本文主要是介绍超维空间S2无人机使用说明书——61、ROS无人机4G远程控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
4G模块使用说明
引言:为了实现对无人机的远程控制,我们采用了4G通信的方案,该方案需要硬件以及相关软件的支持。4G通信是可选择功能,请确认无人机型号是否选配了4G通信。
一、4G通信方案
我们的4G通信主要通过两种方式实现,一种是使用终端模拟器,比如Xshell、putty,另一种是使用远程软件,如nomachine。具体使用教程如下:机载电脑的相关环境已经配置完成,直接使用即可。
二、检查指示灯是否正常
出现两个蓝色灯,一个慢闪,表明当前网络状况正常,可以直接使用

三、方案一、使用终端模拟软件进行远程连接
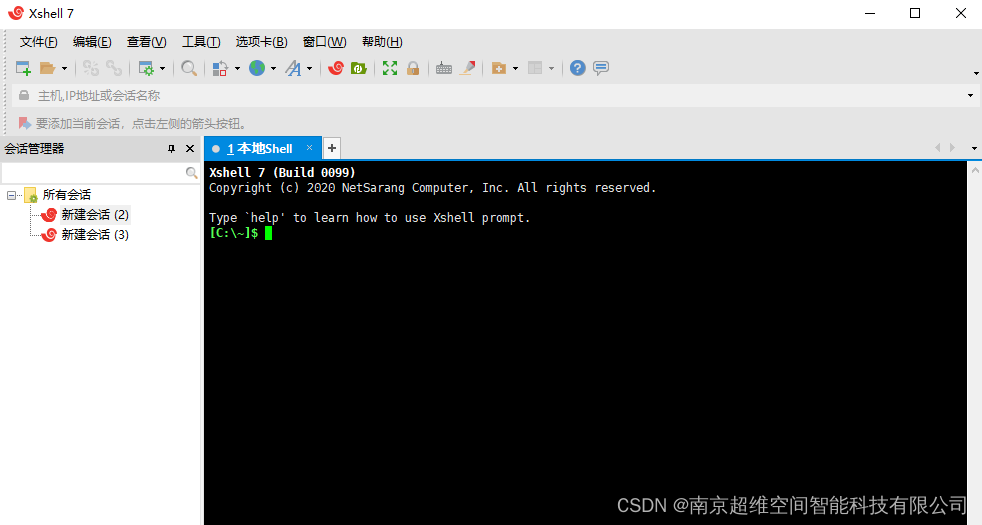
1、打开Xshell软件,填写对应的IP地址和端口号(putty软件同理使用)

2、打开后如下:
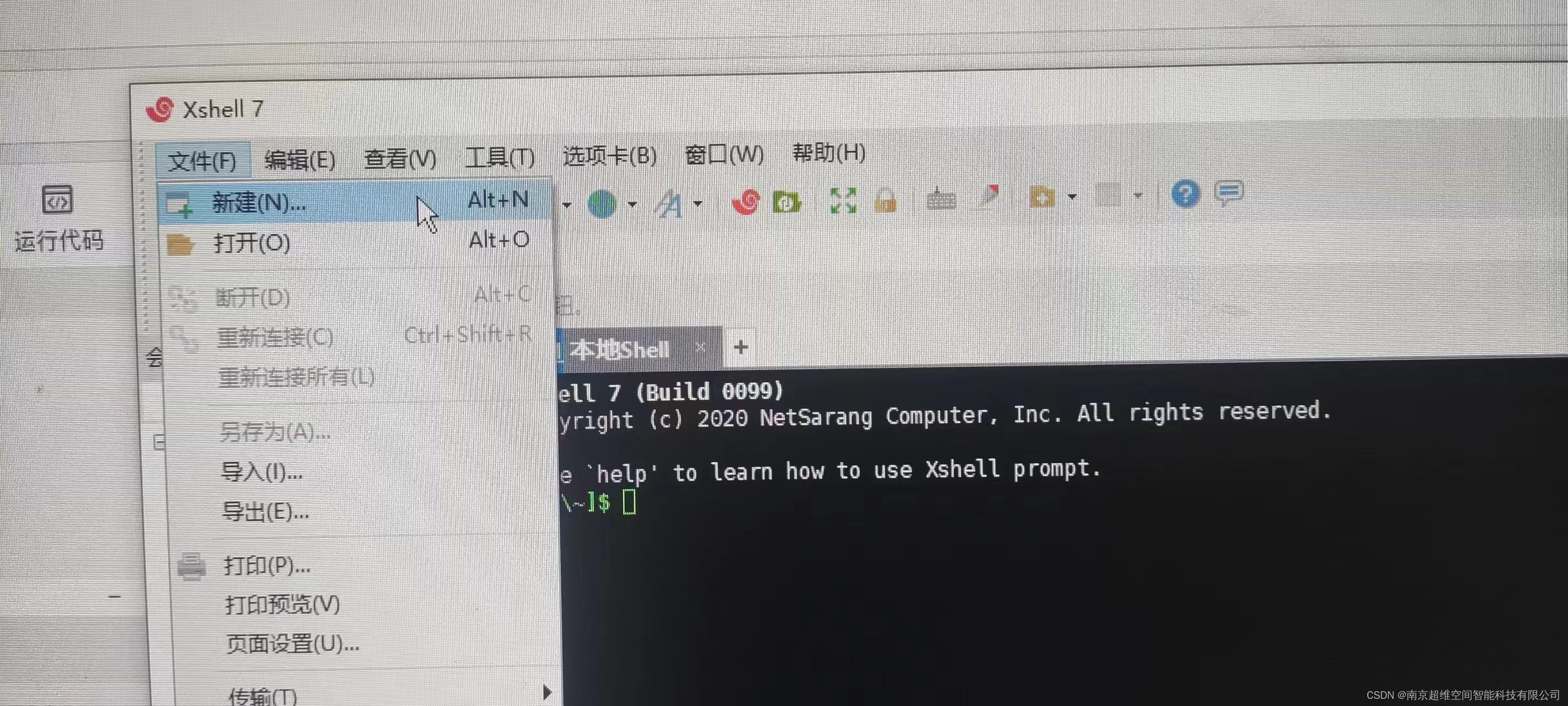
3、选择新建会话
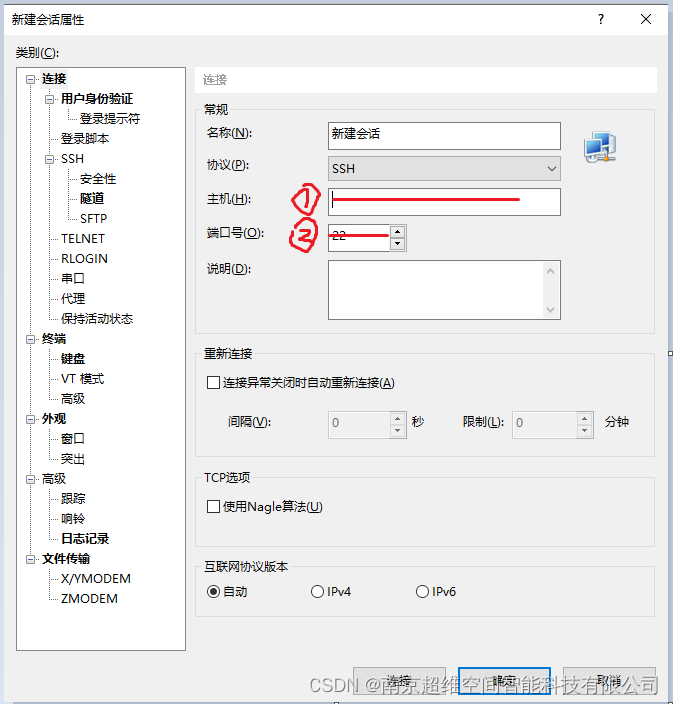
4、填写对应的IP和端口号
IP和端口号问客服索要,私密账号,此处不添加演示
5、按照提示输入机载电脑用户名和密码即可
用户名:cwkj
密码:111
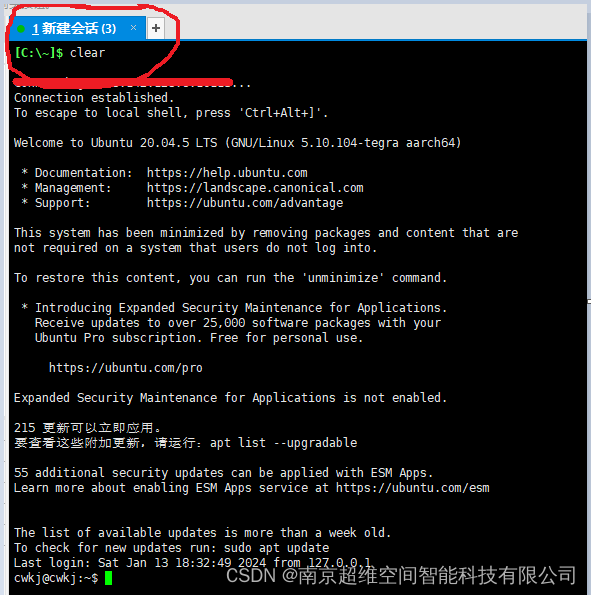
6、判断是否连接上
(1)、未连接远程,左上角红色或者灰色
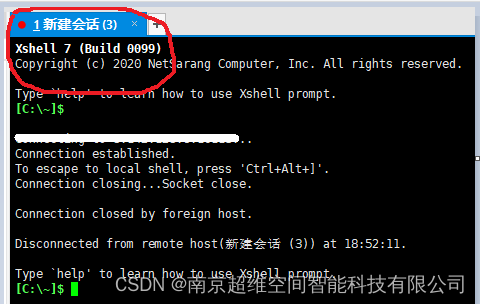
