aloha专题
![[论文阅读] mobile aloha实验部分](https://i-blog.csdnimg.cn/direct/ebec028d5656407289b84880992d4b98.png)
[论文阅读] mobile aloha实验部分
DP:[1] CHI C, FENG S, DU Y, et al. Diffusion Policy: Visuomotor Policy Learning via Action Diffusion[J]. 2023. Diffusion Policy: Visuomotor Policy Learning via Action Diffusion精读笔记(一)-CSDN博客 VINN:[1
HumanPlus——斯坦福ALOHA团队开源的人形机器人:融合影子学习技术、RL、模仿学习
前言 今天只是一个平常的日子,不过看到了两篇文章 一篇是《半年冒出近百家新公司,「具身智能」也有春天》 我看完之后转发到朋友圈,并评论道:让机器人翻一万个后空翻,不如让机器人打好一个螺钉,毕竟在目前阶段 炫酷没有意义,所以我们近期全力为工厂去赋能,解决一个个工业场景 期待我司与更多工厂合作,从前期的验证、评估开始另外一篇文章便是之前斯坦福Moblie aloha团队竟然开源推出了他们的人形机器

Aloha机械臂的mujoco仿真问题记录
今天在测试ACT代码时,遇到了仿真中的机械臂无法摆放正确的姿势来抓去红色方块。 后来经过测试,发现应该是python包的版本问题有误,下面记录下正确的包版本: 官方给出的包: conda create -n aloha python=3.8.10conda activate alohapip install torchvisionpip install torchpip ins

【时隙ALOHA,CSMA(载波侦听多路访问)carrier sense mltiple access,无线局域网: CSMA/CA】
