波束专题

【基于FPGA的B超数字波束形成技术案例程序】
基于FPGA的B超(超声波成像)数字波束形成技术是一个复杂的系统,它涉及到信号的采集、预处理、波束合成、图像重建等多个步骤。在这里,我将提供一个简化的案例程序框架,以帮助你理解如何在FPGA上实现数字波束形成的基本思想。 系统概述 在B超系统中,数字波束形成通常涉及从多个换能器(探头)接收到的回波信号中进行时间延迟和幅度加权,以聚焦和增强来自特定方向(即扫描点)的反射信号。这些处理步骤在FPG
毫米波移动通信系统中的波束赋形
在毫米波移动通信系统中,系统的频点较高,因此毫米波系统的射频器件易于小型化,然而同时也带来绕射能力差、穿透损耗大、路径损耗大[4][5]等缺点,这将大大降低了毫米波通信系统的接收功率,其中阻挡效应被认为是制约毫米波应用于移动通信系统的关键因素之一。为了对抗毫米波移动通信系统的噪声受限问题,目前普遍认为在毫米波移动通信系统中将会在发射端和接收端上同时使用天线阵列进行发送和接收[4][5],因此必须要
【文献阅读】一种多波束阵列重构导航抗干扰算法
引言 针对导航信号在近地表的信号十分微弱、抗干扰能力差的问题,文章提出了自适应波束形成技术。 自适应波束形成技术可以分为调零抗干扰算法和多波束抗干扰算法。 调零抗干扰算法主要应用功率倒置技术,充分利用导航信号功率低于环境噪声功率的特点,对强信号来向角度进行抑制。 多波束抗干扰算法原理是通过对采样信号实时计算,由信号统计特征获得一组合适阵列配置参数,依此调整主波束指向期望信号方向,同时在空域上对干

关于多波束国产化的问题
最近看了陈经教授关于中国经济和工业化的问题的思考, 他的意思是说工业化、国产化是实现共同富裕的最根本的手段; 欧美国家富裕的生活是他们工业化后在我们身上取得高额利润 得来的。我对这个观点深表赞同。 就拿海洋测绘领域来说,绝大部分设备都是国外购买的,就拿 多波束来说,从EM1002,EM3002,EM2040D,EM122,我们买 了挪
多波束EM122安装纪实(一)总览
更多资讯见 xiaok海洋测绘网 1)底座和导流罩制造(见发射底座图,接收底座图、导流罩图) 导流罩图已经预留浅剖安装空间。 注意1:实物配钻与攻丝。 注意2:接收换能器底座有方向要求。 注意3:底座上的出缆孔位置,根据电缆穿舱位置而定。另开若干入水孔,现场定。 注意4:备好锌块丝孔。 注意5:其他设备的底座也需要按各自要求准备好。 注意6:制造底座过程中备好

Qimera处理多波束all数据记录
之前写过使用Qimera处理db格式的多波束数据,QPS Qimera处理Qinsy采集的db格式多波束数据,具体的步骤就不用说了。 前两天有个人问Qimera处理all数据的问题,Qimera加载不了潮位,我们一般使用CARIS处理all数据,很少用QPS Qimera处理。 刚好船上做了3条all数据的校准线,就用Qimera 1.6.3尝试了一下。潮位加载没有问题,使用的是ASCII格式

本周发布Qimera处理多波束第二课视频---滤波清理
Qimera处理多波束,特别是浅水数据时,手工清理异常数据,机械重复,而且工作量大,确实非常讨厌,因此,多波束软件提供了自动清理工具,即cube面滤波。 cube滤波设置 滤波结果: 滤掉的点

