本文主要是介绍数据集 | CitySim: 最大、最全、最丰富的无人机航拍车辆轨迹数字孪生开源数据集...,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
写在前面
随着无人机的普及和计算机视觉技术的发展,高精度航拍视角车辆轨迹数据成为了当下诸多热点的研究方向的基础,包括基于冲突的安全分析,驾驶行为建模,自动驾驶算法、主动交通安全和互联交通安全应用。
今天为大家介绍的是当下数据量最大,道路类型最全,数据内容最丰富的无人机航拍车辆轨迹&数字孪生开源数据集:CitySim。该数据集由美国中佛罗里达大学Dr. Aty团队的郑欧博士,岳李圣飒博士,博士生王子衿等人于2022年推出,并在持续更新中。
交通邦往期数据集汇总
✦
✦
最大,最全,最精准,最丰富
◾ 最大: 数据量最大。CitySim数据集提供超过来自多个国家不同天气、不同地点的无人机航拍数据,时长总计超过1200分钟, 包含万辆车的轨迹。
◾ 最全:道路类型最全。数据集采集了高速公路基本路段、高速公路匝道汇入/汇出、城市快速路、合流分流交织区、信控交叉口、环岛等多个地点, 是目前行业内覆盖范围最全的数据集,可满足研究的多样化需求。
◾ 最精准:精度最高/更微观。行业内唯一提供7个车辆关键点(BoundingBox)坐标信息的数据集。每个数据框都经过人工检查/矫正,以确保数据精度。
◾ 最系统:行业内唯一个集 Sumo-Carla仿真地图与车辆轨迹与一身的数据集。CitySim数据集提供航拍地点的高精度3D仿真地图以支持数字孪生相关研究。地图基于GIS信息制作,支持Carla、Sumo和Unity等平台的仿真。此外,数据集还提供与轨迹对应的信号灯配时数据。
图1. 数据集功能演示
图2. 轨迹提取演示。数据集对每辆车提供精确的7个关键点,每个关键点都经过人工修复校正
图3. PET<2.5可视化演示
图4. 速度可视化演示