(2)、已经连接远程,左上角显示绿色
四、方案二、使用可视化远程软件进行远程连接
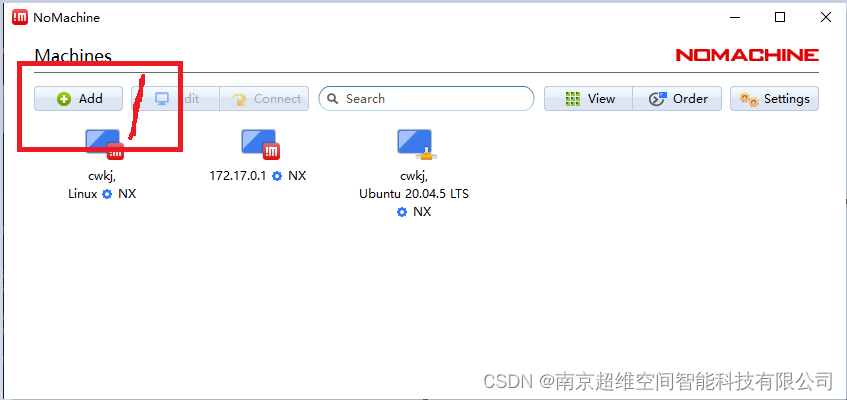
1、打开nomachine软件(其他软件同理使用)

2、打开后点击左上角add添加ip和端口号
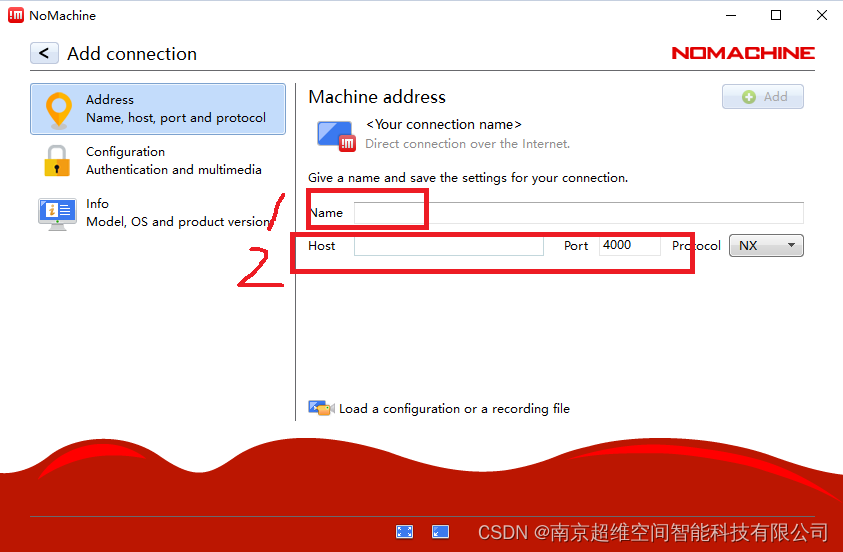
3、在下图红框分别写用户名和IP以及对应的端口号,然后Enter确认
4、回到主界面,然后Enter确认即可看到机载电脑端的左面了
这篇关于超维空间S2无人机使用说明书——61、ROS无人机4G远程控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





