维空间专题

比较3维空间中4个点的不同结构
在4*4*4的3维空间中,取4个点共有635376种可能,有209个结构,继续按旋转对称分类则只有55个不同的结构。如其中的4t12 4个点在同一个平面,有1个点与其中的3个点不在同一行也不在同一列,这样的位置不止一个 这两个结构都是4t12。 这里所有的4点结构都是用3点结构一点一点相加得到,因为最先构造出的是A,因此4t12按最易构造原则取A作为稳定态。所有其他结构用同样方法筛选

低维数据通过核函数映射到高维空间(Gaussian Radial Basis Function)
参考 下面是一段matlab代码,可以实现利用Gaussian Radial Basis Function将低维数据映射到高维空间,以二维数据为例: 生成一个2D平面 figure;axis([-10 10 -10 10])hold ongrid on; 利用鼠标在该2D平面上取两组点 初始化 red = []; %存放第一组点,红色点
本人开发的3维空间数据可视化工具包:Matplot3D for JAVA 欢迎使用
资源下载(gitee): https://gitee.com/tanling8334/Matplot3D-for-Java Matplot3D for JAVA是一个基于JAVA SE 1.5环境开发的工具包。以jar包的方式存在。它提供易于使用的API,可以方便的生成3维效果的各种图形图表。可用于数据的可视化和数学分析等领域。支持交互操作,使用鼠标在现实趋于拖动以及使用鼠标滚轮能实时改变
超维空间M1无人机使用说明书——61、ROS无人机物体识别与精准投放
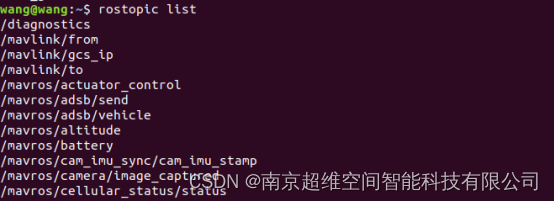
引言:基于空中物流的项目背景。我们提供了使用基于诗句的物体识别和精准投放、降落。实现原理如下: 1、在ROS下使用机载电脑实现物体识别 2、记载电脑根据反馈的位置发布运动控制指令 3、PX4解析机载电脑发布的命令,作出运动控制 4、设置阈值,满足后,ROS发布投放指令 一、视频演示: 视频链接 二、源代码下载链接 源码链接 三、使用说明 1、启动二维码识别与降落程序 rosl

直线拟合(支持任意维空间的直线拟合,附代码)
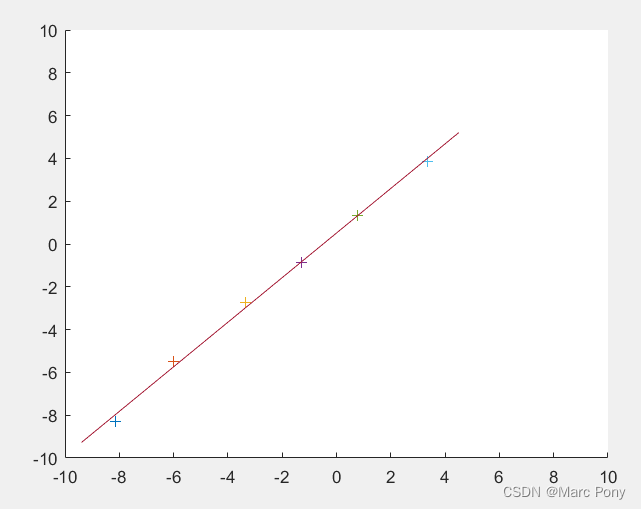
文章目录 一、问题描述二、推导步骤三、 M A T L A B MATLAB MATLAB代码 一、问题描述 给定一系列的三维空间点 ( x i , y i , z i ) , i = 1 , 2 , . . . , n (x_i,y_i,z_i),i=1,2,...,n (xi,yi,zi),i=1,2,...,n,拟合得到直线的方程。本文的直线拟合方法适用于任意维空

7.人工智能原理-高维空间:机器如何面对越来越复杂的问题
目录 一、高维度 二、线性不可分 三、TensorFlow游乐场 四、向量、矩阵、张量 五、编程实验 六、总结 七、往期内容 一、高维度 如果我们想要去判断一个人是否善于打篮球,很明显,仅仅考虑他的身高特征是不合理的。虽然这个特征很关键,但还需要从其他的角度去分析,比如体重、身体灵活性以及是否经常见到凌晨四点钟的太阳等等因素。 高维:同样,在之前的课程中,
超维空间S2无人机使用说明书——61、ROS无人机4G远程控制
4G模块使用说明 引言:为了实现对无人机的远程控制,我们采用了4G通信的方案,该方案需要硬件以及相关软件的支持。4G通信是可选择功能,请确认无人机型号是否选配了4G通信。 一、4G通信方案 我们的4G通信主要通过两种方式实现,一种是使用终端模拟器,比如Xshell、putty,另一种是使用远程软件,如nomachine。具体使用教程如下:机载电脑的相关环境已经配置完成,直接使用即可。 二、

如果4维空间可以被3维空间分割的话,.... ....
