本文主要是介绍超维空间S2无人机使用说明书——51、使用yolov8进行目标跟踪,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。
硬件:D435摄像头,Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic, yolov8
注:目标跟随是在木根识别的基础上进行,因此本小节和yolov8识别小节类似,只是在此基础上添加了跟随控制程序
步骤一: 启动摄像头,获取摄像头发布的图像话题
roslaunch realsense2_camera rs_camera.launch
没有出现红色报错,出现如下界面,表明摄像头启动成功
步骤二:启动yolov8识别节点
roslaunch yolov8_ros yolo_v8.launch
launch文件如下,参数use_cpu设置为false,因为实际使用GPU加速,不是CPU跑,另外参数pub_topic是yolov8识别到目标后发布出来的物体在镜头中的位置,程序作了修改,直接给出目标物的中心位置,其中参数image_topic是订阅的节点话题,一定要与摄像头发布的实际话题名称对应上。
<?xml version="1.0" encoding="utf-8"?>
<launch><!-- Load Parameter --><param name="use_cpu" value="false" /><!-- Start yolov8 and ros wrapper --><node pkg="yolov8_ros" type="yolo_v8.py" name="yolov8_ros" output="screen" ><param name="weight_path" value="$(find yolov8_ros)/weights/yolov8n.pt"/><param name="image_topic" value="/camera/color/image_raw" /><param name="pub_topic" value="/object_position" /><param name="camera_frame" value="camera_color_frame"/><param name="visualize" value="false"/><param name="conf" value="0.3" /></node>
</launch>
出现如下界面表示yolov8启动成功

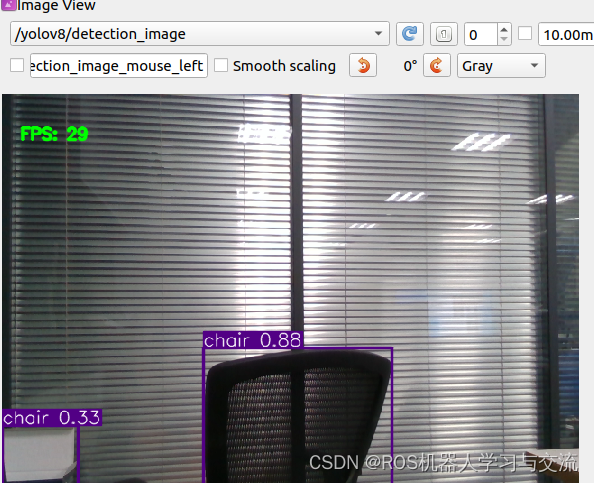
步骤三:打开rqt工具,查看识别效果
注:步骤三不是必须的,可以跳过直接进行步骤四
rqt_image_view

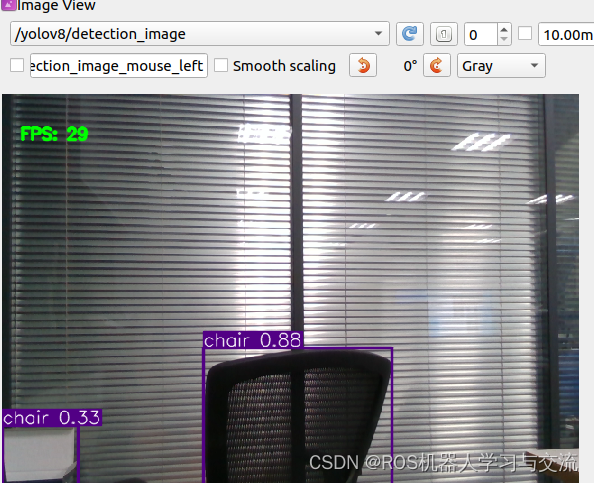
等待出现如下界面后,选择yolov8/detection_image查看yolov8识别效果
步骤四:启动跟随控制程序
(1)、终端启动程序
roslaunch follow_yolov8 follow_yolov8.launch
(2)、launch文件详解
<?xml version="1.0" encoding="utf-8"?>
<launch><param name="target_object_id" value="chair" /><node pkg="follow_yolov8" type="follow_yolov8" name="follow_yolov8" output="screen" />
</launch>
launch文件中加载的参数target_object_id是指定跟随的目标名称,无人机在识别到这个目标以后,会通过全向的速度控制保持目标始终在无人机的视野中。launch文件中指定参数chair,因此在识别chair以后,可以看到终端会打印日志已经识别到指定的目标物
步骤五:控制部分代码
此处抛砖引玉,仅仅做最简单的速度控制,读者可以根据自己的理解,添加类似PID等控制跟随的算法,本文不再展开
#include <ros/ros.h>
#include <std_msgs/Bool.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/TwistStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <mavros_msgs/PositionTarget.h>
#include <cmath>
#include <tf/transform_listener.h>
#include <nav_msgs/Odometry.h>
#include <mavros_msgs/CommandLong.h>
#include <yolov8_ros_msgs/BoundingBoxes.h>
#include <string>#define MAX_ERROR 50
#define VEL_SET 0.15
#define ALTITUDE 0.40using namespace std;yolov8_ros_msgs::BoundingBoxes object_pos;
nav_msgs::Odometry local_pos;
mavros_msgs::State current_state;
mavros_msgs::PositionTarget setpoint_raw;//检测到的物体坐标值
double position_detec_x = 0;
double position_detec_y = 0;
std::string Class = "no_object";std::string target_object_id = "eight";void state_cb(const mavros_msgs::State::ConstPtr& msg);void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg);void object_pos_cb(const yolov8_ros_msgs::BoundingBoxes::ConstPtr& msg);int main(int argc, char **argv)
{//防止中文输出乱码setlocale(LC_ALL, "");//初始化节点,名称为visual_throwros::init(argc, argv, "follow_yolov8");//创建句柄ros::NodeHandle nh;//订阅无人机状态话题ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>("mavros/state", 100, state_cb);//订阅无人机实时位置信息ros::Subscriber local_pos_sub = nh.subscribe<nav_msgs::Odometry>("/mavros/local_position/odom", 100, local_pos_cb);//订阅实时位置信息ros::Subscriber object_pos_sub = nh.subscribe<yolov8_ros_msgs::BoundingBoxes>("object_position", 100, object_pos_cb);//发布无人机位置控制话题ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>("mavros/setpoint_position/local", 