鱼眼专题

OmniSLAM:多鱼眼相机的SLAM系统
点云PCL免费知识星球,点云论文速读。 文章:OmniSLAM: Omnidirectional Localization and Dense Mapping for Wide-baseline Multi-camera Systems 作者:Changhee Won, Hochang Seok , Zhaopeng Cui , Marc Pollefeys , and Jongwoo Lim

从普通相机模型到鱼眼畸变模型--标定与去畸变
目录 普通相机模型普通成像模型针孔模型与透镜组:径向畸变切向畸变现代手机摄像头的基本组成内参矩阵 畸变模型张氏标定法 鱼眼模型透镜组r和f的进一步说明等距投影模型(OpenCV::fisheye)鱼眼图像去畸变过程 普通相机模型 普通成像模型 普通相机模型一般通过pin-hole model+径向畸变+切向畸变进行建。 针孔模型与透镜组: 针孔模型即小孔成像模型,近代的摄
【鱼眼镜头11】Kannala-Brandt模型和Scaramuzza多项式模型区别,哪个更好?
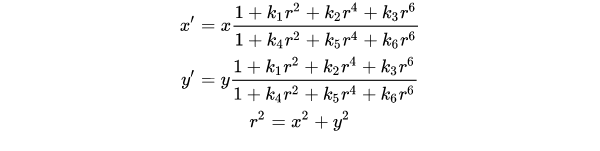
Kannala-Brandt模型和Scaramuzza多项式模型在描述鱼眼相机畸变时都有其特定的数学表示和应用,但它们之间存在一些区别。以下是对两者区别的分点表示和归纳: 数学表示: Kannala-Brandt模型:它假设图像光心到投影点的距离和角度的多项式存在比例关系。具体地,它涉及到相机坐标系、图像坐标系、物点坐标、入射角、畸变像点和非畸变像点等参数,并通过这些参数之间的关系来描述径向畸

【鱼眼+普通相机】相机标定
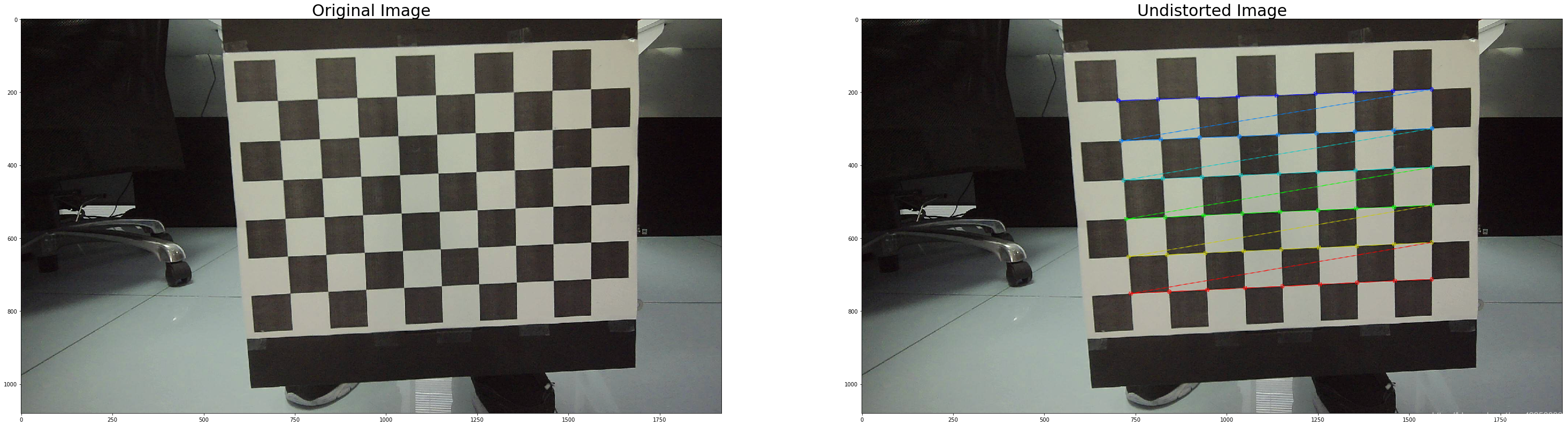
一、简介 本文提供了鱼眼及普通相机的标定python版源码,调用opencv的接口,原理为张正友标定法。这里不过多赘述,话不多说无套路直接上源码,亲测有效,搬走即用。 注: 需准备一个标定版,在此网站下载打印出来即可;例如12x8的棋盘格内角点为11x7. 二 、源码 2.1 鱼眼相机标定 """~~~~~~~~~~~~~~~~~~~~~~~~~~鱼眼相机标定~~~~~~~~

