航拍专题

<数据集>航拍车辆识别数据集<目标检测>
数据集格式:VOC+YOLO格式 图片数量:9273张 标注数量(xml文件个数):9273 标注数量(txt文件个数):9273 标注类别数:3 标注类别名称:['car', 'truck', 'bus'] 序号类别名称图片数框数1car92352571072truck5256188723bus29698450 使用标注工具:labelImg 标注规则:对类别进行画水平矩形框

Web GIS 航拍实现的智慧园区数字孪生应用
前言 随着智慧城市建设的不断发展,智慧园区作为智慧城市的先行区,其覆盖区域越来越大,产值越来越集中,对于园区数字化建设和智能化管理的诉求也愈加强烈。园区数字化管理是以实现园区多维度业务数据汇聚、融合、共享,通过可视化技术将园区运维进行一体化管理,进而实现一区多园的建设,推进城市的数字化和智能化的建设。 通过图扑软件的可视化引擎以及地理信息系统(Geographic Information
![[数据集][目标检测]航拍屋顶检测数据集VOC+YOLO格式458张3类别](https://i-blog.csdnimg.cn/direct/dcf5ba6064ca493c8bb4d1e85a835602.png)
[数据集][目标检测]航拍屋顶检测数据集VOC+YOLO格式458张3类别
数据集格式:Pascal VOC格式+YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):458 标注数量(xml文件个数):458 标注数量(txt文件个数):458 标注类别数:3 标注类别名称:["roof","roof_asb","roof_asb_notsure"] 每个类别标注的框数: roo

<数据集>无人机航拍不同高度牧羊识别数据集<目标检测>
数据集格式:VOC+YOLO格式 图片数量:6065张 标注数量(xml文件个数):6065 标注数量(txt文件个数):6065 标注类别数:1 标注类别名称:['sheep'] 序号类别名称图片数框数1sheep6065149785 使用标注工具:labelImg 标注规则:对类别进行画水平矩形框 图片示例: 标注示例:

<数据集>航拍牧场牛羊识别数据集<目标检测>
数据集格式:VOC+YOLO格式 图片数量:1021张 标注数量(xml文件个数):1021 标注数量(txt文件个数):1021 标注类别数:3 标注类别名称:['cattle', 'cow', 'sheep'] 序号类别名称图片数框数1cattle29741282cow674013sheep6579518 使用标注工具:labelImg 标注规则:对类别进行画水平矩形框 图片

航拍无人机像素坐标转世界坐标
一、背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 二、代码 import numpy as np import cv2 # 畸变校正 def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist): k0
无人机航拍端午赛龙舟:EasyCVR/EasyDSS视频推流直播技术助力赛事传播
随着科技的飞速发展,无人机技术已经渗透到我们生活的各个方面,从农业监测到地质勘探,从城市规划到影视拍摄,其应用越来越广泛。而在近年来,无人机技术也被引入到传统的赛龙舟活动中,为这一古老而充满活力的文化盛宴增添了全新的视角和体验。 在过去的端午假期中,各地的赛龙舟活动频繁登上热搜新闻。赛龙舟作为中国传统文化的重要组成部分,以其独特的魅力和激情吸引着成千上万的观众。然而,传统的观看方式往往受限于视角

python实现无人机航拍图片像素坐标转世界坐标
背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 脚本 import numpy as npimport cv2# 畸变校正def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist):k0,k1,k2,k3

唐山无人机航拍,唐山无人机建模,唐山数据孪生
随着数字经济发展,各地逐渐兴起了无人机低空经济;尤其是无人机航拍,无人机建模;目前技术很成熟;比如水利部提出的数字孪生,四预的实现,都要通过无人机采集底层数据; 目前无人机建模比较成熟的机型有 大疆M3E+RTK,大疆M350 RTK等多款硬件产品,结合对应的软件实现对航拍进行建模; 当然购买相应的行业无人机是前提了,这里不再广告了; 基本流程: 1)公司申请运行许可证
Unity读取GDAL格式航拍图的经纬度,高程,像素值
最近在做一个项目:依赖大疆航拍数据,在应用中渲染航拍图片,并获取每个点位的经纬高。 gdal解析工具:https://www.gisinternals.com/query.html?content=filelist&file=release-1930-x64-gdal-3-6-3-mapserver-8-0-0.zip 资源分析:

