本文主要是介绍opnet之Aloha,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
创建Aloha模型的五个步骤:
- 创建发送进程aloha_tx
- 创建发送节点
- 创建接收进程cct_rx
- 创建接收节点
- 创建Aloha网络
发送进程aloha_tx:
HB:
/* Global Variable */
//subm_pkts是在cct_rx进程中声明的。为了在aloha_tx进程使用这个变量,需要在aloha_tx的HB中用extern声明
extern int subm_pkts; init入口:
/* Get the maximum packet count, set at simulation run-time */
op_ima_sim_attr_get_int32 ("max packet count", &max_packet_count); - max_packet_count是状态变量,存储着仿真属性
- 之前一直以为仿真属性是在Model Attribute中设置的,这里的仿真属性max packet count是在Global Attribute中定义的
- Model Attribute中设置的属性在上层module上鼠标右键可见,但是Global Attribute鼠标右键不可见。那么Global Attribute是怎么发挥作用的呢?Model Attribute发挥作用的途径是作为模块的属性,在提升之后作为节点的属性。节点的属性就是仿真属性了,可以对其设置仿真序列,将其作为输入量,观察输出量的随着输入量的变化。
- init状态的入口一般做一些统计量注册或者读取属性信息的工作。
这篇关于opnet之Aloha的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!

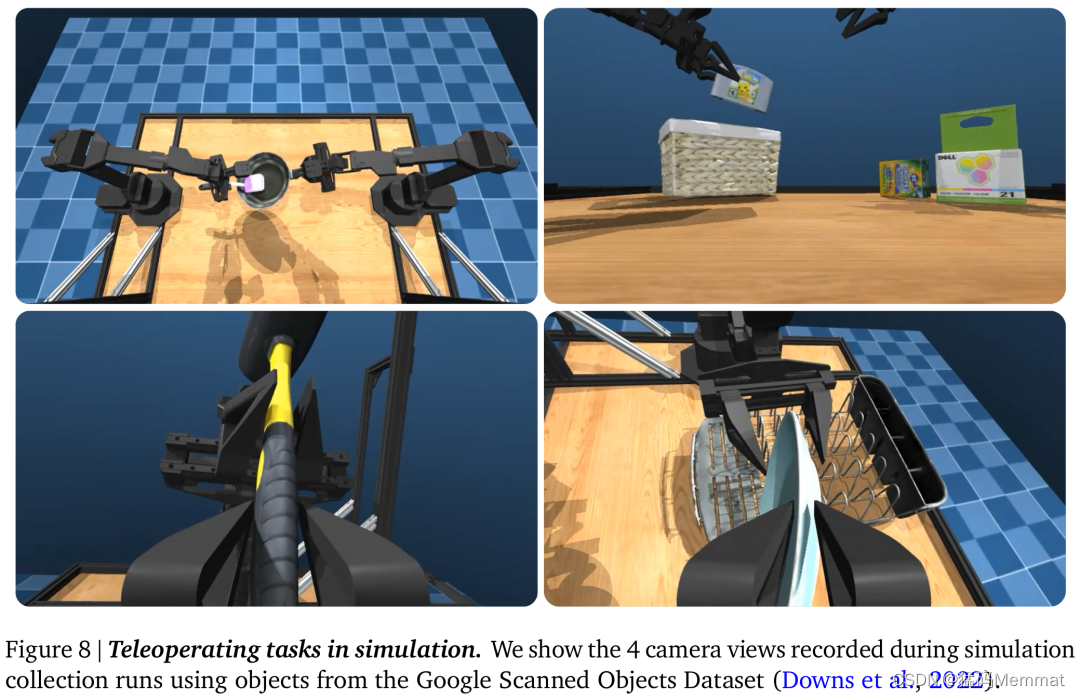
![[论文阅读] mobile aloha实验部分](https://i-blog.csdnimg.cn/direct/ebec028d5656407289b84880992d4b98.png)