文章目录 时隙ALOHA时隙ALOHA的效率( Efficiency )纯ALOHA(非时隙)----效率低CSMA(载波侦听多路访问)carrier sense mltiple accessCSMA冲突CSMA/CD(冲突检测)边说边听(提高了信道利用率)以太网就是用的这个无线局域网: CSMA/CA无线局域网中的 MAC:CSMA/CA无线局域网: CSMA/CA冲突避免(续)
大模型机器人发展史:从VoxPoser、RT2到斯坦福Mobile ALOHA、Google机器人
前言 23年7月,我在朋友圈评估Google的RT2说道: “大模型正在革新一切领域啊,超帅,通过大模型不仅能理解“人话”,还能对“人话”进行推理,并转变为机器人能理解的指令,从而分阶段完成任务。回头仔细看下论文”当时便对大模型机器人印象深刻,一直想仔细研究下来着,但因为后来一直和团队忙于论文审稿GPT、企业知识库问答等项目,所以一直没抽出时间去深入研究 没成想,前几天,斯坦福的炒菜机器人火

斯坦福大学全能家政服务机器人Mobile ALOHA以及“小群体大智慧”Zooids集群机器人
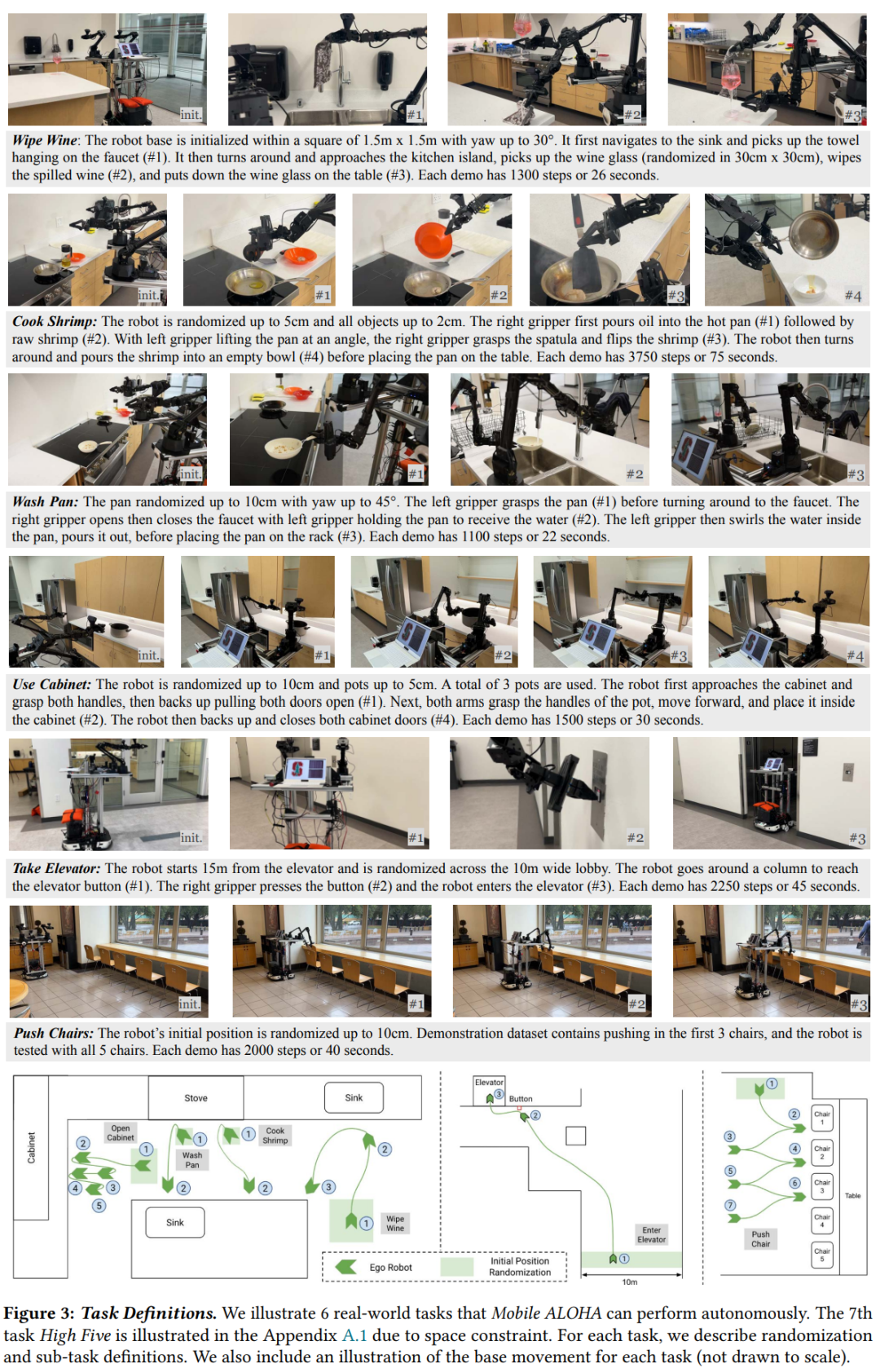
斯坦福大学成功研发出低成本自主进化克隆人类行为和任务的能力全能型家政服务机器人。 原文标题: 【Mobile ALOHA-Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation】 论文链接:【Mobile ALOHA (mobile-aloha.github.io)】。 以及由斯坦福大学和法
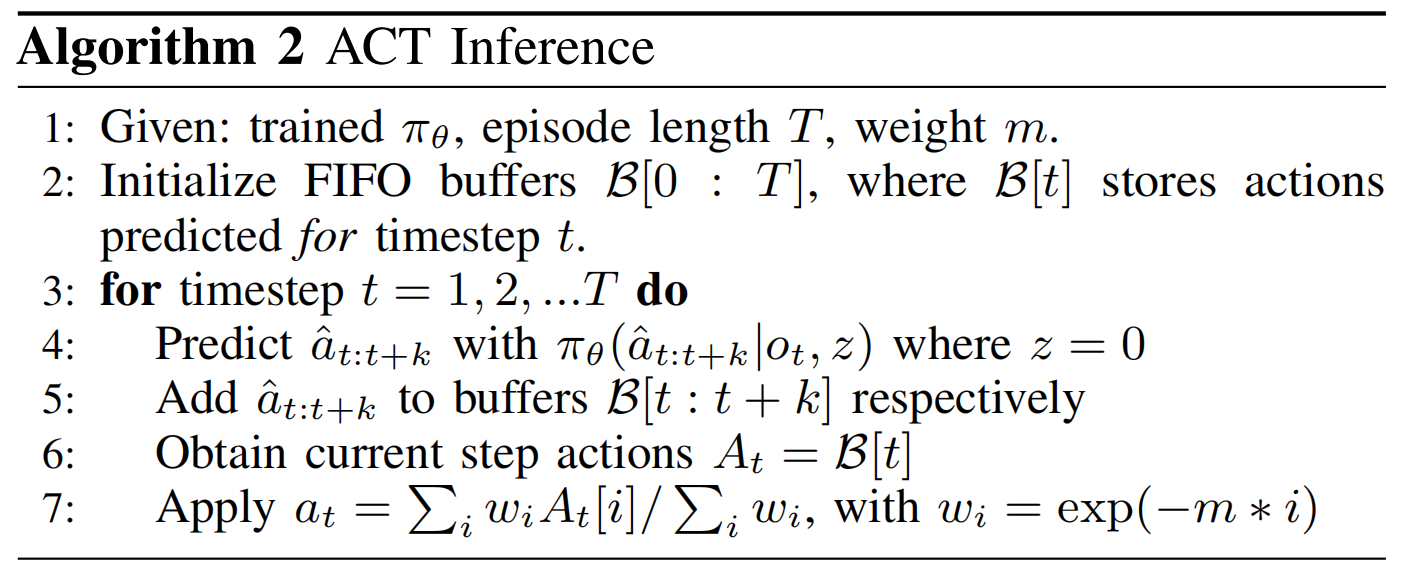
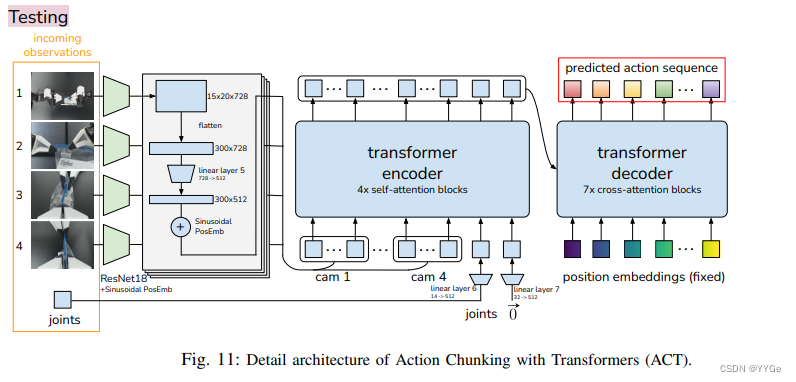
斯坦福Mobile ALOHA背后的关键技术:动作分块算法ACT的原理解析
前言 23年已过35 今24年则将36,到40岁之前还有4年半,这4年半我想冲一把大模型机器人(兼具商业价值、社会价值、科技价值 ),因为 通过过去一年的研究探索与应用开发(比如我带队开发完成的AIGC模特生成、论文审稿GPT、企业知识库问答等),机器人是在可能范围之内我能做的最大的项目(至于更大的如造车 我也干不了),很难,4年半下来也不一定能达到预期,但全力希望通过Q1之内的技术准备、复现