基于深度学习的机场航拍小目标检测系统(网页版+YOLOv8/v7/v6/v5代码+训练数据集)
摘要:在本博客中介绍了基于YOLOv8/v7/v6/v5的机场航拍小目标检测系统。该系统的核心技术是采用YOLOv8,并整合了YOLOv7、YOLOv6、YOLOv5算法,从而进行性能指标的综合对比。我们详细介绍了国内外在机场航拍小目标检测领域的研究现状、数据集处理过程、算法原理、模型构建与训练代码,以及基于Streamlit的交互式Web应用界面设计。在该Web应用界面中,用户不仅可以上传图像、

航拍数据发布及浏览解决方案
Bigemap GIS大数据 数据处理与开发应用一站式解决方案 技术服务:数据中心 + 桌面端 + 移动端(APP) + WEB端 关 键 词:地图 导航 定位 编辑 开发 分析 智慧 可视化 (以上产品均可立即下载体验) 以技术孵化产
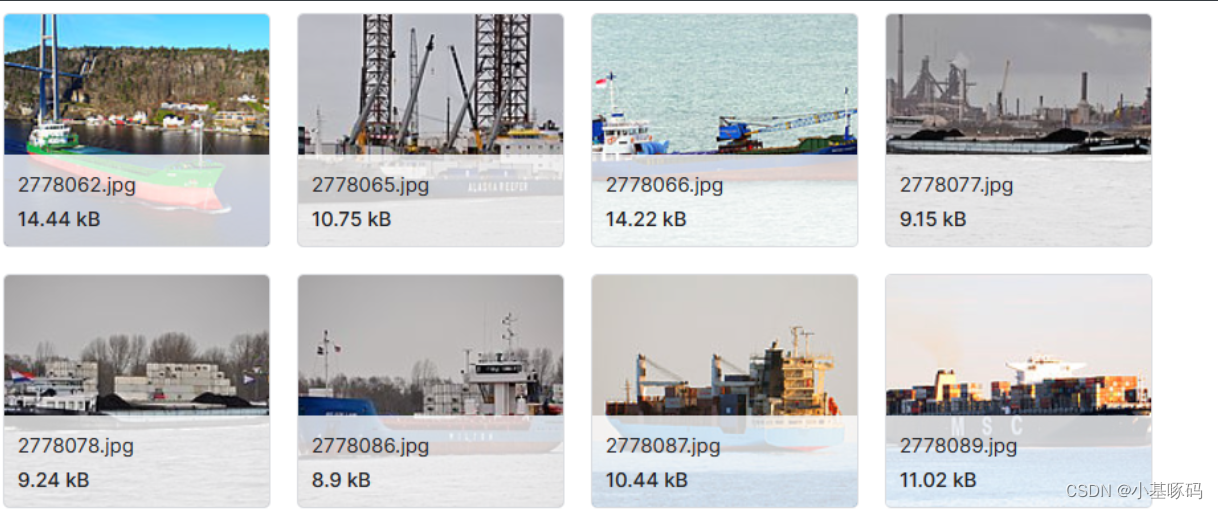
无人机航拍图像数据集汇总
引言 最近的项目涉及到对无人机航拍图像的目标检测,检测的目标包含车辆、人、无人机、船舶,比较热门的航拍数据集大多是遥感图像的数据集,与本项目相关的数据集查找不易,本文分享一下相关的航拍数据数据集,以及数据集的处理方法。 文中部分数据集已经下载,需要获取文中涉及到的数据集请私信(目录中的文件名是本人为了方便自己定义的) 数据集处理 1、获取感兴趣的类别 在训练过程中,数据集中的部分类别使用