【复现】jake 3991/sonar-SLAM:用于多波束声纳机器人的水下SLAM
复现 jake 3991/sonar-SLAM:用于多波束声纳机器人的水下SLAM 前言一、sonar-SLAM 过程1.python环境2.ros环境3.安装4.数据5.在线运行报错1:No module named 'bruce_slam'报错2:No module named 'ros_numpy'报错3:No module named 'sklearn'报错4:AttributeEr
关于柔性阵列(/三维阵列)波束形成的仿真实践以及稳健波束形成的思考(1)
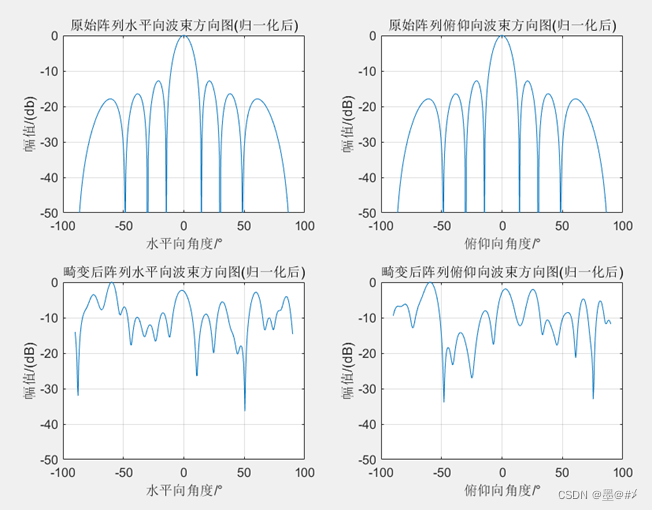
说明 关于波束形成,我之前写过几篇相关的博文,如参考资料[1]、[2]、[3]。除去在博文[2]中有讨论过阵元相对位置关系对波束形成的影响:“如何基于遗传算法优化阵元相对位置关系以压低旁瓣峰值”以外,似乎我认知里的天线阵列,在设计完成后其相对位置关系是不会发生变化的。事实上在绝大多数情况下确实是这样:比如车载雷达中我们的天线都是一个射频板上,它是一个刚体结构,当雷达制作好后,不存在 在使

天线波束扫描技术的研究
摘要 天线作为无线通信中重要的一部分,在不同的应用领域中对天线性能的需求也不尽相同。在遥感探测和卫星通信领域,天线的波束扫描特性受到广泛的关注。通常来说,天线的扫描技术分为机械扫描天线和电控扫描天线两类。传统的机械扫描天线体积大、扫描慢且稳定性差;电控扫描天线主要包括有源相控阵、可重构反射阵以及透射阵、液晶基波束扫描和漏波天线。本文主要介绍了几种电控波束扫描天线的研究进展,简要介绍
【MATLAB源码-第163期】基于matlab的BPSK+瑞利(rayleigh)信道下有无波束成形误码率对比仿真。
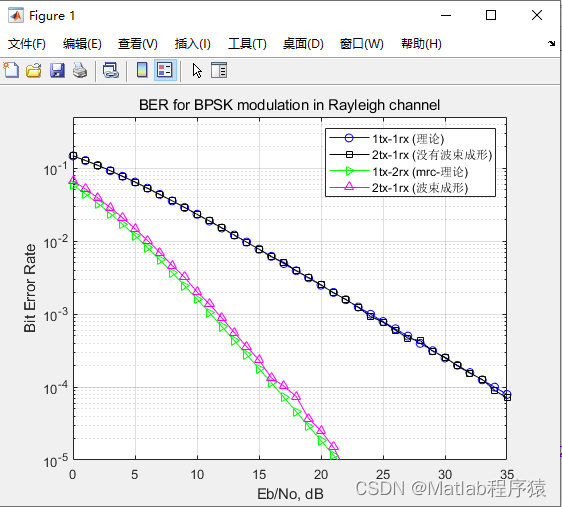
操作环境: MATLAB 2022a 1、算法描述 在通信系统中,波束成形(Beamforming)技术是一种广泛使用的信号处理技术,通过调整天线阵列中各个元素的相位和幅度,使得信号在特定方向上增强,在其他方向上减弱,从而提高信号的接收质量和系统的通信容量。瑞利信道(Rayleigh Channel)是一种典型的无线通信信道模型,用于描述在多径传播环境中,信号经过反射、散射和衍射等效应后,接


无线系列 - MIMO波束赋形技术研究
前言: 在MIMO系统中,波束赋形技术通过调整每个天线阵元上的信号进行加权求和,使天线波束指向某个特定的方向,即将天线能量集中指向某个特定的用户。 1.波束赋形分类 根据波束赋形发生位置的不同,波束赋形技术分为模拟波束赋形(Analog Beamforming, ABF)技术和数字波束赋形(Digital Beamforming, DBF)技术。 在数字基带之前即时域范围内形成波