虎氏维分割猜想 1. 1 维空间被 0 维空间分割(点分割直线) 当不重复的 0 维空间个数为 0,1,2,3,4 时,1维空间最多可分割为 1,2,3,4,5个 2. 2 维空间被 1 维空间分割(直线分割面) 当不重复的 1 维空间个数为 0,1,2,3,4 时,2维空间最多可分割为 1,2,4,7,11个 3. 3 维空间被 2 维空间分割(面分割三维
超维空间M1无人机使用说明书——01、ROS机载电脑使用说明——远程连接
引言:远程连接通常采用两种方式,一种是通过可视化软件,如VNC、Nomachine等,另外一种是使用SSH。各有优缺点,两种远程登录方式的优缺点做一个简单的对比: 1、SSH优缺点 优点:1、消耗网络资源 2、运行稳定 缺点:1、图形化界面卡顿 2、对新手不友好 2、可视化软件优缺点 优点:1、对新手友好 2、运图形化界面比ssh流畅 缺点:1、消耗网络资源 基于以上考虑,我们默认都
超维空间M1无人机使用说明书——01、ROS机载电脑使用说明——远程连接
引言:远程连接通常采用两种方式,一种是通过可视化软件,如VNC、Nomachine等,另外一种是使用SSH。各有优缺点,两种远程登录方式的优缺点做一个简单的对比: 1、SSH优缺点 优点:1、消耗网络资源 2、运行稳定 缺点:1、图形化界面卡顿 2、对新手不友好 2、可视化软件优缺点 优点:1、对新手友好 2、运图形化界面比ssh流畅 缺点:1、消耗网络资源 基于以上考虑,我们默认都
超维空间M1无人机使用说明书——61、ROS无人机yolo识别与投放
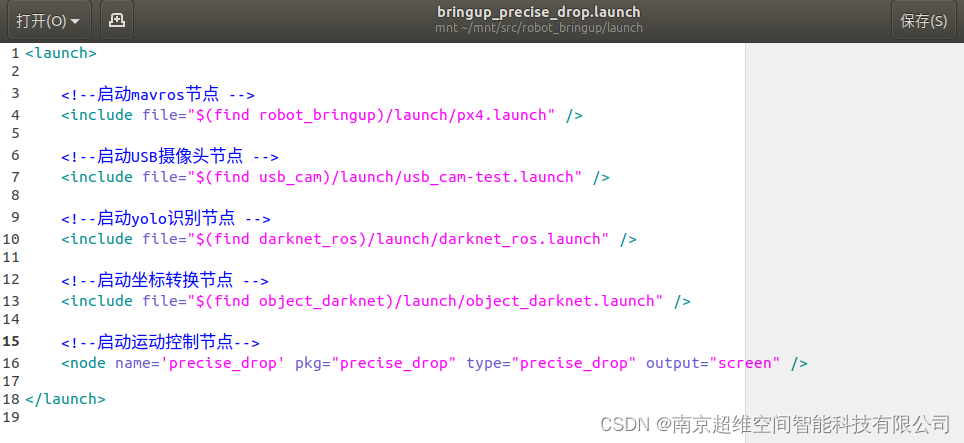