图5. CitySim与多个知名开源轨迹数据集的横向对比

图6. 数据集已有地点(持续更新中)
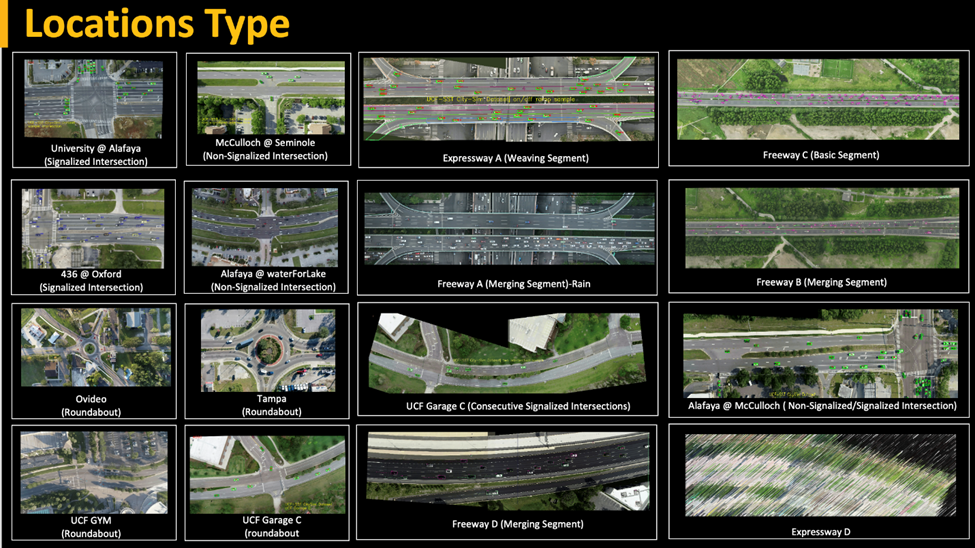
图7. 数据集已有地点目前已公开前五个地点(持续更新中)
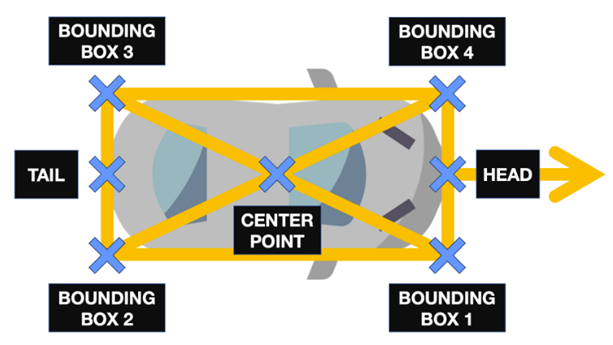
图8. 7个车辆关键点,包括车辆中心点、四个角以及车头车尾中心点
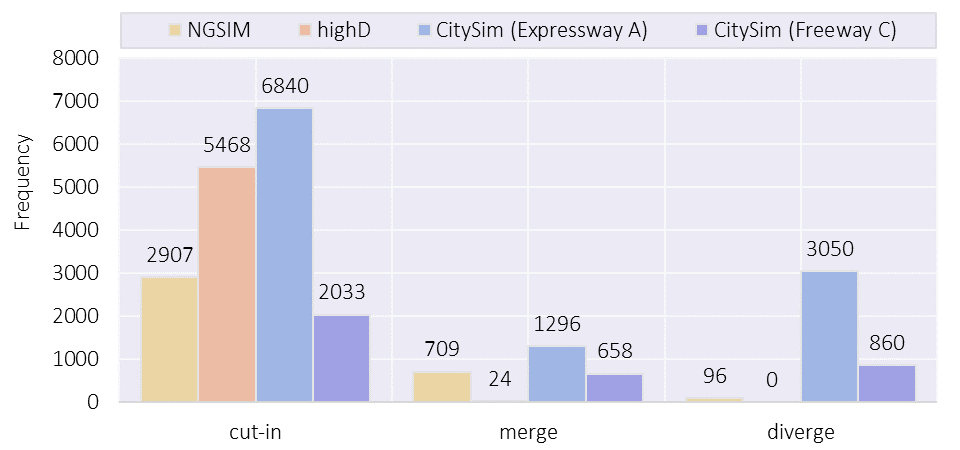
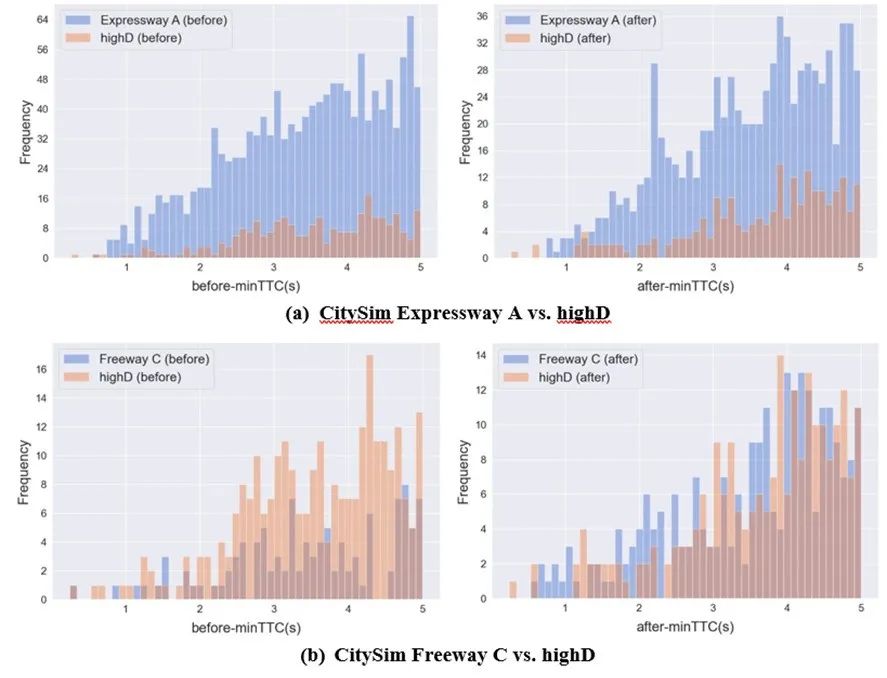
图9. CitySim与highD、NGSim事件数的横向对比。以CitySim的ExpresswayA和FreewayC地点为例,cut-in,merge、diverge和TTC<5的冲突事件数显著高于highD和NGSim
✦
✦
提供仿真底图,支持数字孪生
为了促进基于数字孪生的应用,CitySim 数据集为每个航拍地点提供了仿真底图。3D地图模型基于 GIS 数据(卫星图像、高程和点云数据)、道路矢量数据(OpenStreetMap)和谷歌街景图构建。仿真地图使用专业道路设计软件RoadRunner制作,参照卫星图像、点云和道路矢量数据构建道路网;每条车道的标线和形状都以 GIS 数据为基准绘制。场景中建筑物、路边标志和植物都是由专业建模人员使用谷歌街景和点云数据作为参考建造的。地图可导入Carla、Unity和Sumo用于仿真研究。
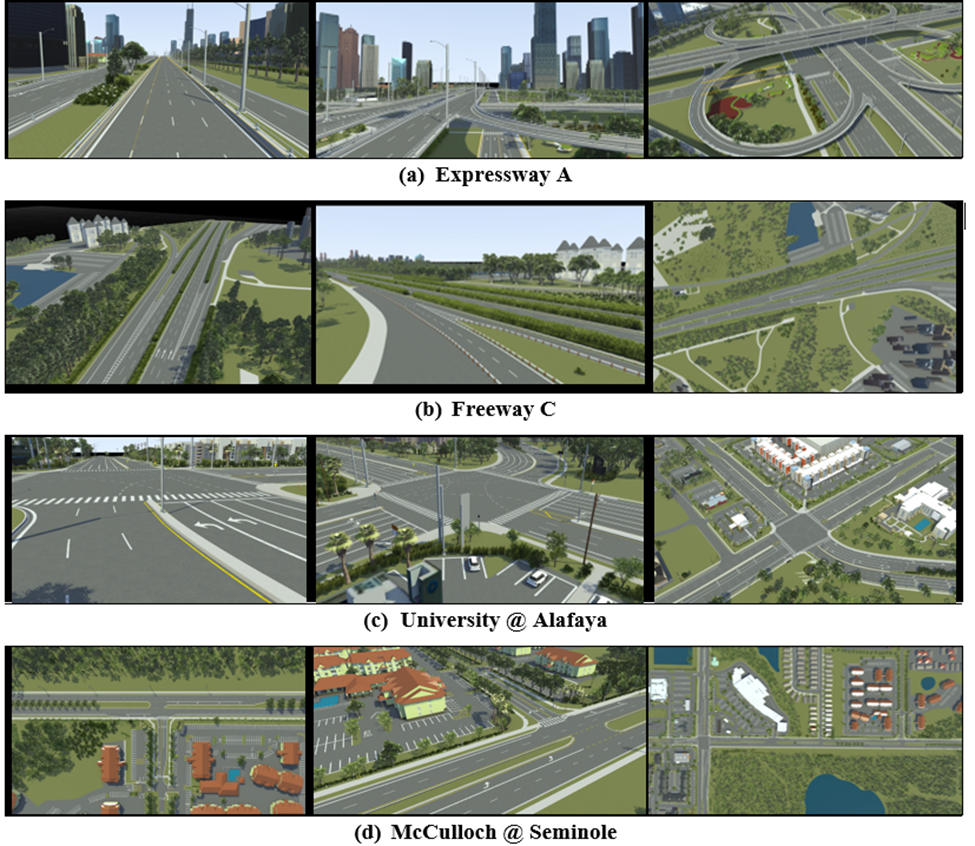
图10. 部分航拍地点3D地图