无人机航拍图像拼接与目标识别
一、简介 无人机用来做图像侦察是常见功能,现有技术基本是无人机对某片区域进行飞行,人工实时监控飞行图像,将图像录制成视频供事后回放。此方法对人员业务要求比较高、反应速度足够快、不利于信息收集、录制视频丢失空间信息、对于后期开展区域分析困难。 羚控地理态势系统可将无人机航拍图像:可见光、红外、SAR雷达图像数据,几万甚至几十万张无人机航拍图像,拼接处理成地图瓦片数据,可叠加到
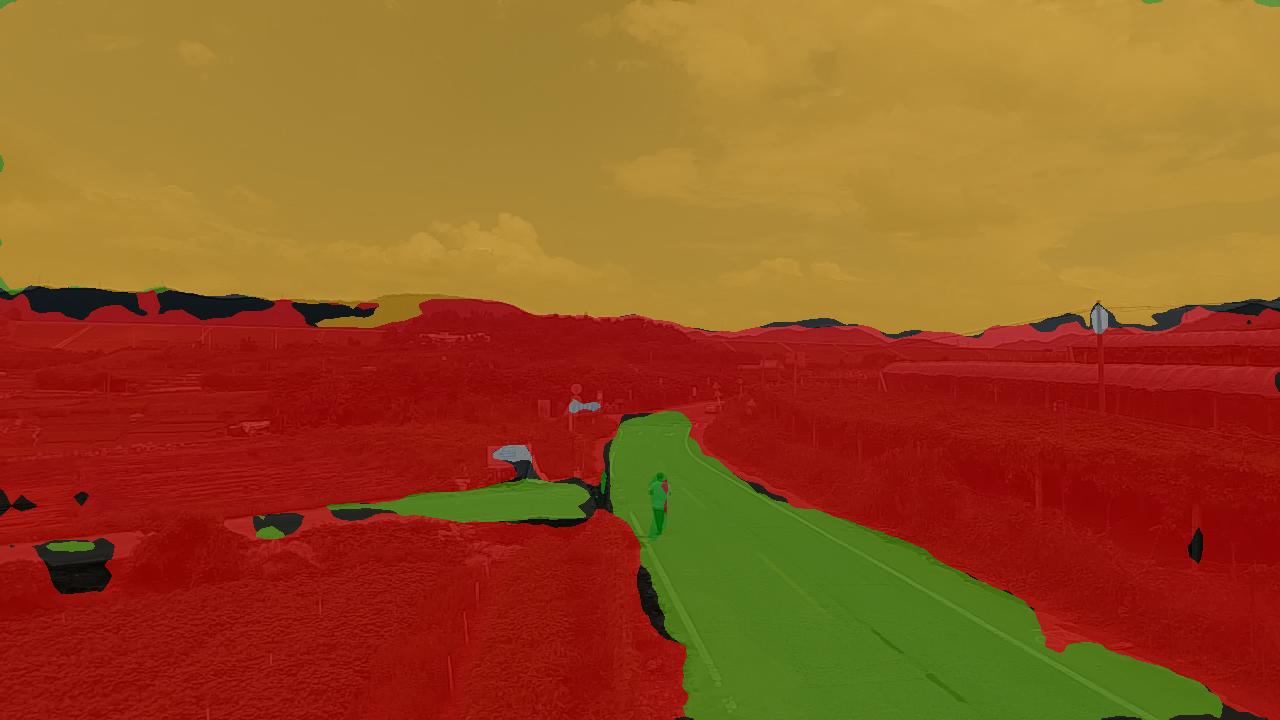
基于DeepLabV3Plus实现无人机航拍目标分割识别系统
最近相信大家都在或多或少地经历着阳的风波吧,也都对出门没有了兴趣,我在无意间找到了新的兴趣点就是无人机,无人机把玩起来还是挺有意思的,正好前面做了一些分割的项目,就想着基于实景的无人机航拍数据来进行实景分割玩一下,直接看下效果: 感觉在处理实景数据的时候还是有些瑕疵的,后续在研究下。 看下实际标注的效果: 关于DeepLabV3Plus的项目可以直接看我之前的相关文章
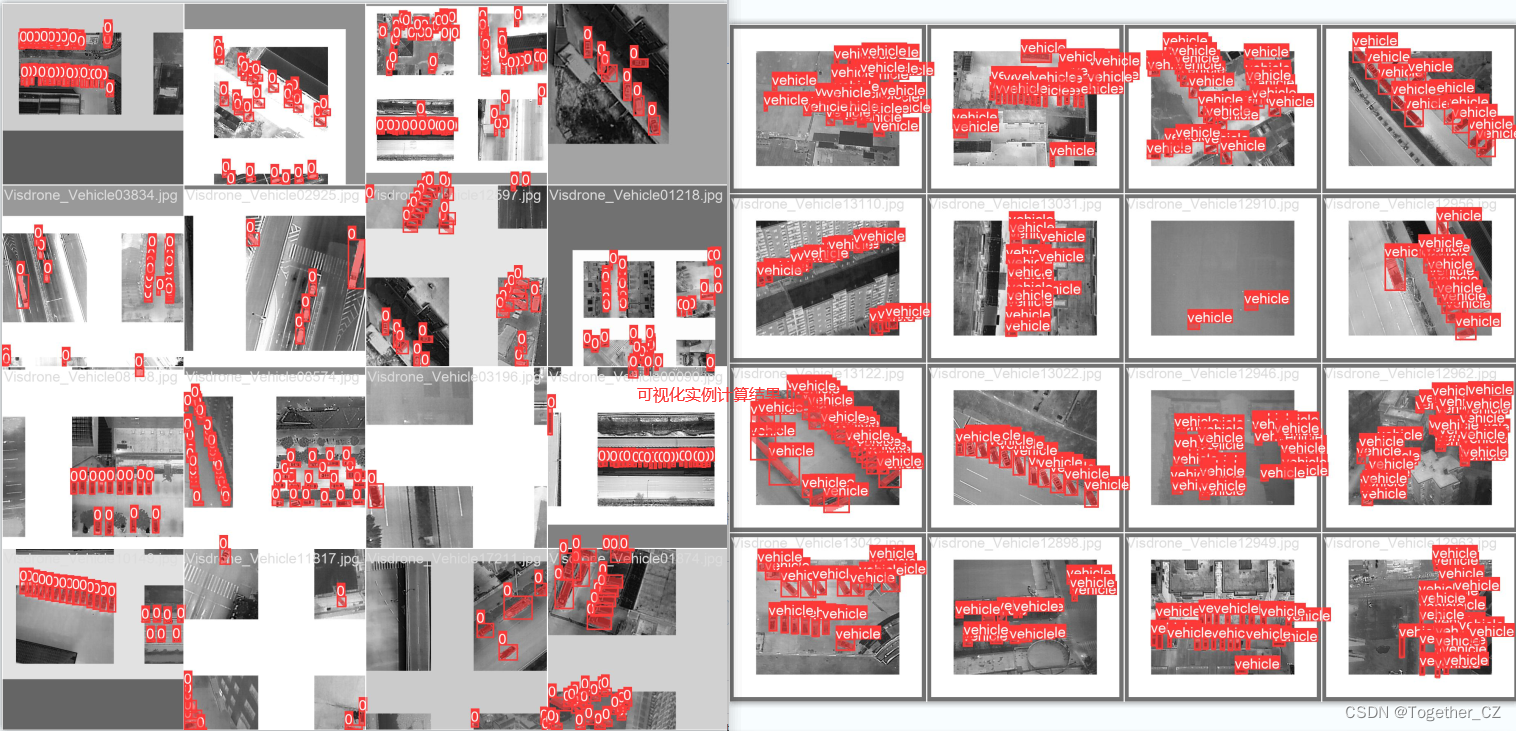