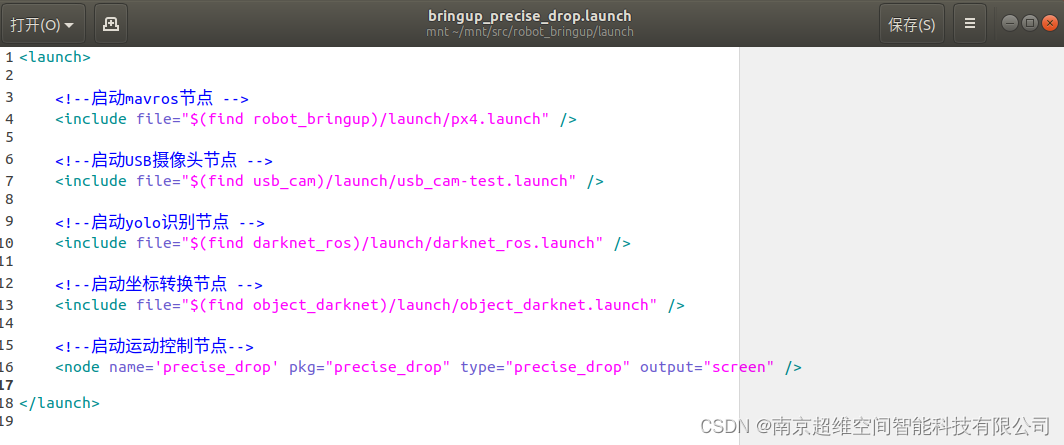
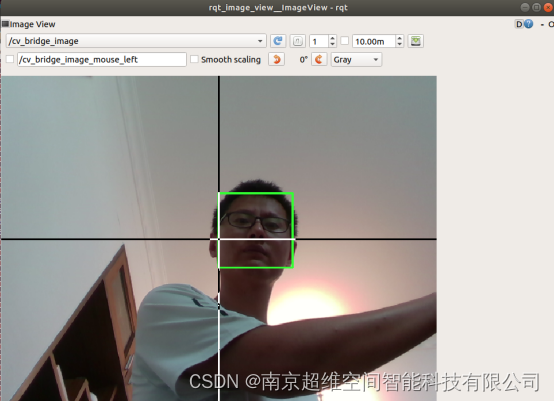
引言:使用yolo进行物体识别,根据返回的目标位置信息,控制无人机全向移动,当无人机到达目标物的正上方,满足一定的误差阈值后,ROS发布控制控制将舵机挂载的物体抛下,紧接着无人机前往起飞点上方寻找降落的目标点降落。 一、一键启动识别与投放程序 roslaunch robot_bringup bringup_precise_drop.launch 未出现红色报错,表明程序运行正常 l

超维空间M1无人机使用说明书——31、基于模板匹配的物体识别功能
引言:ROS提供的物体识别功能包find_object_2d,该功能包用起来相对简单,只需要简单进行模板匹配即可。需要接显示器进行模板训练,远程比较卡,不建议 一、功能包find_object_2d简介 ROS的优点之一是有大量可以在应用程序中复用的软件包。在我们的例程中,想要实现对一个物体的识别和检测。而find_object_2d包就是一个物体识别和检测的ROS功能包,它实现了SURF、S
超维空间M1无人机使用说明书——21、基于opencv的人脸识别
引言:M1型号无人机不仅提供了yolo进行物体识别,也增加了基于opencv的人脸识别功能包,仅需要启动摄像头和识别节点即可 一、一键启动摄像头和人脸识别节点 roslaunch robot_bringup bringup_face_detect.launch 无报错,出现以下界面表示启动成功。 launch文件详解 二、查看摄像头的图像 为了节约资源,默认关闭了图像显示框,
