRACT1 Introduction2 Related Work3 QRF-GNN方法4 数值实验4.1 MAX-CUT ABSTRACT 介绍了一种名为QRF-GNN的新型算法,有效解决具有二次无约束二进制优化(QUBO)表述的组合问题。依赖无监督学习,从最小化的QUBO放松导出的损失函数。该架构的关键组成部分是中间GNN预测的递归使用、并行卷积层以
图片拼图怎么做?4个方法打造具有高级感的拼图作品
被阿勒泰的日落治愈了,旅行中的每一刻都值得珍藏。 这次的阿勒泰之行,我不仅带回了一堆美好的回忆,还有手机里满满的精彩瞬间。从壮丽的山川到静谧的湖泊,从晨曦初现到夜幕降临,每一帧都是大自然的馈赠。但是,如何把这些珍贵的照片拼接在一起,拼出那种杂志封面般的高级感呢? 别担心,今天就来和大家分享图片拼图怎么拼高级感,保证让你的作品既美观又大气! 方法一:拼图工具箱 ✔ 它的优势在哪里呢?

python将具有负数的字符串转换为float列表
要转换的字符串打印出来之后如下: [-4.566020,-2.973191,3.168476,-1.488778,1.580645,-3.810200,-2.111511,-9.118567,-2.217612,2.006080] 这是一个字符串,要把他转换为列表,操作如下 lib_feature = result[1].strip('[').strip(']')#首先去掉两头的

MAX811LEUS+T 具有低电源电流 带有手动复位输入 微处理器电压监测器
MAX811LEUS+T低功耗微处理器(µP)监控电路用于监控µP和数字系统中的电源。当与5V供电或3V供电电路一起使用时,它们无需外部元件,也不用进行调整,可实现非常可靠的低成本电路。MAX811LEUS+T还提供去抖手动复位输入。 MAX811LEUS+T执行单一功能:每当VCC电源电压下降到预设阈值以下,它们都会将复位信号置位,并在VCC上升到复位阈值以上后将该信号保持置位状态至少140ms

LN2054Y42AMR 具有热调节功能的独立直线锂离子电池充电器
一般说明 LN2054是一款为单节锂离子电池设计的完整恒流/恒压线性充电器。其ThinSOT封装和外部元件数量少,使LN2054最适合便携式应用。此外,LN2054专门设计用于在 USB 电源规格内工作。 由于内部 MOSFET架构,不需要外部感测电阻,也不需要阻塞二极管。热反馈调节电荷电流,以限制高功率运行或高环境温度下的管芯温度。电荷电压固定在4.2V,电荷电流
windows 无法安装到这个磁盘,选中的磁盘具有MBR分区表。在EFI系统上,windows只能安装在GPT磁盘上
问题: 今天下午路过李芬在装固态硬盘,遇到了一个棘手的问题。在选择安装分区的时候,提示有这样的错误。 Windows 无法安装到这个磁盘。选中的磁盘具有MBR分区表。在 EFI 系统上,Windows 只能安装到 GPT 磁盘。 解决方案一: 之前遇到这样过这样的错误。立马就想到了解决方案,但解决方法虽然能解决安装问题。但有些缺陷,就是必须把硬盘中所有的分区都
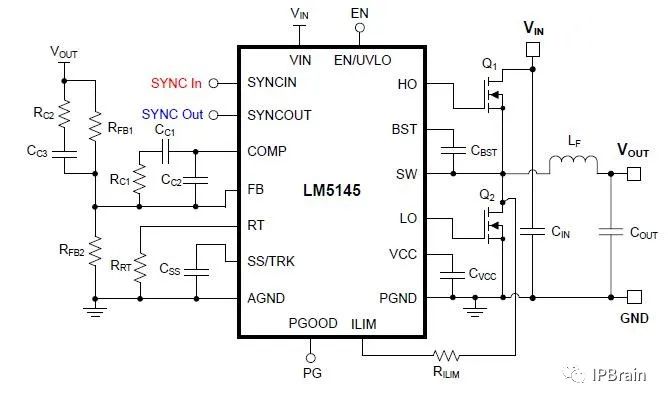
具有宽输入电压范围的75V同步降压控制器LM5145
芯品快报:亚德诺(ADI)汽车音频总线A²B收发器AD2428 这周末,除非外面下钞票,否则谁也拦不住我玩《黑神话悟空》(附:两款可以玩转悟空的显卡推荐) LM5145是德州仪器推出的一款具有较宽输入电压的75V同步降压控制器,其输入电压范围可达6V~75V,具有0.8V~60V可调整的输出电压,可应用于RRU和PoE、工业控制等方面。 LM5145同步降压控制器旨在对会发生高压瞬变的高输入

具有动态种子的 DGA 系列:DNS 流量中的意外行为
介绍 在这篇博文中,我们将简要概述 DGA,然后分享一些有趣的发现。 Akamai 安全情报小组能够分析来自CacheServe DNS 服务器的 DNS 查询的匿名日志。作为我们僵尸网络检测工作的一部分,我们观察和监控了 100 多个已知 DGA 家族的实际行为。 我们发现,动态种子 DGA(DGA 的一个子集)的行为通常与逆向工程 DGA 算法本身所暗示的行为截然不同。更准确地说,我们看