Mobile ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation
文章目录 1. Mobile ALOHA 11.1 项目地址 2. Mobile ALOHA 22.1 相关链接2.2 What's upgraded in II ? Reference Stanford 最新家务机器人 1. Mobile ALOHA 1 Mobile ALOHA: Learning Bimanual Mobile Manipulation with

谷歌 DeepMind 联合斯坦福推出了主从式遥操作双臂机器人系统增强版ALOHA 2
谷歌 DeepMind 联合斯坦福推出了 ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的性能、人体工程学设计和稳健性,且成本还不到 20 万元人民币。并且,为了加速大规模双手操作的研究,ALOHA 2 相关的所有硬件设计全部开源了,并提供了详细的教程,以及具有系统识别功能的 ALOHA 2 MuJoCo 模型。谷歌 DeepMind 放出了相关论文《ALOHA
【EAI 007】Mobile ALOHA:一个低成本的收集人类示教数据的双臂移动操作硬件系统
论文标题:Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation 论文作者:Zipeng Fu, Tony Z. Zhao, Chelsea Finn 作者单位:Stanford University, UC Berkeley, Meta 论文原文:https://arx

Aloha原理以及代码分析参考资料链接汇总
平台:CSDN Mobile Aloha 【软硬件原理+代码解析】 作者:Yuezero_ Aloha 机械臂的学习记录3——AWE:Pycharm运行代码记录 作者:随机惯性粒子群 【EAI 007】Mobile ALOHA:一个低成本的收集人类示教数据的双臂移动操作硬件系统 作者:datamonday 斯坦福Mobile ALOHA背后的关键技术:动作分块算法ACT的原理解析 作者:v