基于YOLO开发构建红外场景下无人机航拍车辆实例分割检测识别分析系统
在我之前的博客中关于车辆检测、无人机航拍车辆检测、遥感车辆检测计数等都有实践性质的文章,感兴趣的话可以看下: 《基于目标检测的无人机航拍场景下小目标检测实践》 《基于YOLOv6m目标检测模型开发构建大雾天气下行人车辆检测识别分析系统》 《基于目标检测实现遥感场景下的车辆检测计数》 这里也是在做车辆相关的检测识别,只不过有两个不同点: 场景不同,这里的场景为红外场景下由无人机航拍获取的数据 目的
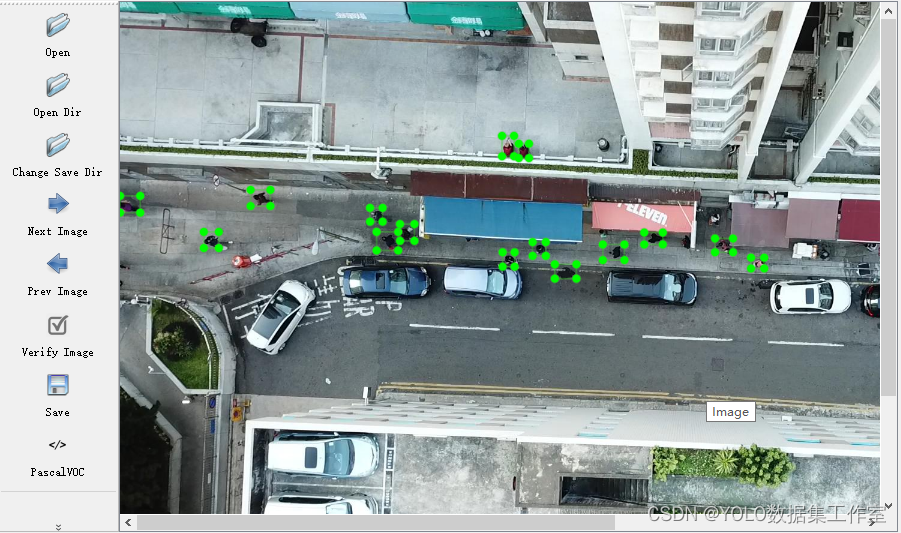
YOLO目标检测——无人机航拍行人检测数据集下载分享【含对应voc、coc和yolo三种格式标签】
实际项目应用:智能交通管理、城市安防监控、公共安全救援等领域数据集说明:无人机航拍行人检测数据集,真实场景的高质量图片数据,数据场景丰富标签说明:使用lableimg标注软件标注,标注框质量高,含voc(xml)、coco(json)和yolo(txt)三种格式标签,分别存放在不同文件夹下,可以直接用于YOLO系列的目标检测。其他:附赠YOLO环境部署、训练案例教程和数据集划分脚本,可以根据需求