具有手势识别的动捕设备——mHand Pro VR数据手套
数据手套是指通过手套内置的传感器,实时采集手部运动数据的动捕设备,通常被应用于虚拟仿真、虚拟现实vr交互、动画制作等领域。其中,基于惯性动作捕捉技术研发的数据手套,凭借其高性价比的优势,在市面上的应用更为广泛。 如mHand Pro数据手套,其基本原理是通过手部的传感器、震动器和反馈装置,实时捕捉真人的手部动作、力度和触感反馈,从而让真人可以在虚拟空间中进行真实感十足的手部互动,为用户提供了一种

ECCV2024|港中文提出文本生成3D方法DreamDissector,能够生成具有交互的多个独立对象。
DreamDissector 是一种文本生成3D对象的方法,通过将多对象文本生成的NeRF输入并生成独立的纹理网格,提供了对象级别的控制和多种应用可能性。 DreamDissector 可以生成具有合理交互的多个独立纹理网格,方便各种应用,包括对象级别的文本引导纹理、通过简单操作方便的手动用户几何编辑以及文本引导的可控对象替换。 相关链接 论文地址:https://a
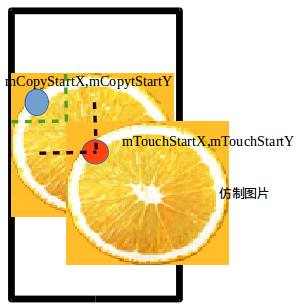
android图片涂鸦,具有设置画笔,撤销,缩放移动等功能(二)
该项目的代码已经重构,采用了新框架,强烈建议查看《Android全新图片涂鸦框架Doodle——多功能、可自定义、可扩展》 (旧代码暂时不维护了,所以推荐还是使用最新框架吧!也希望大伙支持!!!) 点击移步到最新涂鸦框架>>>Doodle 点击移步到最新涂鸦框架>>>Doodle 点击移步到最新涂鸦框架>>>Doodle ———————————————————

android图片涂鸦,具有设置画笔,撤销,缩放移动等功能(一)
该项目的代码已经重构,采用了新框架,强烈建议查看《Android全新图片涂鸦框架Doodle——多功能、可自定义、可扩展》 (旧代码暂时不维护了,所以推荐还是使用最新框架吧!也希望大伙支持!!!) 点击移步到最新涂鸦框架>>>Doodle 点击移步到最新涂鸦框架>>>Doodle 点击移步到最新涂鸦框架>>>Doodle ——————————————————————————

通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,生成表示一个具有非标准形状的圆柱体(在本例中是杯子)
MATLAB的机器人系统工具箱(RST)的官方例程Plan a Reaching Trajectory with Multiple Kinematic Constraints规划具有多个运动学约束的到达轨迹 % 创建用于视觉化杯子的点[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);% 调整 Z 坐标的比例,使其符合杯子的高度Z