无线系列 - 5G大规模MIMO阵列仿真及混合波束成形设计
前言: 5G 宽带速度的飞跃将通过毫米波 (mmWave) 频率范围内的大规模MIMO 通信以及更高效地利用频谱的新无线电算法实现。新的设计架构和算法将影响 5G 系统的各个方面:从天线到 RF 电子再到基带算法。这些子系统的性能耦合地如此紧密,以致于必须进行联合设计和评估。 1. 用于高增益波束成形的大规模 MIMO 阵列 5G 毫米波设计要求在基站 (eNodeB) 部署包含数百个天线单

GSC波束形成严谨推导深入细节
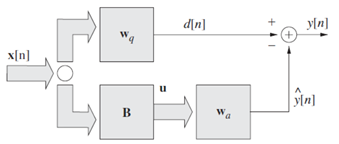
GSC广义旁瓣相消器的结构 如下图所示: u ( t ) = x d ( t ) ⋅ a ( θ d ) + ∑ j = 1 M − 1 x j ( t ) ⋅ a ( θ j ) + N ( t ) u(t)=x_{d}(t) \cdot a\left(\theta_{d}\right)+\sum_{j=1}^{M-1} x_{j}(t) \cdot a\left(\theta_{j}\

LCMV波束形成和GSC波束形成算法原理介绍及MATLAB实现
LCMV波束形成 线性约束最小方差波束形成算法(Linearly constrained minimum variance,LCMV) 为了消除阵列方向图在期望信号出现零陷,采取多个线性约束的方式来强制接收期望信号,即 { min w w H R ^ x w s . t . C H w = f \left\{ \begin{aligned} & \underset{\mathbf{w}}{
波束形成论文翻译:2003_Analysis of Two-Channel Generalized Sidelobe Canceller (GSC) With Post-Filtering
题目:带后置滤波的双通道广义旁瓣相消器(GSC)的分析 代码地址:https://github.com/XiaoxiangGao/Dual_Channel_Beamformer_and_Postfilter 博客作者:凌逆战 博客地址:波束形成论文翻译:2003_Analysis of Two-Channel Generalized Sidelobe Canceller (GSC) With P
五步拳入门之从波束赋形---广义旁瓣相消器(General sidelobe canceller,GSC)
0.概述 低功耗智能语音信号处理业务开发流程首先通过在学术领域中的理论算法结合具体场景选取适当的方法,通过matlab/python先实现算法对音频进行处理,如果结果达到理想效果,再编写C语言工程。编写C工程的过程需要先实现浮点工程,然后可以通过matlab或者Python去改变相关变量的浮点精度去验证变量定标的误差和精度是否在可接受范围。定标将会在后面的文章中补充介绍,定标过后再
基于 GSC 麦克风阵列波束形成 (简述)
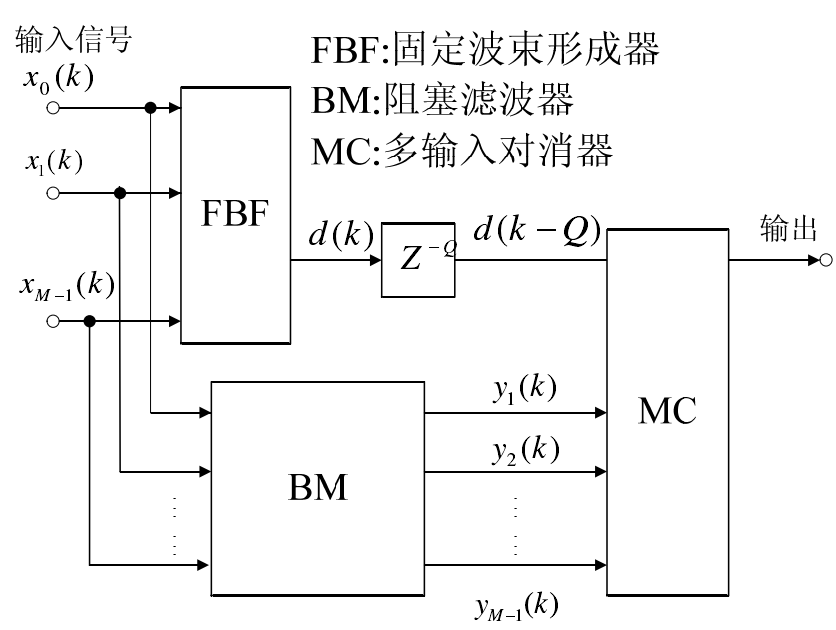
前言:本文参考了网上的一些资料和论述,在此表示感谢! 麦克风阵列波束形成器已被广泛研究用于无线通信,语音识别,语音增强,助听器等等。与其他领域的阵列处理相比,麦克风阵列处理存在由其自己特点所决定的难点。这是由于语音信号在统计学上的非平稳特性,而且通常带有复杂的回声背景。在各种波束形成方法中,自适应波束形成比传统的固定波束形成更有优势,自适应波束形成具有很好的抑制干扰和噪声的性能。Griffith

