本文主要是介绍Mobile ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1. Mobile ALOHA 1
- 1.1 项目地址
- 2. Mobile ALOHA 2
- 2.1 相关链接
- 2.2 What's upgraded in II ?
- Reference
Stanford 最新家务机器人
1. Mobile ALOHA 1
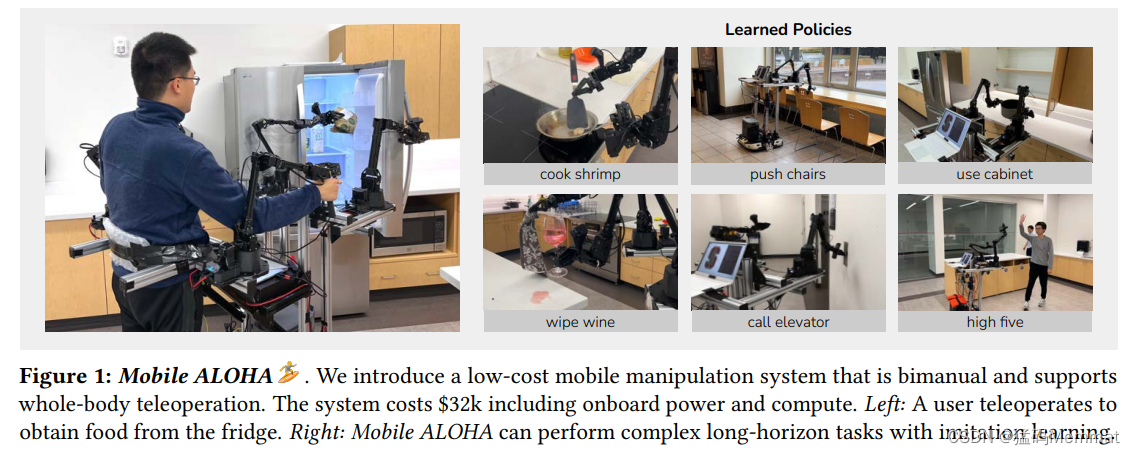
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
1.1 项目地址
https://mobile-aloha.github.io/
2. Mobile ALOHA 2
成本不到20万,联手谷歌DeepMind,完全开源
谷歌 DeepMind 放出了相关论文《ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation》。
2.1 相关链接
论文地址:https://aloha-2.github.io/assets/aloha2.pdf
项目主页:https://aloha-2.github.io/