超维空间S2无人机使用说明书——52、初级版——使用PID算法进行基于yolo的目标跟踪
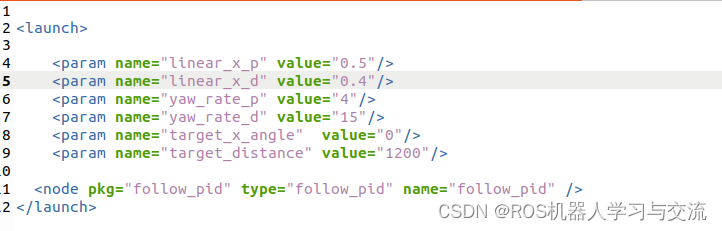
引言:在实际工程项目中,为了提高系统的响应速度和稳定性,往往需要采用一定的控制算法进行目标跟踪。这里抛砖引玉,仅采用简单的PID算法进行目标的跟随控制,目标的识别依然采用yolo。对系统要求更高的,可以对算法进行改进,也欢迎读者与我们联系,合作开发。 步骤一:打开摄像头 注意:为了获取目标物的三维位置信息,我们采用了D435深度摄像头,仅供参考,可根据需要自行选择即可 roslaunch r
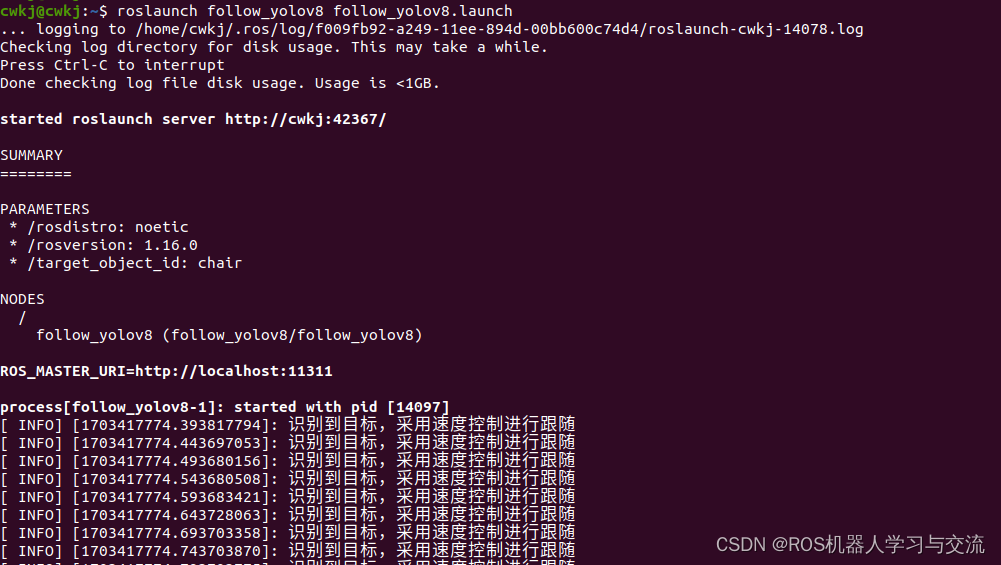
超维空间S2无人机使用说明书——51、基础版——使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,以及yolov7。 简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。 硬件:D435摄像头,Jetson orin nano 8G 环境:ubuntu20.
超维空间S2无人机使用说明书——51、使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,以及yolov7。 简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。 硬件:D435摄像头,Jetson orin nano 8G 环境:ubuntu20.