【论文】:ALOHA双手远程操作手臂
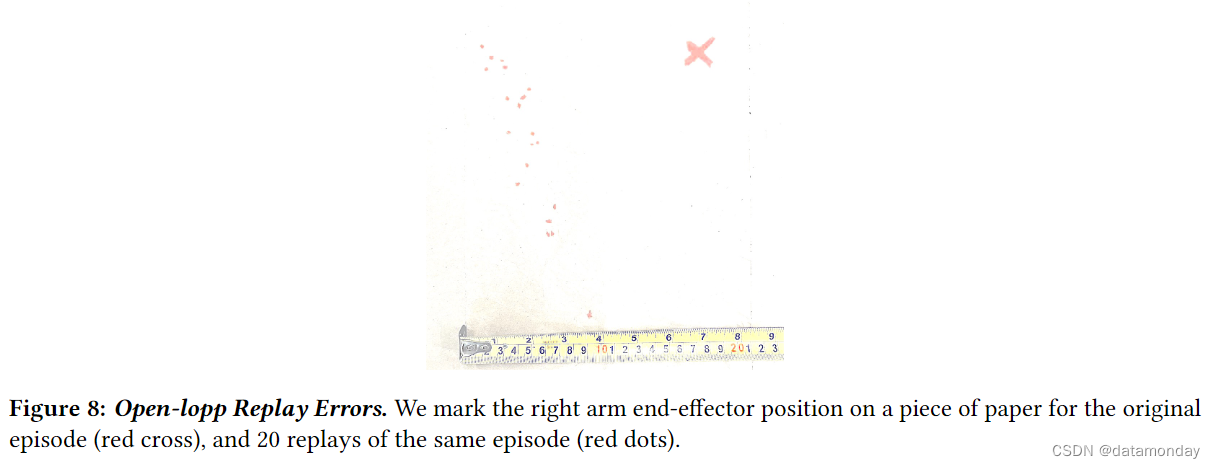
对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务? 我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特
ALOHA论文翻译:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware 学习用低成本硬件进行精细双手操作 这是ALOHA 翻译,别搞混了。 Mobile ALOHA 论文翻译,请移步:Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperatio

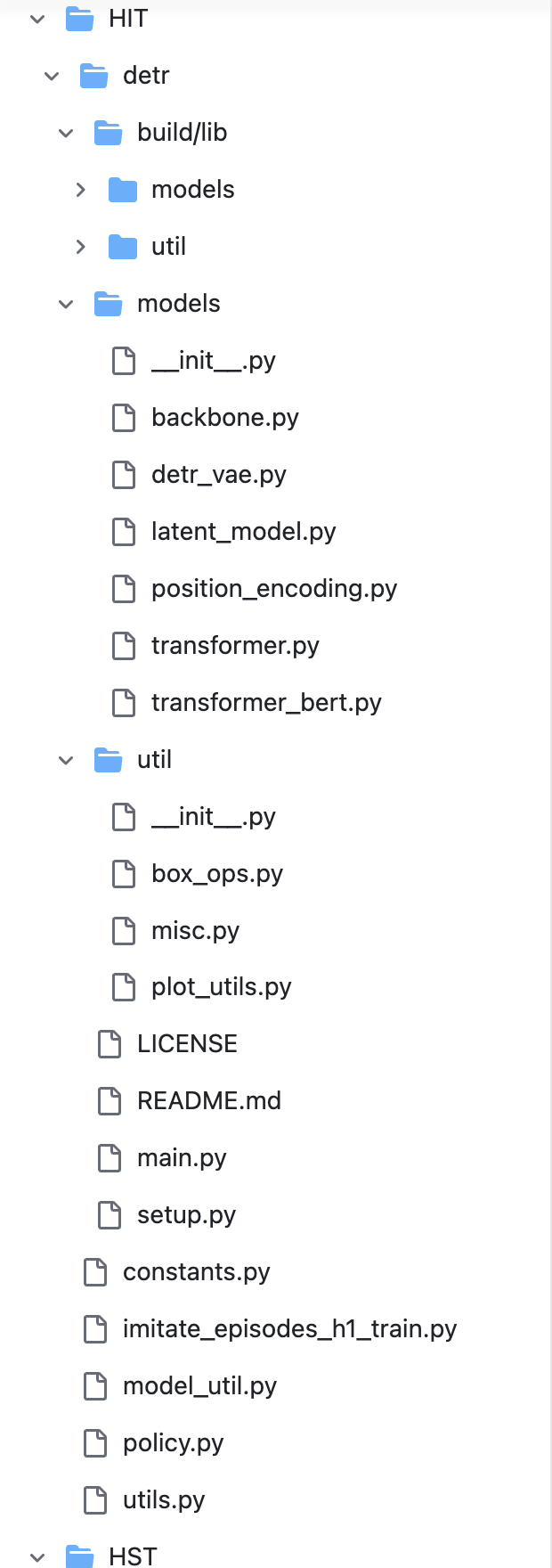
Aloha 机械臂的学习记录4——act:detr_vae.py的代码部分
detr_vae.py的原始代码如下: # Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved"""DETR model and criterion classes."""import torchfrom torch import nnfrom torch.autograd import Varia
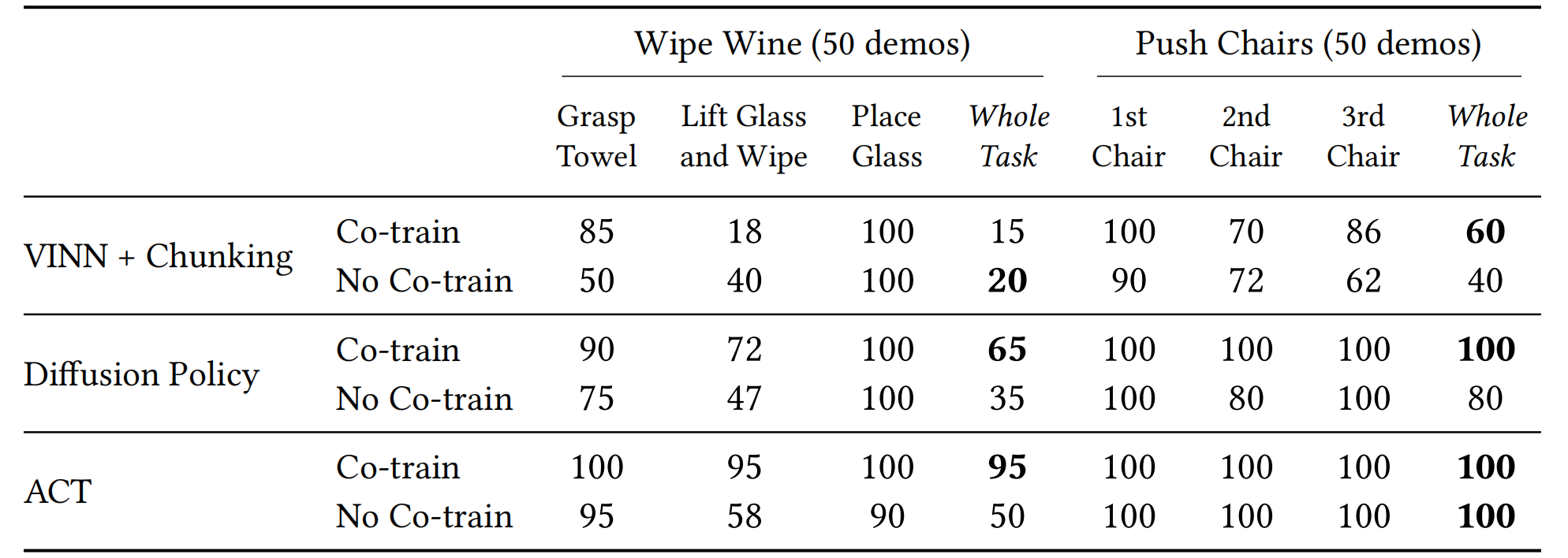
斯坦福Mobile ALOHA提到的ACT之外的另两项技术:Diffusion Policy、VINN
前言 本文接上一篇文章《斯坦福机器人Mobile ALOHA的关键技术:动作分块ACT的算法原理与代码剖析》而来,当然最开始本文是作为上一篇文章的第二、第三部分的 但因为ACT太过关键,除了在上一篇文章中写清楚其算法原理之外,还得再剖析其代码实现,故为避免上一篇文章太过长,也为更清楚的阐述Diffusion Policy、VINN,故便有了本文 第一部分 Diffusion Policy