使用OpenCV标定鱼眼镜头(C++)
使用OpenCV标定鱼眼镜头(C++) 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 一、使用的函数 由于鱼眼镜头和针孔镜头的模型不一样,对于鱼眼镜头的模型在之前的博客中已经做了详细介绍,这里直接使用OpenCV中的cv::fisheye::calibrate(
Kannala-Brandt 鱼眼相机模型
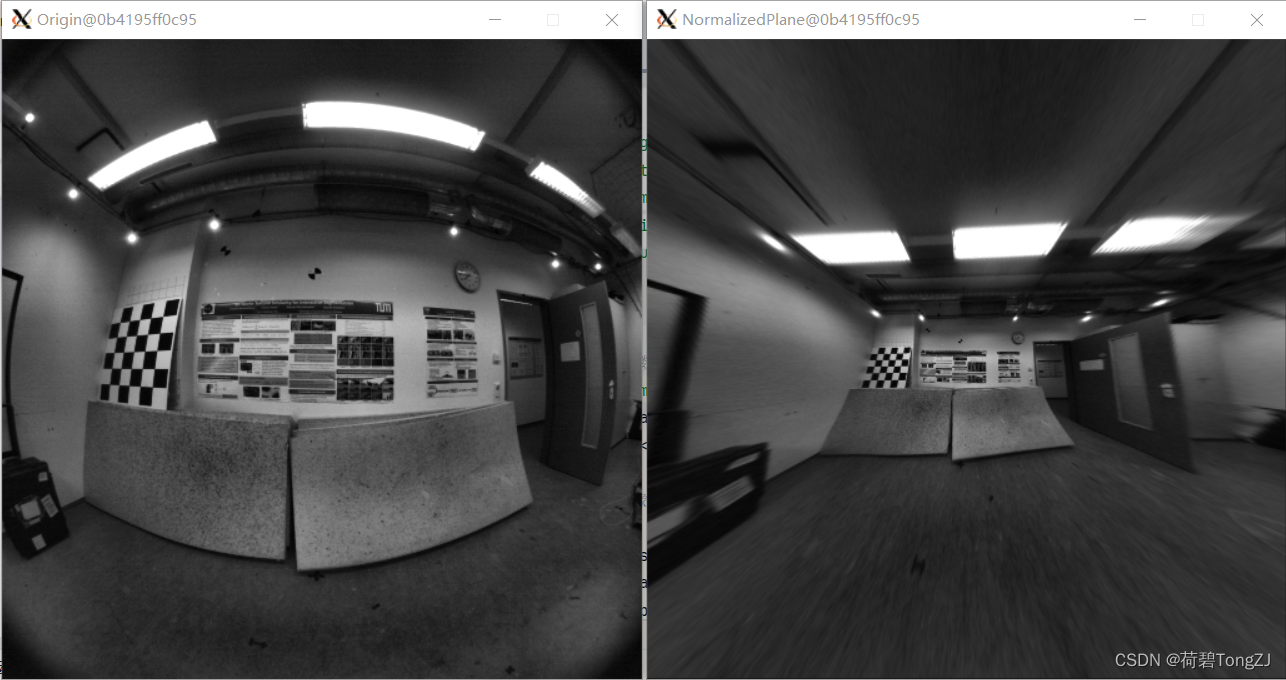
最近在学习 ORB-SLAM3 的源代码,并模仿、重构了相机模型的实现 在学习的过程中发现针孔相机 (Pinhole) 与鱼眼相机 (Fisheye) 都有畸变参数,但是鱼眼相机无法使用 cv::undistort 函数去畸变 在对鱼眼相机的深度归一化平面进行可视化后,发现鱼眼相机真的不需要去畸变 参考文献:A generic camera model and calibration met

鱼眼相机(畸变)内参标定方法及代码实例
概述 鱼眼镜头指视角接近或等于180°的镜头,视角为众多镜头之冠。这类镜头一般焦距极短,在135底片格式下,16毫米或焦距更短的镜头通常即可认为是鱼眼镜头,绝大部分的鱼眼镜头均是定焦镜头,只有少部分是变焦镜头。依成像可分为圆形鱼眼(Circular fisheye,又称全周鱼眼,画面呈圆形)与对角线鱼眼(Diagonal fisheye或Full-frame fisheye,画面呈方形)其镜面似

