无迹专题

无迹卡尔曼滤波算法(C语言代码)
无迹卡尔曼滤波(Unscented Kalman Filter, UKF)是一种非线性状态估计算法,它通过无迹变换来处理非线性系统,相比扩展卡尔曼滤波(EKF),UKF在处理非线性系统时更具鲁棒性。下面是一个简单的无迹卡尔曼滤波器的C语言实现示例。这个实现展示了如何定义UKF并进行状态估计。 #include <stdio.h>#include <math.h>#include <strin

【逐行注释】MATLAB下的UKF(无迹卡尔曼滤波),带丰富的中文注释,可直接复制到MATLAB上运行,无需下载
文章目录 程序组成部分完整代码运行结果主要模块解读:运动模型绘图部分误差统计特性输出 程序组成部分 由模型初始化、运动模型、UKF主体部分、绘图代码和输出部分组成: 完整代码 将下列代码复制粘贴到MATLAB里面,即可运行: % 三维状态量的UKF例程% 作者联系方式:微信matlabfilter(除前期达成一致外,付费咨询)% date: 2024-8-7/V
风速预测 | 基于MATLAB的无迹卡尔曼滤波算法UKF、SVR-UKF、ANN-Kalman等时间序列风速预测模型
基本描述 基于MATLAB的无迹卡尔曼滤波算法UKF、SVR-UKF、ANN-Kalman等时间序列风速预测模型 模型步骤 时间序列风速预测模型基于MATLAB的无迹卡尔曼滤波算法(Unscented Kalman Filter, UKF)、SVR-UKF(Support Vector Regression - Unscented Kalman Filter)和ANN-Kalman(Arti

无迹卡尔曼滤波(UKF)推导
pdf和图片链接: 链接:https://pan.baidu.com/s/1q8tIy1q5gqlhYEKH1l8frg 提取码:yyds 1.1概述 无迹卡尔曼滤波(Unscented Kalman Filter),最初由Julier和Uhlmann提出,使用了一种不同的方法来计算误差协方差矩阵。它不使用(连续时间)黎卡提方程(Riccati Equations,形如、 的一类非线性方程)或

基于无迹卡尔曼滤波的路面附着系数估计算法
基于无迹卡尔曼滤波的路面附着系数估计算法 附赠自动驾驶学习资料和量产经验:链接 路面附着系数作为车辆底盘动力学反馈控制中的重要变量,对它的精确估计直接关系到控制系统的平稳运行和车辆行驶安全。但是由于无法通过直接测量获得某些状态参数或者测量方式过于昂贵,因此需要通过估计的方式间接获得该参数值。一种经济有效的方式为采用低成本的传感器通过参数估计方法进行估计,直至得到符合指标的状态参数。目前应用广泛

遗传算法与无迹卡尔曼滤波的荷电状态仿真应用
遗传算法优化UKF噪声协方差,某时刻迭代结果如图。噪声协方差的取值较小,迭代次数不需要设太大。GA在整个UKF迭代过程中都介入算法误差波动会较为明显,可通过判断误差大于设定的允许值载介入,算法稳定性会有所提高。 另外GA很容易陷入局部收敛,交叉和变异的概率可以试一下自适应,交叉和变异操作影响到GA局部收敛问题。
遗传算法与无迹卡尔曼滤波融合进行荷电状态估算
目前阶段学习到由遗传算法(GA)自适应更新无迹卡尔曼(UKF)噪声协方差,这两种方法的结合需要考虑迭代时效问题,主要通过设定的终止代数来限制,前期需要先确定Q、R范围。 初步仿真结果如下: 目前的方案来看,在10000组数据的仿真时间还行,精度和噪声范围以及遗传算法的策略和参数可以进行调整。 然后,带噪声和不带噪声的程序一起调会更容易发现个别数据点噪声增大的原因。

SOC仿真-无迹卡尔曼UKF在电池荷电状态SOC的仿真应用
在前面得到了AFFRLS参数辨识结果,将动态的辨识参数用于SOC估算,估算方法为无迹卡尔曼滤波算法。刚开始学习不太确定自己的结果是不是正确的话,可以参考一下下面的图形。工况为FUDS工况,结果如下 估计器1为AFFRLS参数下的UKF估算,估计器2为辨识结果取平均值后的估算结果。 误差图: Q或R参数需要调试到合适的数值,曲线有高有低说明UKF有对安时积分法其修正作用。后

基于UKF无迹卡尔曼滤波的电池Soc估计matlab仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 电池模型 4.2 无迹卡尔曼滤波(UKF) 4.3 UKF在电池SoC估计中的应用 5.完整工程文件 1.课题概述 通过UKF无迹卡尔曼滤波对电池的SOC进行估计,并对比电池真实的SOC,输出两者的对比仿真结果。 2.系统仿真结果 3.核心程序与模型 版本:MAT