麦克风波束成形的基本原理
麦克风波束成形的基本原理 2012年04月05日 10:04 eechina 关键词: 波束 , 麦克风 作者:ADI公司Jerad Lewis 简介 所有MEMS麦克风都具有全向拾音响应,也就是能够均等地响应来自四面八方的声音。多个麦克风可以配置成阵列,形成定向响应或波束场型。经过设计,波束成形麦克风阵列可以对来自一个或多个特定方向的声音更敏感。
FDD-MU-mMIMO下针对快速波束训练的用户协同
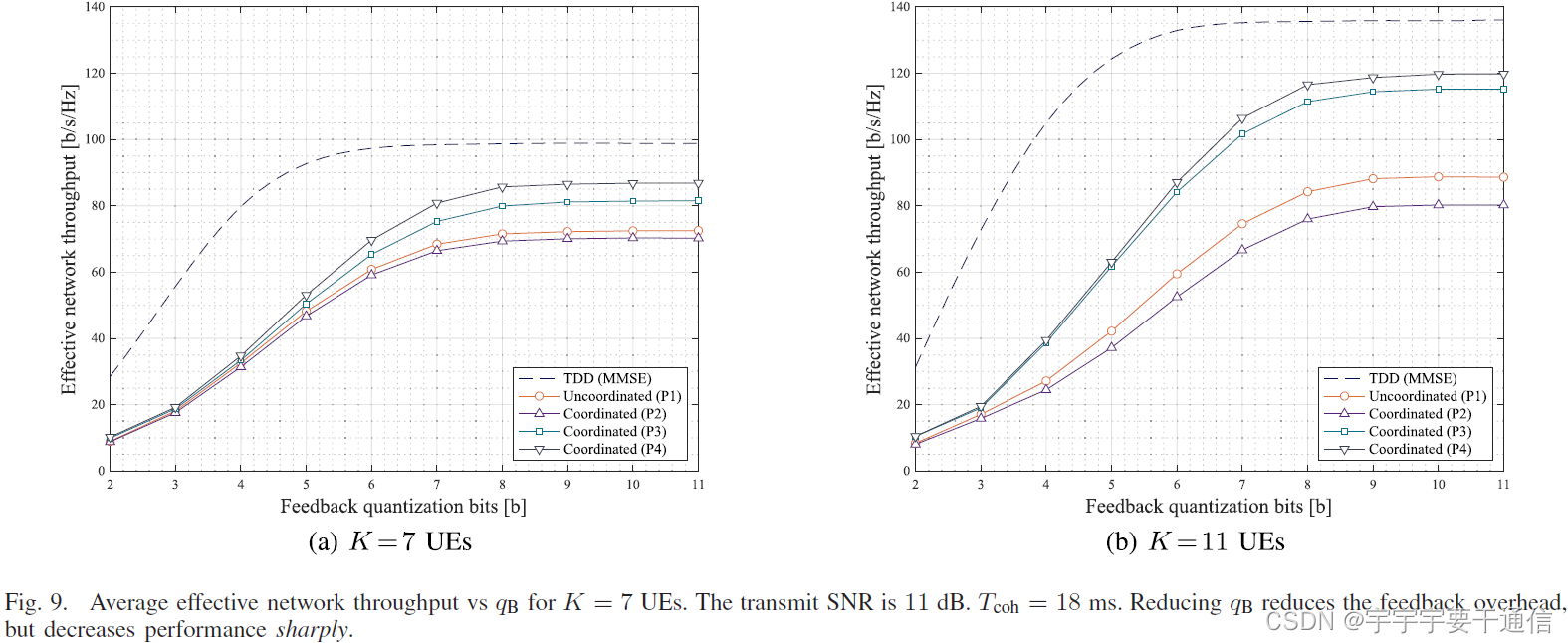
文章目录 背景系统模型基于GoB的信道估计数据信号模型最优预编码器与合并器设计问题 数据波束成形设计GoD波束成形设计最大化有效信道增益最小化用户间干扰最小化训练开销 去中心化的协同波束选择算法仿真结果分析仿真场景参数:仿真结果吞吐量 v.s. SNR相对增益 v.s.