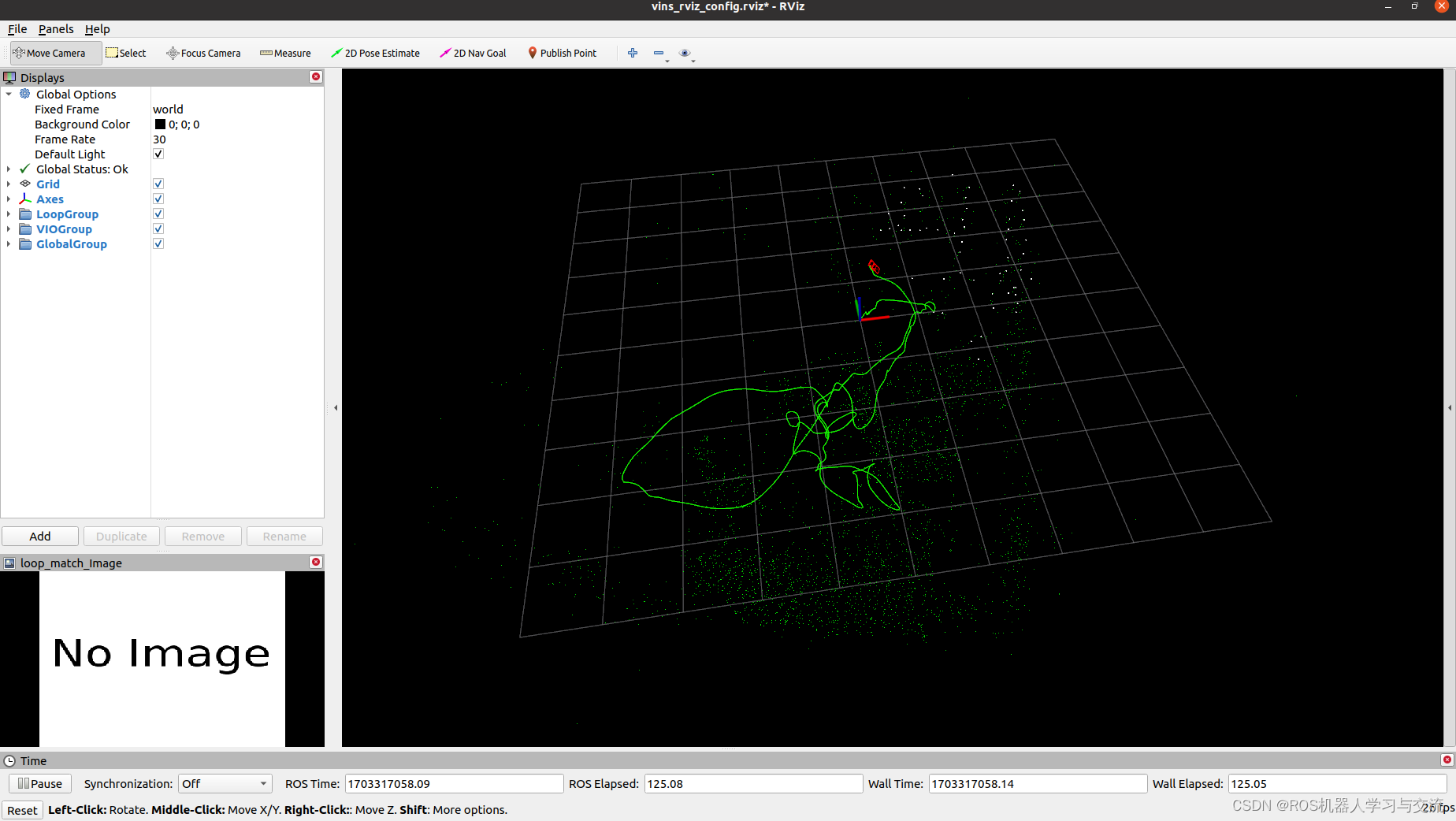
超维空间S2无人机使用说明书——21、VINS视觉定位仿真
引言:为了实现室内无人机的定位功能,S系列无人机配置了VINS-FUSION定位环境,主要包含了仿真跑数据集和实际操作部分。为了提前熟悉使用原理,可以先使用仿真环境跑数据集进行学习和理解 硬件:1080P显示器、Jetson orin nano 8g 软件环境:ubuntu20.04+ros-noetic 步骤一:启动VINS和RVIZ roslaunch vins vins_rviz.l

超维空间S2无人机使用说明书——42、使用3维雷达进行室内定位——实物篇
引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。 简介 定位采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度等信息。该算法主要依赖CPU的运算速度,因此需要选择合适的主控进行开发即可。 硬件:宇树雷达4DLiDAR L1 PM,ROS主控Jets
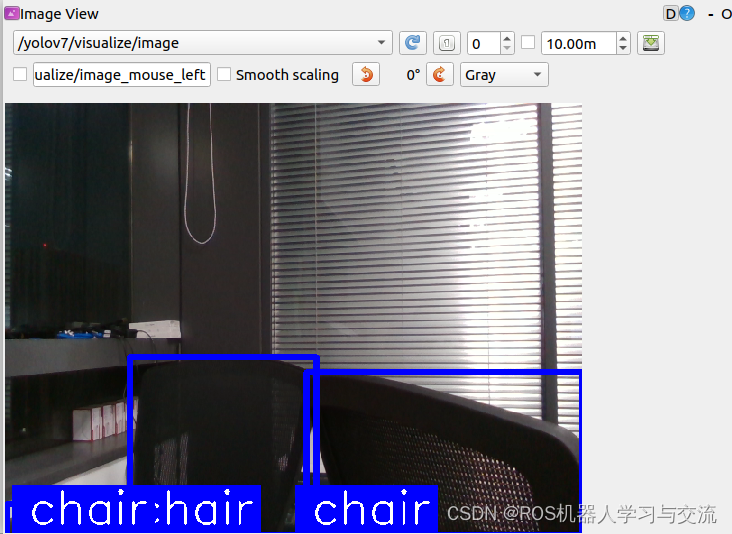
超维空间S2无人机使用说明书——32、使用yolov7进行目标识别