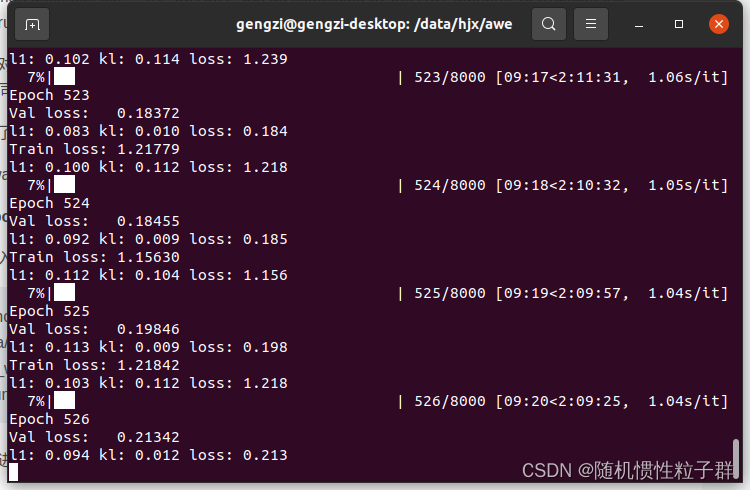
Aloha 机械臂的学习记录3——AWE:Pycharm运行代码记录
之前的博客创作了三偏关于Aloha_AWE的liunx终端指令运行代码的示例: Aloha 机械臂的学习记录——AWE:Bimanual Simulation Suite: https://blog.csdn.net/qq_54900679/article/details/134889183?spm=1001.2014.3001.5502 Aloha 机械臂的学习记录1——AWE:Biman
大模型机器人发展史:从VoxPoser、RT2到斯坦福Mobile ALOHA、Google机器人
前言 23年7月,我在朋友圈评估Google的RT2说道: “大模型正在革新一切领域啊,超帅,通过大模型不仅能理解“人话”,还能对“人话”进行推理,并转变为机器人能理解的指令,从而分阶段完成任务。回头仔细看下论文”当时便对大模型机器人印象深刻,一直想仔细研究下来着,但因为后来一直和团队忙于论文审稿GPT、企业知识库问答等项目,所以一直没抽出时间去深入研究 没成想,前几天,斯坦福的炒菜机器人火
大模型机器人原理解析:如何从RT/RT2、Berkeley Gello到发展到斯坦福Mobile ALOHA、Google家务机器人
前言 23年7月,我在朋友圈评估Google的RT2说道: “大模型正在革新一切领域啊,超帅,通过大模型不仅能理解“人话”,还能对“人话”进行推理,并转变为机器人能理解的指令,从而分阶段完成任务。回头仔细看下论文”,当时便对大模型机器人印象深刻,一直想仔细研究下来着但因为后来一直和团队忙于论文审稿GPT、企业知识库问答等项目,所以一直没抽出时间去深入研究 没成想,前几天,斯坦福的炒菜机器人火
Aloha 机械臂的学习记录2——AWE:AWE + ACT
