teleoperation专题
A Dexterous Hand-Arm Teleoperation System
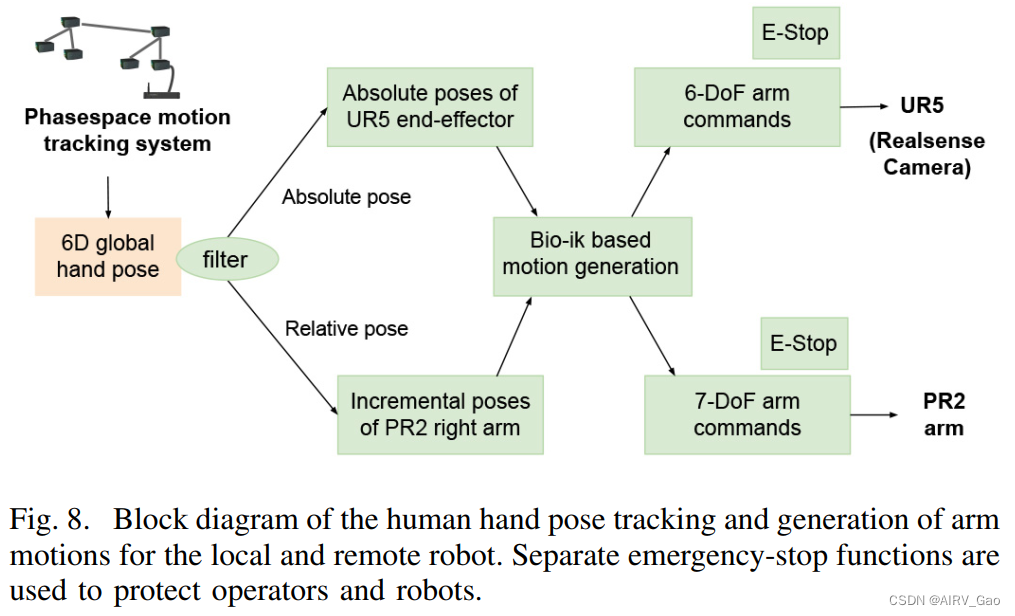
A Dexterous Hand-Arm Teleoperation System Based on Hand Pose Estimation and Active Vision解读 摘要1. 简介2.相关工作2.1 机器人遥操作2.2 主动视觉(Active Vision) 3. 硬件设置4. 基于视觉的机器人手部姿态估计4.1 Transteleop4.2 Dataset 5. 主动视觉
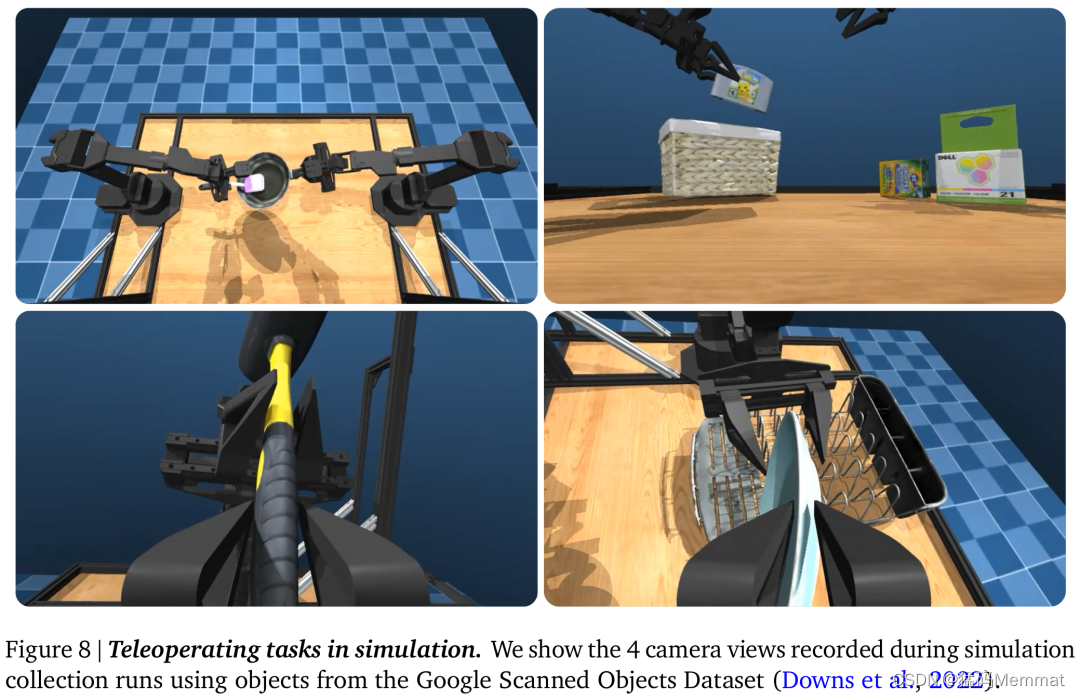
Mobile ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation
文章目录 1. Mobile ALOHA 11.1 项目地址 2. Mobile ALOHA 22.1 相关链接2.2 What's upgraded in II ? Reference Stanford 最新家务机器人 1. Mobile ALOHA 1 Mobile ALOHA: Learning Bimanual Mobile Manipulation with