2.2 What’s upgraded in II ?
为支持对复杂操作任务的研究,在 ALOHA 平台上扩大数据收集的规模成为目标之一,包括使用的机器人数量、每台机器人的数据收集小时数以及数据收集的多样性。这一扩展过程改变了相对于第一代 ALOHA 平台的要求和范围。
对于 ALOHA 2,除了在 ALOHA 平台的基础上建设,研究者还针对以下领域寻求进一步改进:
-
性能和任务范围:增强 ALOHA 性能的关键组件,包括夹持器和控制器,以实现更广泛的操控任务。
-
用户友好性和人体工学:为了优化大规模数据收集,优先考虑用户体验和舒适度,包括改进用户界面系统的响应性和人体工学设计。
-
稳健性:增加系统的稳健性,最大限度地减少因诊断和维修造成的停机时间。这就需要简化机械设计,并确保更大规模的机器人队伍在整体上易于维护。
根据上述目标,ALOHA 2 的具体改进如下:
-
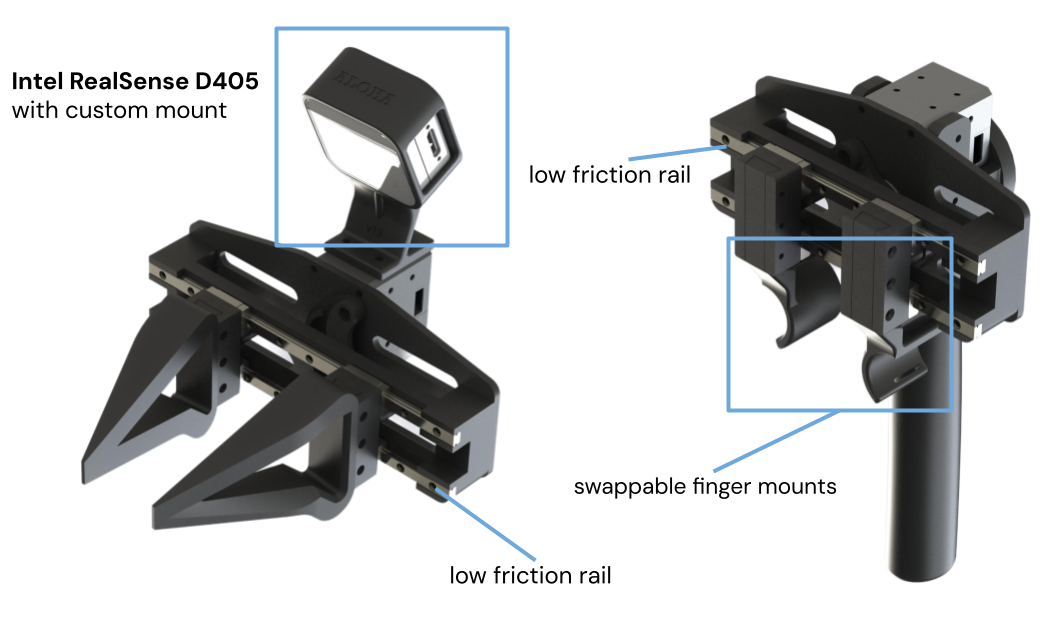
夹持器:研究者为领导机器人和跟随机器人的夹持器设计了新的低摩擦轨道。对于领导机器人,这改善了遥操作的人体工学和响应速度。对于跟随机器人,这改善了延迟和夹持器的力量输出。此外,他们还升级了手指上的抓胶带材料,以提高耐用性和抓取小物体的能力。
-