语义分割——自动驾驶鱼眼数据集
一、重要性及意义 环境感知:语义分割技术能够精确识别道路、车辆、行人、障碍物、交通标志和信号等各种交通场景元素。这为自动驾驶系统提供了丰富的环境信息,有助于车辆准确理解周围环境的结构和动态变化。决策规划:基于语义分割的结果,自动驾驶系统可以更加智能地进行决策和规划。例如,系统可以根据道路类型、车道线、交通标志等信息,规划出合适的行驶路径和速度。同时,通过识别行人、车辆等障碍物,系统可以预测它们的

标定系列——基于OpenCV实现普通相机、鱼眼相机不同标定板下的标定(五)
标定系列——基于OpenCV实现相机标定(五) 说明代码解析VID5.xmlin_VID5.xmlcamera_calibration.cpp 说明 该程序可以实现多种标定板的相机标定工作 代码解析 VID5.xml <?xml version="1.0"?><!-- 相机拍摄的标定板图像路径名 --><opencv_storage><images>images/C
![鱼眼相机的测距流程及误差分析[像素坐标系到空间一点以及测距和误差分析]](https://img-blog.csdnimg.cn/direct/07bb974a9eff4c16a7c897d0535b04d5.png)
鱼眼相机的测距流程及误差分析[像素坐标系到空间一点以及测距和误差分析]
由于最近在整理单目测距的内容,顺手也总结下鱼眼相机的测距流程和误差分析,如果有错误,还请不吝赐教。 参考链接: 鱼眼镜头的成像原理到畸变矫正(完整版) 相机模型总结(针孔、鱼眼、全景) 三维空间中判断射线与平面是否相交 相机外参标定误差对目标测距的影响分析(待整理) 像素坐标转到世界坐标时相机坐标系中的Zc值求解 一文简要介绍鱼眼镜头/相机投影成像过程 一文详解分析鱼眼相机投影成像模型和畸变模型

Python OpenCV 单目相机标定、坐标转换相关代码(包括鱼眼相机)
前言 本文不讲原理,只关注代码,有很多博客是讲原理的,但是代码最多到畸变矫正就结束了,实际上就是到 OpenCV 官方示例涉及的部分。 在官方示例中使用黑白棋盘格求解了相机的内外参和畸变系数,并对图像做了畸变矫正,但在实际使用时还缺少很多功能,以下是本文包含的部分: (1)按实际应用场景求解外参,棋盘格的外参是相对于棋盘格的世界坐标系的,无法直接使用; (2)在实际场景下,不使用棋盘格,
相机与相机模型(针孔/鱼眼/全景相机)
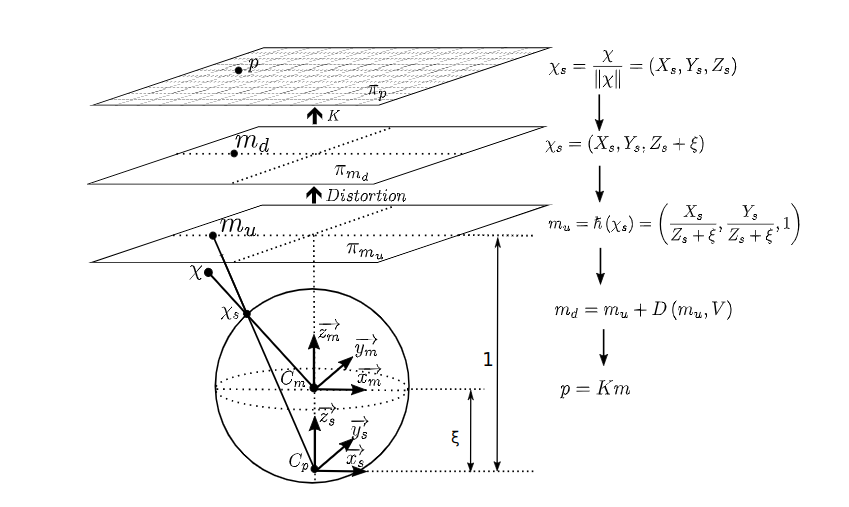
0. 摘要 本文旨在较为直观地介绍相机成像背后的数学模型,主要的章节组织如下: 第1章用最简单的针孔投影模型为例讲解一个三维点是如何映射到图像中的一个像素 第2章介绍除了针孔投影模型外其他一些经典投影模型,旨在让读者建立不同投影模型之间的建模过程 第3章介绍如何把不同的投影模型用一个统一的投影过程表达 第4章进一步补充第三章的统一投影模型,并介绍畸变的定义和去畸变的原理 第5章针对全