100);//发布无人机多维控制话题ros::Publisher mavros_setpoint_pos_pub = nh.advertise<mavros_msgs::PositionTarget>("/mavros/setpoint_raw/local", 100); //请求无人机解锁服务 ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>("mavros/cmd/arming");//请求无人机设置飞行模式,本代码请求进入offboardros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("mavros/set_mode");//请求控制舵机客户端ros::ServiceClient ctrl_pwm_client = nh.serviceClient<mavros_msgs::CommandLong>("mavros/cmd/command");//循环频率ros::Rate rate(20.0); ros::param::get("target_object_id", target_object_id);//等待连接到PX4无人机while(ros::ok() && current_state.connected){ros::spinOnce();rate.sleep();}setpoint_raw.type_mask = 1 + 2 + /*4 + 8 + 16 + 32*/ + 64 + 128 + 256 + 512 + 1024 + 2048;setpoint_raw.coordinate_frame = 8;setpoint_raw.position.x = 0;setpoint_raw.position.y = 0;setpoint_raw.position.z = 0 + ALTITUDE;mavros_setpoint_pos_pub.publish(setpoint_raw);for(int i = 100; ros::ok() && i > 0; --i){mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();}//请求offboard模式变量mavros_msgs::SetMode offb_set_mode;offb_set_mode.request.custom_mode = "OFFBOARD";//请求解锁变量mavros_msgs::CommandBool arm_cmd;arm_cmd.request.value = true;ros::Time last_request = ros::Time::now();//请求进入offboard模式并且解锁无人机,15秒后退出,防止重复请求 while(ros::ok()){//请求进入OFFBOARD模式if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0))){if( set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent){ROS_INFO("Offboard enabled");}last_request = ros::Time::now();}else {//请求解锁if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0))){if( arming_client.call(arm_cmd) && arm_cmd.response.success){ROS_INFO("Vehicle armed");}last_request = ros::Time::now();}}if(ros::Time::now() - last_request > ros::Duration(5.0))break;mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();} while(ros::ok()){ //此处表示识别到launch文件中指定的目标//if(object_pos.bounding_boxes[0].Class == "chair")if(Class == target_object_id){ROS_INFO("识别到目标,采用速度控制进行跟随");//摄像头向下安装,因此摄像头的Z对应无人机的X前后方向,Y对应Y左右方向//无人机左右移动速度控制if(position_detec_x-320 >= MAX_ERROR){setpoint_raw.velocity.y = -VEL_SET;} else if(position_detec_x-320 <= -MAX_ERROR){setpoint_raw.velocity.y = VEL_SET;} else{setpoint_raw.velocity.y = 0;}//无人机前后移动速度控制if(position_detec_y-240 >= MAX_ERROR){setpoint_raw.velocity.x = -VEL_SET;} else if(position_detec_y-240 <= -MAX_ERROR){setpoint_raw.velocity.x = VEL_SET;} else{setpoint_raw.velocity.x = 0;}}else{setpoint_raw.velocity.x = 0;setpoint_raw.velocity.y = 0;}setpoint_raw.type_mask = 1 + 2 +/* 4 + 8 + 16 + 32*/ + 64 + 128 + 256 + 512 /*+ 1024 + 2048*/;setpoint_raw.coordinate_frame = 8;setpoint_raw.velocity.x = 0;setpoint_raw.position.z = 0 + ALTITUDE;setpoint_raw.yaw = 0;mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();}return 0;
}void state_cb(const mavros_msgs::State::ConstPtr& msg)
{current_state = *msg;
}void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg)
{local_pos = *msg;
}void object_pos_cb(const yolov8_ros_msgs::BoundingBoxes::ConstPtr& msg)
{object_pos = *msg;position_detec_x = object_pos.bounding_boxes[0].xmin;position_detec_y = object_pos.bounding_boxes[0].ymin;Class = object_pos.bounding_boxes[0].Class;
}从图中可以看出,在10W功率的情况下,大概在30帧的效果,识别准确度比较高
这篇关于超维空间S2无人机使用说明书——51、使用yolov8进行目标跟踪的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