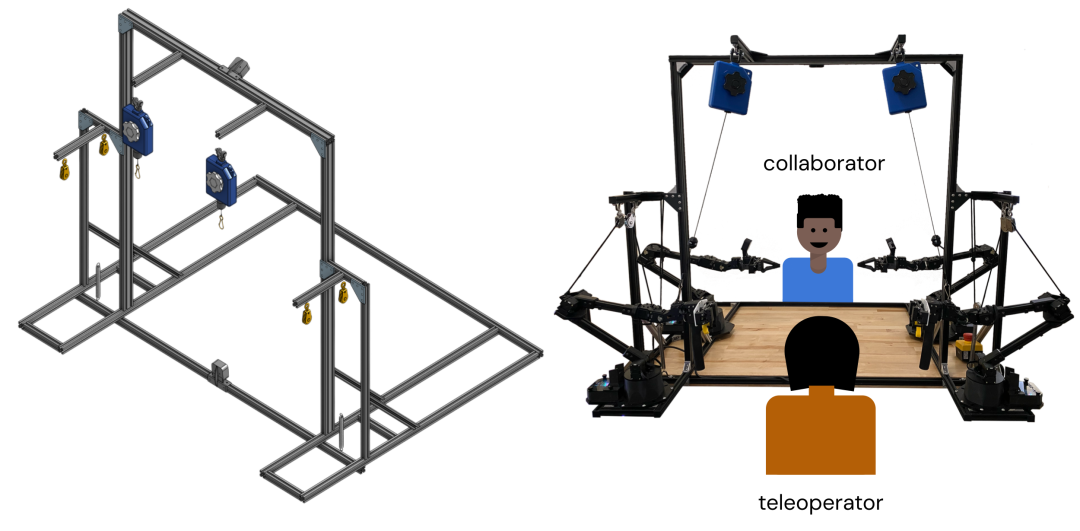
重力补偿:研究者使用现成的组件创建了一个被动的重力补偿机制,与 ALOHA 原有的抓带材料系统相比,这提高了耐用性。
-
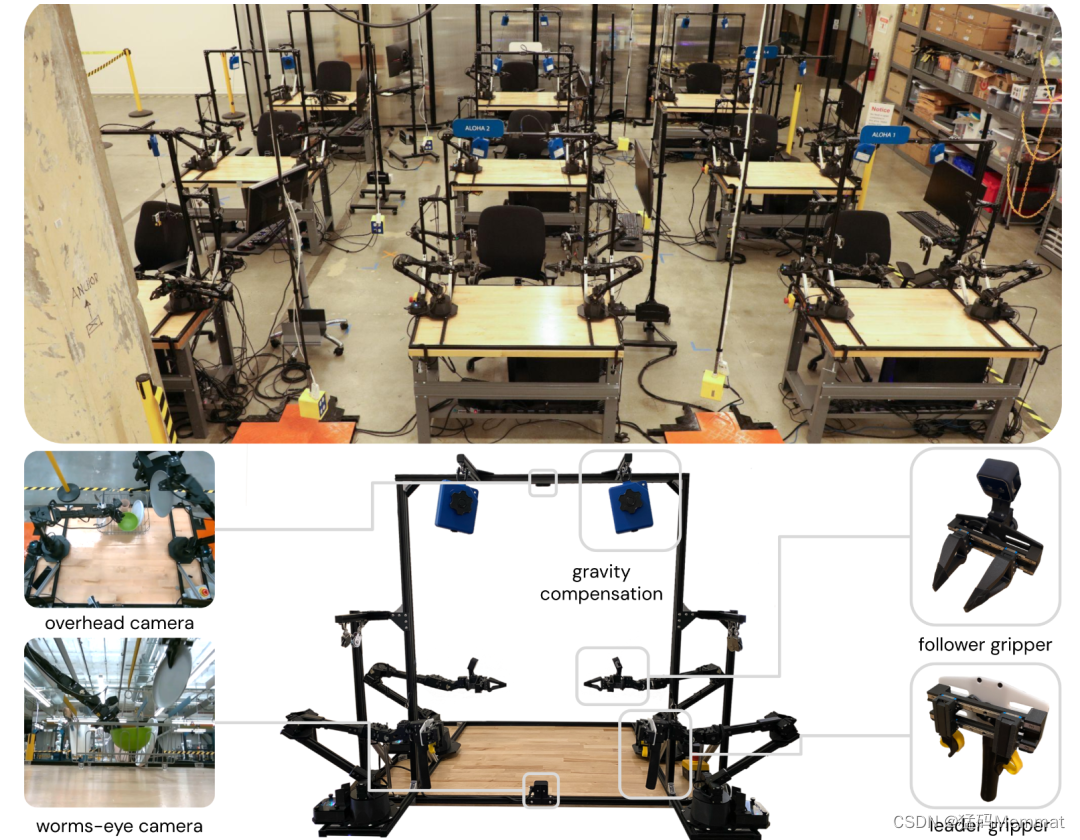
框架:研究者简化了围绕工作单元的框架,同时保持了相机安装点的刚性。这些变化为人机协作者和机器人互动的道具提供了空间。
-
相机:ALOHA 2 使用更小的英特尔 RealSense D405 相机和定制的 3D 打印相机支架,以减小跟随臂的占地面积,从而减少对操作任务的阻碍。这些摄像头还具有更大的视场角、深度、全局快门和更多的定制功能。
-
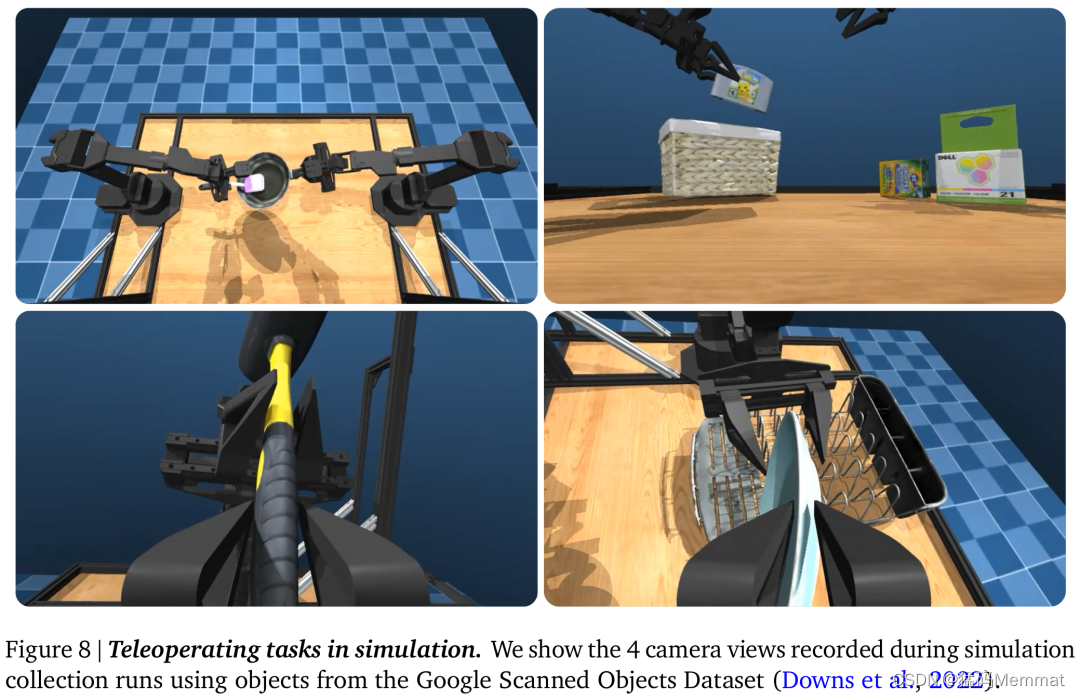
模拟:研究者在 MuJoCo Menagerie 中的 MuJoCo 模型中模拟了 ALOHA 2 机器人的精确规格,从而改进了数据收集、策略学习和模拟评估,以应对具有挑战性的操纵任务。

Reference
https://mp.weixin.qq.com/s/neH70mPjuFQEQ8VPgjmrAA
这篇关于Mobile ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