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov7进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,也有更高版本的yolov8。 简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。 硬件:D435摄像头,Jetson orin nano 8G 环境:ubun
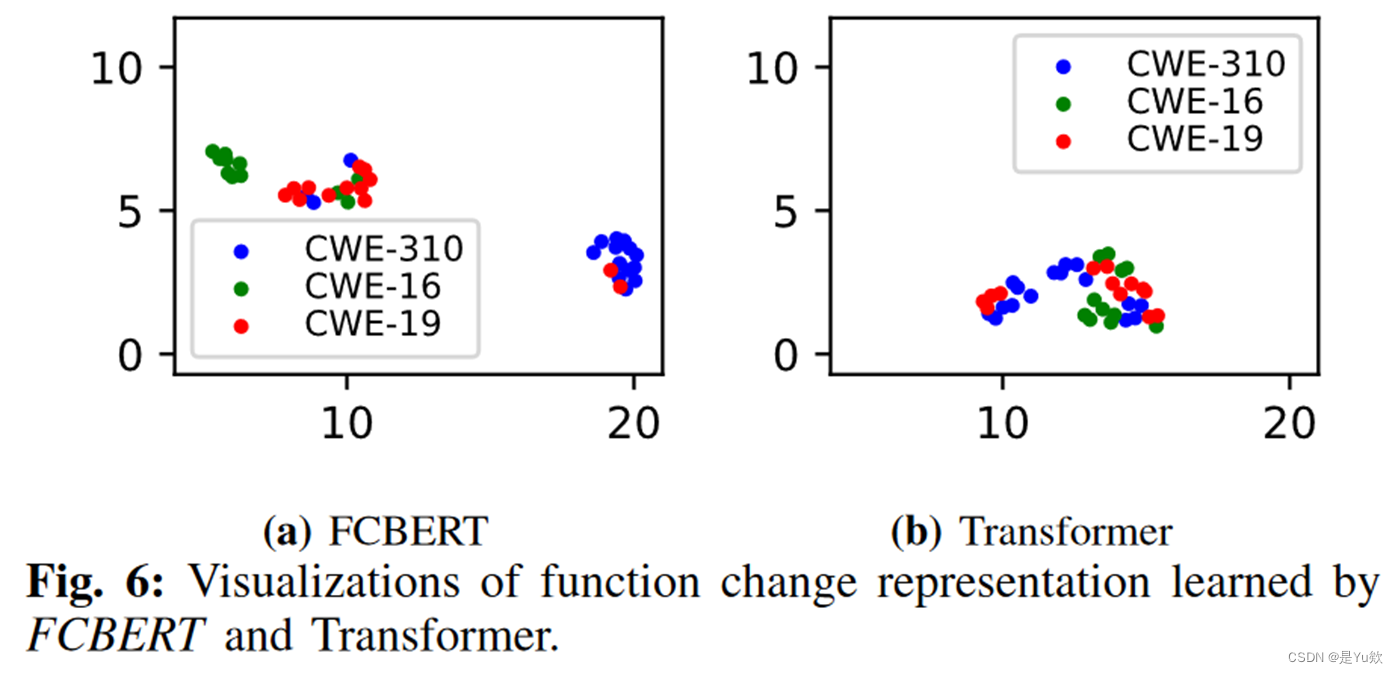
【网安AIGC专题10.25】8 CoLeFunDa华为团队:静默漏洞检测(识别+多分类)+数据增强、样本扩充+对比学习+微调+结果分析(降维空间,分类错误样本归纳,应用场景优势,有效性威胁分析)
CoLeFunDa:Explainable Silent Vulnerability Fix Identification 写在最前面论文主要贡献启发论文主要工作对论文工作的一些启发 摘要目标问题: 静默依赖修复问题现有工作本文工作主要贡献 Proposed approach提出的方法PPT中"Proposed approach" 和 "Methodology" 的区别背景知识知识迁移微调

C++出黑科技了!程序员大牛开发基于OpenGL的模拟3维空间模型
新一代三维GIS技术体系,以二三维一体化技术为基础框架,进一步拓展二三维一体化数据模型,融合倾斜摄影、BIM、激光点云等多源异构数据,推动三维GIS实现室外室内一体化、宏观微观一体化、空天/地表/地下一体化,赋能全空间的三维GIS应用。 这是一款用OpenGL模拟的一个3维空间模型,用VC++源码实现,一个模拟的3维视图,随着鼠标移动会改变视图,VC++6下可直接编译代码,仅此参考。