无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用
无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用 卡尔曼滤波是一种强大的状态估计方法,广泛应用于控制系统、导航、机器人等领域。然而,传统的卡尔曼滤波假设系统是线性的,而在实际应用中,许多系统具有非线性特性。为了解决这一问题,无迹卡尔曼滤波(Unscented Kalman Filter, UKF)应运而生,它通过采用无迹变换来处理非线性系统。 线性卡尔曼滤波
Kalman滤波、扩展Kalman滤波、无迹Kalman滤波和异步滤波的原理及其Matlab代码
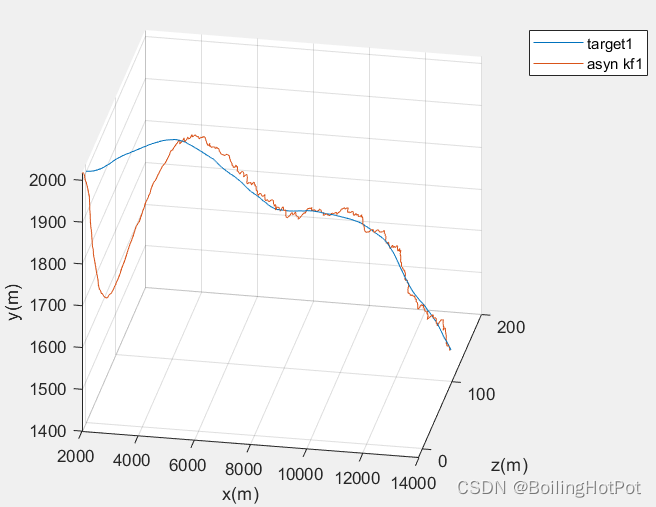
目录 引言Kalman滤波代码及其结果展示 扩展Kalman滤波代码及其结果展示 无迹Kalman滤波无迹变换无迹Kalman滤波代码及其结果展示 异步无迹Kalman滤波原理代码及其结果展示 引言 本文给出了Kalman Filter(卡尔曼滤波)、Extended Kalman Filter(扩展卡尔曼滤波)、Unscented Kalman Filter(无迹卡尔曼滤波)
matlab 无迹卡尔曼滤波
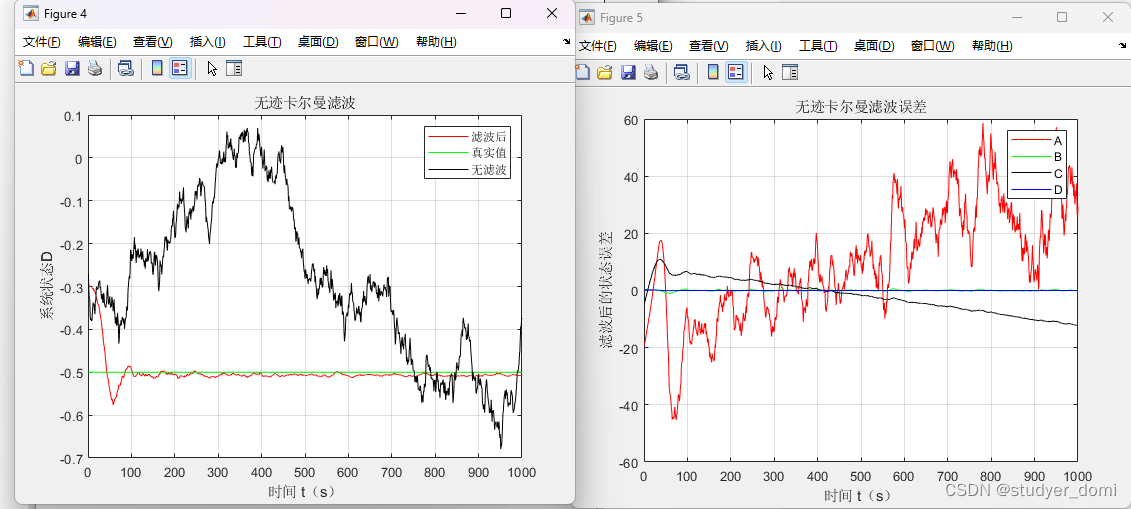
1、内容简介 略 26-可以交流、咨询、答疑 2、内容说明 无迹卡尔曼滤波 无迹卡尔曼滤波 无迹卡尔曼滤波 3、仿真分析 %该文件用于编写无迹卡尔曼滤波算法及其测试%注解:主要子程序包括:轨迹发生器、系统方程% 测量方程、UKF滤波器%---------------------------------------function UKFmain
matlab 无迹卡尔曼滤波
1、内容简介 略 26-可以交流、咨询、答疑 2、内容说明 无迹卡尔曼滤波 无迹卡尔曼滤波 无迹卡尔曼滤波 3、仿真分析 %该文件用于编写无迹卡尔曼滤波算法及其测试%注解:主要子程序包括:轨迹发生器、系统方程% 测量方程、UKF滤波器%---------------------------------------function UKFmain

基于二阶RC模型 自适应无迹卡尔曼滤波算法(AUKF)锂电池SOC估计,噪声系数自适应
基于二阶RC模型 自适应无迹卡尔曼滤波算法(AUKF)锂电池SOC估计,噪声系数自适应 Matlab程序 仿真模型建模数据mat Sci一篇参考文献 YID:39109657373800632 基于二阶RC模型的自适应无迹卡尔曼滤波算法(AUKF)在锂电池SOC估计中被广泛研究和应用。该算法结合了二阶RC模型和无迹卡尔曼滤波算法的优点,能够提高锂电池SOC的估计精度和鲁棒性。本文将对该算法进行