车路协同中 CUDA 鱼眼相机矫正、检测、追踪
在车路协同中,鱼眼一般用来补充杆件下方的盲区,需要实现目标检测、追踪、定位。在目标追踪任务中,通常的球机或者枪机方案,无法避免人群遮挡的问题,从而导致较高的ID Swich,造成追踪不稳定。但是鱼眼相机的顶视角安装方式,天然缓解了遮挡的问题,从而实现杆件下方的盲区问题 1、鱼眼相机原理介绍 相机镜头大致上可以分为变焦镜头和定焦镜头两种。顾名思义,变焦镜头可以在一
从开源项目聊鱼眼相机的“360全景拼接”
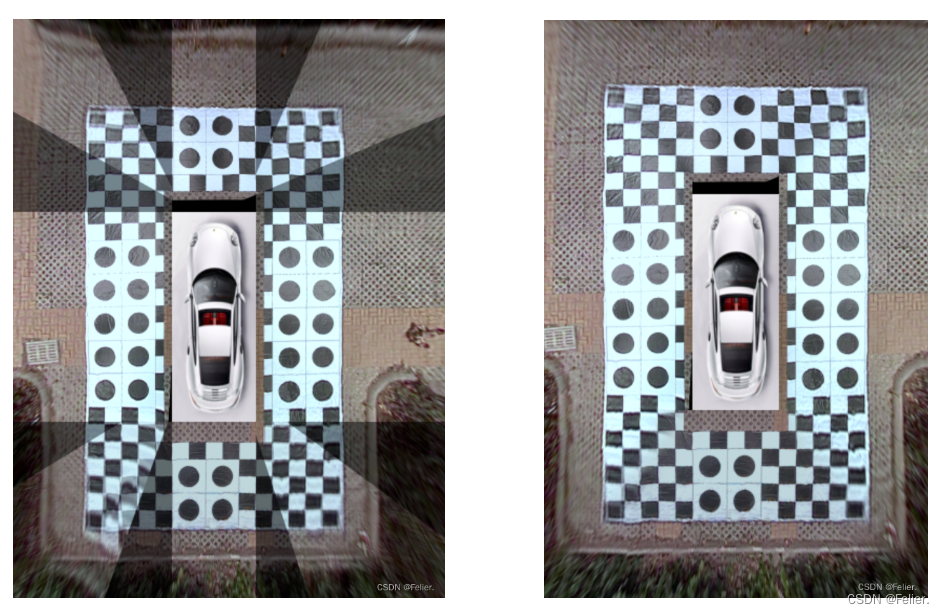
目录 概述 从360全景的背景讲起 跨过参数标定聊透视变化 拼接图片后处理 参考文献 概述 写这篇文章的原因完全源于开源项目(GitHub参阅参考文献1)。该项目涵盖了环视系统的较为全貌的制作过程,包含完整的标定、投影、拼接和实时运行流程。该篇文章主要是梳理全景拼接技术中的一些实现细节,并在些地方记录了自己的思考。鉴于该开源项目,后续将计划:(1)基于自动驾驶

【6】opencv采用映射技术实现鱼眼镜头校正和鱼眼镜头还原全景图。
相关文章: 【1】windows下安装OpenCV(4.3)+VS2017安装+opencv_contrib4.3.0配置 【2】Visual Studio 2017同时配置OpenCV2.4 以及OpenCV4.3 【3】opencv_contrib4.3.0库配置+opencv安装 【4】配置和运行Opencv常见的一些问题总结,以及bug解决。 【5】OpenCV2.4.9实现图像
车路协同中 CUDA 鱼眼相机矫正、检测、追踪
在车路协同中,鱼眼一般用来补充杆件下方的盲区,需要实现目标检测、追踪、定位。在目标追踪任务中,通常的球机或者枪机方案,无法避免人群遮挡的问题,从而导致较高的ID Swich,造成追踪不稳定。但是鱼眼相机的顶视角安装方式,天然缓解了遮挡的问题,从而实现杆件下方的盲区问题 1、鱼眼相机原理介绍 相机镜头大致上可以分为变焦镜头和定焦镜头两种。顾名思义,变焦镜头可以在一

