本文主要是介绍超维空间S2无人机使用说明书——21、VINS视觉定位仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
引言:为了实现室内无人机的定位功能,S系列无人机配置了VINS-FUSION定位环境,主要包含了仿真跑数据集和实际操作部分。为了提前熟悉使用原理,可以先使用仿真环境跑数据集进行学习和理解
硬件:1080P显示器、Jetson orin nano 8g
软件环境:ubuntu20.04+ros-noetic
步骤一:启动VINS和RVIZ
roslaunch vins vins_rviz.launch

等待RVIZ打开,并且出现如下界面,表明关于VINS参数配置的RVIZ启动成功

步骤二:启动VINS节点
注意,这里加载的参数文件一定要准确,可以仔细比对
rosrun vins vins_node '/home/cwkj/cwkj_ws/src/VINS-Fusion-gpu/config/euroc/euroc_stereo_imu_config_old.yaml'

步骤三:回放数据集
rosbag play V1_01_easy.bag

查看之前打开的VINS节点,查看终端打印日志
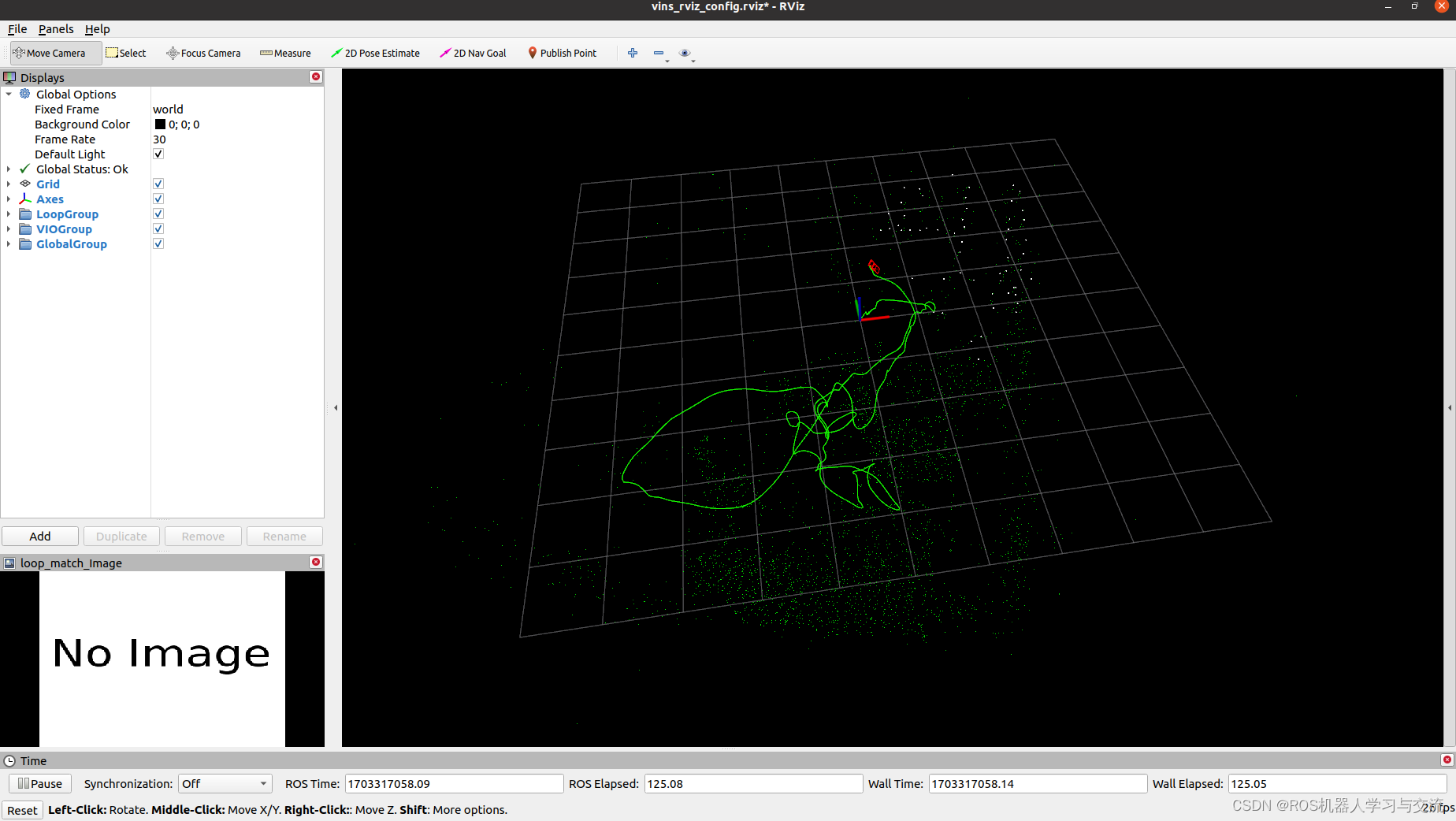
查看RVIZ可视化界面,可以看到VINS数据集跑出来的定位效果图
这篇关于超维空间S2无人机使用说明书——21、VINS视觉定位仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