应用
CitySim是当下最全面的开源航拍车辆轨迹数据集,基于此数据集可以开展包括数字孪生、驾驶行为建模、驾驶模拟、冲突分析、自动驾驶仿真、轨迹预测、主动交通安全等众多研究和应用。
图11. Sumo-Carla 联合仿真演示

图12. Carla数字孪生自动驾驶测试

图13. VR驾驶模拟器
图14. 自动驾驶传感器仿真
图15. 行人-车辆在环数字孪生
自CitySim数据集发布不足一年以来,已经收到超过来自全球的70+科研机构、500+研究人员的申请,Github主页获赞超过210次。

欢迎各位同仁申请使用CitySim
数据集!
完整数据集申请需发送邮件至citysim.ucfsst@gmail.com,申请表和sample数据可在数据集Github主页下载。
数据集主页
https://github.com/ozheng1993/UCF-SST-CitySim-Dataset
论文引用
https://arxiv.org/abs/2208.11036
TRAFFIC ZONE
往期作品集
就业 秋招经验 求职招聘
数据集 深造求学 期刊会议
课题组介绍 交通出路 交通政策
交通知识 书籍推荐

这篇关于数据集 | CitySim: 最大、最全、最丰富的无人机航拍车辆轨迹数字孪生开源数据集...的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