信道相关时间吞吐量 v.s. 反馈量化比特 本文是对 User Coordination for Fast B
会议音响系统麦克风阵列波束形成算法C语言实现
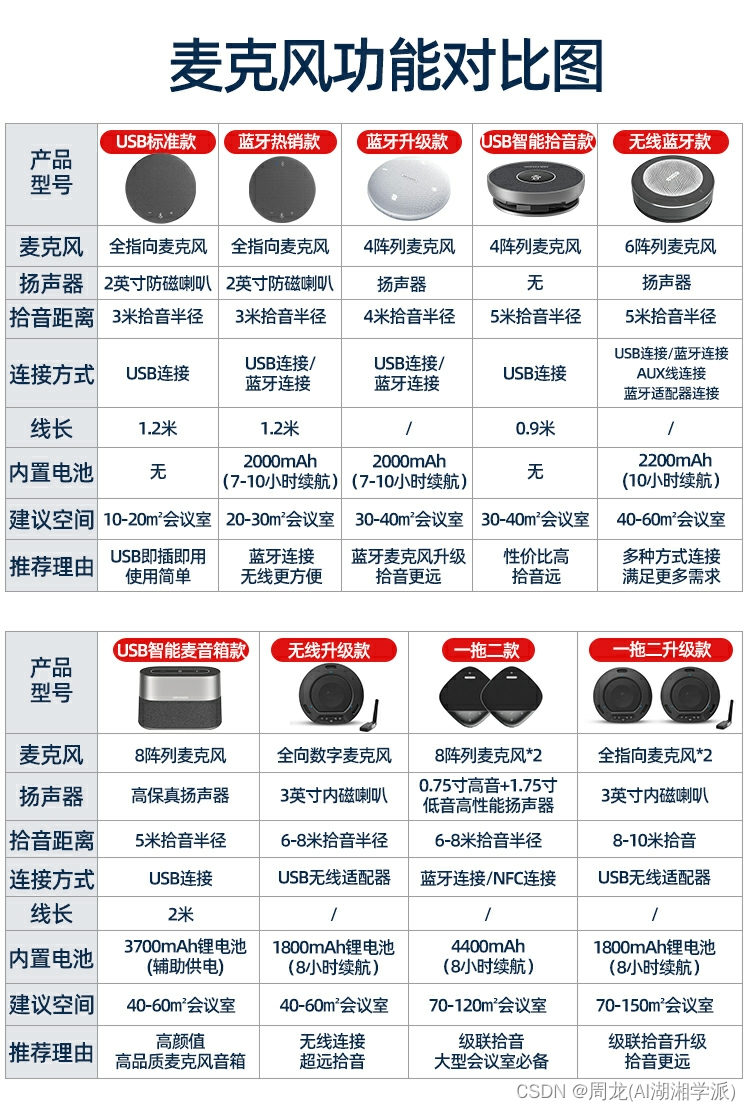
一 应用麦克风阵列波束成形算法做的项目产品 二 麦克风波束形成技术应用领域? 麦克风波束形成技术是一种利用多个麦克风阵列来实现声音定向捕捉和增强的技术。通过对多个麦克风信号进行处理和合成,可以使麦克风系统在特定方向上具有更高的灵敏度和抑制非期望方向上的噪声。 以下是麦克风波束形成技术的一些应用领域: 1 会议系统:在大型会议室或会议中心中,使用波束形成技术可以提高