回归分析系列12—具有交互项的回归模型
14 具有交互项的回归模型 14.1 简介 在回归模型中,除了考虑单个预测变量对响应变量的影响外,还可以考虑预测变量之间的交互作用。这些交互作用项能够捕捉到一个预测变量对另一个预测变量影响的调节作用,从而提供对数据更深刻的理解。 14.2 交互项的定义 假设我们有两个预测变量 X1和 X2,如果我们怀疑它们之间存在交互作用,那么可以在回归模型中加入一个交互项 X1*X2。这个交互项表示
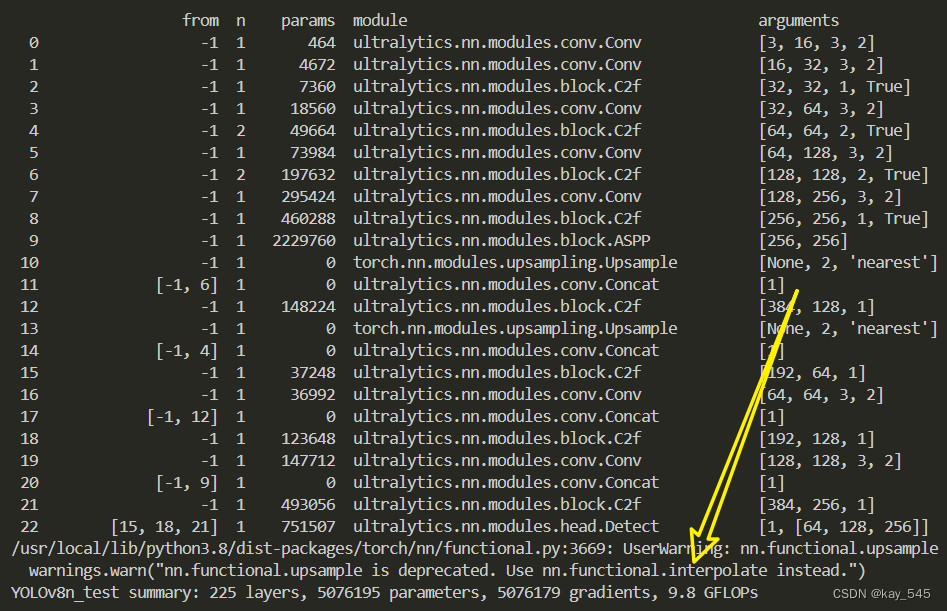
YOLOv8改进 | SPPF | 具有多尺度带孔卷积层的ASPP【CVPR2018】
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 专栏目录 :《YOLOv8改进有效涨点》专栏介绍 & 专栏目录 | 目前已有40+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进——点击即可跳转 Atrous Spatial Pyramid Pooling (ASPP) 是一种在深度学习框架中用于语义分割的网络结构,它旨
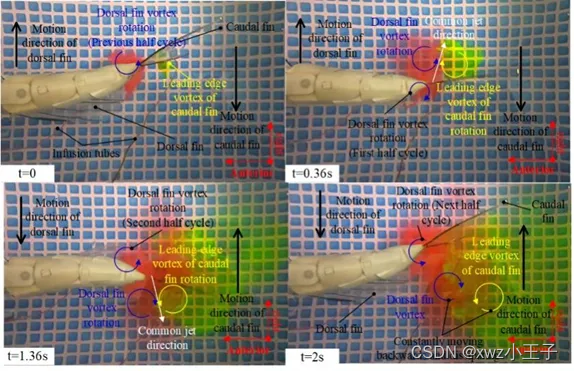
IEEE RAL 具有高运动性能的仿旗鱼机器人协同运动机制研究
水下机器人作为军用侦察、监测及攻击装置备受关注,目前传统水下机器人普遍采用螺旋桨作为推进器,但高噪音、高能耗等问题限制了应用范围。鱼类通过自然选择进化出优异的运动性能,特别是在海洋中游动速度快、机动性强的旗鱼。为了探究快速和高机动性的水下运动方式,南京航空航天大学俞志伟副研究员以旗鱼为仿生对象,设计出了可通过背鳍与尾鳍进行协同运动的仿旗鱼机器人并且仿旗鱼机器人具备了优秀的运动性能。该仿旗鱼机器人运

Depth Anything V2:抖音开源高性能任何单目图像深度估计V2版本,并开放具有精确注释和多样化场景的多功能评估基准
📜文献卡 题目: Depth Anything V2作者: Lihe Yang; Bingyi Kang; Zilong Huang; Zhen Zhao; Xiaogang Xu; Jiashi Feng; Hengshuang ZhaoDOI: 10.48550/arXiv.2406.09414摘要: This work presents Depth Anything V2. With

【Rust日报】2021-11-30 —— 具有内置Rust支持的下一代JetBrains IDE
JetBrains Fleet: 具有内置Rust支持的下一代JetBrains IDE JetBrains Fleet: Next generation JetBrains IDE with built-in Rust support Fleet是JetBrains创建的一个功能齐全的轻量级编辑器,同时也是一个功能齐全的IDE:具有智能补全、重构、导航、调试以及 IDE 中一直存在的所有功能
如何让表格标题栏具有粘性?
让表格标题栏具有粘性 什么意思呢? 就是当表格的内容(行数)比较多的时候, 滚动屏幕,看下面的内容的时候, 表格标题栏可以一直显示在屏幕最上方, 以前呢, 我会通过JS+CSS 的 position: fixed; 属性来实现这样的功能, 当然,这样的实现其实是比较通用的; 今天要说的是一个新的方法,不需要JS,只需要CSS就可以搞定 这两个CSS属性就是: posit
PullBezierZoomView 一个具有贝塞尔曲线下拉效果的自定义view
该控件效果基于PullZoomView源码改动的而来,感谢Frank-Zhu的开源代码.该控件具有下拉放大背景图和贝塞尔曲线的效果. github:https://github.com/X-FAN/PullBezierZoomView 欢迎star 我主要写了一个自定义的贝塞尔曲线的效果的控件并整合到了Frank-Zhu的项目中的一个子项中. 这里面有个小数学知识的求解,因为效果要贝赛尔曲线
实现具有多个实现类的接口并为每个实现类定义一个名字的方法
在Java中,实现具有多个实现类的接口并为每个实现类定义一个名字的方法,可以通过使用工厂模式或服务定位器模式来完成。以下是使用工厂模式的一个示例: 定义接口和实现类 首先,定义一个接口和多个实现类: // 接口public interface ServiceInterface {void serve();}// 实现类1public class ServiceImpl1 implement

使用接口导入物料时,提示完全控制批次的物料必须具有前后缀
使用接口导入物料时,提示完全控制批次的物料必须具有前后缀 今天开发顾问在导入物料时,出现错误:完全控制批次的物料必须具有前后缀。但是在某些组织才会出现。 TRANSACTION ID : 460938 ORGANIZATION ID : 151 TABLE NAME : MTL_SYSTEM_ITEMS_INTERFACE COLUMN NAME : LOT_CONTROL_CODE ME