【GlobalMapper精品教程】067:基于无人机航拍照片快速创建正射影像图
文章目录 一、加载无人机照片二、创建正射影像三、导出正射影像四、worldImagery比对 一、加载无人机照片 打开globalmapper软件,点击打开数据文件。 选择配套实验数据data067.rar中的影像,Ctrl+A全选。 在globalmapper中,可以直接将照片加载为如下样式。 二、创建正射影像 切换到数字换工具,在地图上框选所有照片。

openmvg+openmvs+无人机航拍测试数据
根据测试数据里边的脚本进行运行,数据是openmvg github上下载的。找不到可以找我,哈哈。 总结下经过的步骤: 1、利用样例数据的脚本,对数据进行处理,输出结果是稀疏的电云 2、将生成的结果转位mvs能够处理的结果。 3、利用mvs进行生成稠密电云、网格、根据网格贴图操作。 第一步:生成json文件 第二步:生成大量文件 第三步: 生

数据集 | CitySim: 最大、最全、最丰富的无人机航拍车辆轨迹数字孪生开源数据集...
写在前面 随着无人机的普及和计算机视觉技术的发展,高精度航拍视角车辆轨迹数据成为了当下诸多热点的研究方向的基础,包括基于冲突的安全分析,驾驶行为建模,自动驾驶算法、主动交通安全和互联交通安全应用。 今天为大家介绍的是当下数据量最大,道路类型最全,数据内容最丰富的无人机航拍车辆轨迹&数字孪生开源数据集:CitySim。该数据集由美国中佛罗里达大学Dr. Aty团队的郑欧博士,岳李圣飒博士,博士生
实践航拍小目标检测,基于YOLOv7【tiny/l/x】不同系列参数模型开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可: 《deepLabV3Plus实现无人机航拍目标分割识别系统》 《基于目标检测的无人机航拍场景下小目标检测实践》 《助力环保河道水质监测,基于yolov5全系列模型【n/s/m/l/x】开发构建不同参数量级的无人机航拍河道污染漂浮物船只目标检测识别系统,集成GradCAM对模型检测识别能力进行分析》

实践航拍小目标检测,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可: 《deepLabV3Plus实现无人机航拍目标分割识别系统》 《基于目标检测的无人机航拍场景下小目标检测实践》 《助力环保河道水质监测,基于yolov5全系列模型【n/s/m/l/x】开发构建不同参数量级的无人机航拍河道污染漂浮物船只目标检测识别系统,集成GradCAM对模型检测识别能力进行分析》
实践航拍小目标检测,基于轻量级YOLOv7tiny开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可: 《deepLabV3Plus实现无人机航拍目标分割识别系统》 《基于目标检测的无人机航拍场景下小目标检测实践》 《助力环保河道水质监测,基于yolov5全系列模型【n/s/m/l/x】开发构建不同参数量级的无人机航拍河道污染漂浮物船只目标检测识别系统,集成GradCAM对模型检测识别能力进行分析》
实践航拍小目标检测,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可: 《deepLabV3Plus实现无人机航拍目标分割识别系统》 《基于目标检测的无人机航拍场景下小目标检测实践》 《助力环保河道水质监测,基于yolov5全系列模型【n/s/m/l/x】开发构建不同参数量级的无人机航拍河道污染漂浮物船只目标检测识别系统,集成GradCAM对模型检测识别能力进行分析》

航拍无人机技术,航拍无人机方案详解,无人机摄影技术
航拍无人机是利用遥控技术和摄像设备,在空中进行拍摄和录像的无人机。这种无人机通常具有高清摄像设备、图像传输设备、GPS定位系统、智能控制系统等,可以轻松实现各种拍摄角度和高度,广泛应用于影视制作、旅游景区航拍、城市规划、环保监测等领域。 航拍无人机产品背景 无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用