继续下一个阶段: Train policy python act/imitate_episodes.py \ --task_name [TASK] \ --ckpt_dir data/outputs/act_ckpt/[TASK]_waypoint \ --policy_class ACT --kl_weight 10 --chunk_size 50 --hidden_dim 512 --b

【笔记】决策与博弈(上)——Rita_Aloha
目录 Ⅰ. 决策与决策树 一、决策 二、决策树 1.决策树 2.决策树模型 3.特征选择 4.决策树的修剪 5.决策树的生成 6.连续属性下的决策树 7.多变量决策树 Ⅰ. 决策与决策树 一、决策 1.(管理学)定义:所谓决策,就是为了实现某一目的而制定行动方案并从若干个可行方案中选择一个满意方案的分析判断过程。 2.一般决策过程包括: (1)问题识别,即认
【笔记】搜索策略——Rita_Aloha
目录 一、搜索 1.搜索的定义 2.搜索问题的形式化描述 3.搜索的主要过程 4.搜索的方向 二、盲目搜索 1.广度优先搜索 2.深度优先搜索 3.有限深度优先搜索 4.基本回溯策略 5.改进的回溯策略 6.避免多次试探同一个结点的回溯策略 三、启发搜索 1.评价函数(Evaluation Function)f(n) 2.常用算法 (1)分支界限法/有序法
【笔记】神经网络——Rita_Aloha
人工神经网络(Artificial Neural Networks,简写为ANNs)也简称为神经网络(NNs) 一、神经元 1.M-P模型 图中,xᵢ(i=1,2,...,n)表示来自与当前神经元项链的其他神经元传递的输入信号,w~ij~表示从神经元i到神经元j的连接强度或权值,θ~j~表示神经元j的激活阈值或偏置,f表示激活函数或转移函数。神经元的输出x~j~可以表示为如下形式:
opnet之Aloha
创建Aloha模型的五个步骤: 创建发送进程aloha_tx 创建发送节点创建接收进程cct_rx 创建接收节点创建Aloha网络 发送进程aloha_tx: HB: /* Global Variable *///subm_pkts是在cct_rx进程中声明的。为了在aloha_tx进程使用这个变量,需要在aloha_tx的HB中用extern声明extern int subm_pk