0基础学习VR全景平台篇第129篇:认识单反相机和鱼眼镜头
上课!全体起立~ 大家好,欢迎观看蛙色官方系列全景摄影课程! 一、相机 单反和微单 这里说的相机是指可更换镜头的单反/微单数码相机。那两者有何差异呢? 1)取景结构差异 两者最直观的区别在于,微单相机为减轻重量、缩小体积,取消了传统单反相机里反光镜、五棱镜这些光学取景结构,改用电子取景。所以,微单相机更严谨的名称是“无反”。 2)测光方式的差异 微单相机的测光过程完全由相机的感光元

SLAM学习——相机模型(针孔+鱼眼)
针孔相机模型 针孔相机模型是很常用,而且有效的模型,它描述了一束光线通过针孔之后,在针孔背面投影成像的关系,基于针孔的投影过程可以通过针孔和畸变两个模型来描述。 模型中有四个坐标系,分别为world,camera,image,pixel world为世界坐标系,可以任意指定 x w x_w xw轴和 y w y_w yw轴,为上图P点所在坐标系。 camera为相机坐标系,原点位于小
代客泊车的环视图鱼眼BEV感知的数据集、基线方法和克服畸变的多任务框架
点云PCL免费知识星球,点云论文速读。 文章:Surround-view Fisheye BEV-Perception for Valet Parking: Dataset, Baseline and Distortion insensitive Multi-task Framework 作者:Zizhang Wu1& Yuanzhu Gan1& Xianzhi Li2∗ Yunzhe Wu1

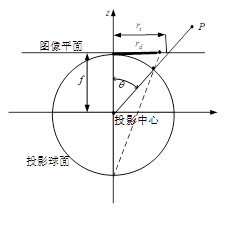
鱼眼图像校正(球面等距投影模型)_|||
接着上一篇博客的讲解,本次博客主要工作是完成了基于等距模型的鱼眼图像球面投影校正算法。解决了上周实现鱼眼图像校正时的以下几个问题: 1, 图像坐标中心位移问题。 2, 目标图像映射大小问题。 3, 图像插值问题。 对于鱼眼图像的校正问题来讲,首先我们需要明确等距模型只是给出了入射角和相机焦距之间的关系。这个关系的使用本质上还是需要带入到球面模型或者抛物面模型中取求解坐标映射关系。其

一文讲透鱼眼相机畸变矫正,及目标检测项目应用 值得收藏
1 个人介绍 大家好,我是潘大强。 目前博士毕业4年,主要从事智能安防行业。 之前也分享过AI从业的一些心得,个人介绍链接。 应大白的邀请,从AI从业者的角度,分享工作中遇到的一些经验。 之前在江大白的群里,看到有同学提问“鱼眼相机标定”的问题。 对于鱼眼相机的标定和矫正,网上已经有很多理论文章,但是落实到代码层面的并不多,而且大部分代码都是C++实现。 但是做AI的同学,大多

全景图片(鱼眼)的平面映射矫正
最近做了一个全景图片平面映射的工作,就是将一个360度的全景球面照片映射到一个平面上,使之看上去没有变形。由于网上的一些鱼眼照片的校正程序不好用,自己通过球体的三角计算,找到了映射效果较好的方法。写博客以备忘。先看看效果。 做完以后又进行了一些改造,使程序变成一个可变大小,可变角度的相对较通用的程序。本人能力偏弱,只能用笨办法想问题,不足之处敬请海涵。 主要的
从开源项目聊鱼眼相机的“360全景拼接”
目录 概述 从360全景的背景讲起 跨过参数标定聊透视变化 拼接图片后处理 参考文献 概述 写这篇文章的原因完全源于开源项目(GitHub参阅参考文献1)。该项目涵盖了环视系统的较为全貌的制作过程,包含完整的标定、投影、拼接和实时运行流程。该篇文章主要是梳理全景拼接技术中的一些实现细节,并在些地方记录了自己的思考。鉴于该开源项目,后续将计划:(1)基于自动驾驶
鱼眼相机标定-基于张正友标定法
鱼眼相机标定 前段时间曾经做过一段时间的摄像头标定,这里对以前做的事情做一个总结。这里介绍一下鱼眼相机的标定吧,也是相机标定的第二部分,主要还是代码解析和一些细节说明,为了让自己更好的理解相机标定,标定目的是为了实现坐标转换,通过摄像头测定相机的内参和外参之后,需要基于公式得到精确的坐标转换矩阵。(涉及公司项目,这里就不贴图了) 思路详解 相机代码见 https://github.com/w