摘录专题

读书摘录《控糖革命》
又到了每周推荐时间,这周末给大家推荐一本书《控糖革命》。身体是革命的本钱,只有保持健康的身体,才能保证持久的生产力,希望我的读者都可以身体健康,青春永驻。 推荐前,首先申明在《控糖革命》一书中,作者提出了一些颇具争议的观点,这些观点并没有经过系统的科学论证,但这并不妨碍我们从中获取一些有益的控糖建议。作者通过分享作者的个人经验和研究,为我们提供了一种全新的饮食理念,帮助我们更好地控制血糖峰值

20151214 要点摘录2
算法: 四火的数据库算法10题 http://www.raychase.net/2810 leetCode解题报告 http://bookshadow.com/leetcode/ 学习算法之路(转) http://blog.csdn.net/sunboy_2050/article/details/5656823 10分钟没有思路的就找例子 http://blog.csdn

20151214 要点摘录1
eclipse用法 --- 涉及到的eclipse的使用 在接口名上按F4 可以看继承关系 按ctrl+T可以找实现类 ctrl+shift+r查找文件 MyBatis的设计主要是把对数据库的增删改查的sql语句和JavaWeb工程的POJO做绑定 1 配置sql语句的映射文件 2 在conf.xml中配置数据库连接并关联sql语句的映射文件 3 在dao中编写代码,加载con

PCI Express 体系结构导读摘录(二)
系列文章目录 PCI Express 体系结构导读摘录(一) PCI Express 体系结构导读摘录(二) 文章目录 系列文章目录第Ⅱ篇 PCI Express 体系结构概述第 4 章 PCIe 总线概述4. 1 PCIe 总线的基础知识4. 1. 1 端到端的数据传递4. 1. 2 PCIe 总线使用的信号4. 1. 3 PCIe 总线的层次结构4. 1. 4

USB3.2 摘录(12)
系列文章目录 USB3.2 摘录(一) USB3.2 摘录(二) USB3.2 摘录(三) USB3.2 摘录(四) USB3.2 摘录(五) USB3.2 摘录(六) USB3.2 摘录(七) USB3.2 摘录(八) USB3.2 摘录(九) USB3.2 摘录(10) USB3.2 摘录(11) USB3.2 摘录(12) 文章目录 系列文章目录10 集线器、主机下游端

《人工智能 一种现代方法》第三版 第7章 逻辑 Agent 笔记摘录
第7章 逻辑 Agent 基于只是的Agent 基于知识的Agent的核心部件事知识库(KB) Wumpus世界:P200 很好理解,不做笔记逻辑 知识库由语句构成:根据表示预言的语法来表达这些语句,语法是为所有合法语句给出规范。语言的语义:定义每个语句再每个可能世界的真值。用术语模型取代“可能世界”:“m是a的一个模型”表

《人工智能 一种现代方法》第三版 第4章 超越经典搜索 笔记摘录
第4章 超越经典搜索 综述: 本章讨论不受环境性质的约束。 一、二状态空间的局部搜索算法,考虑对一个活着多个状态进行评价和修改,而不是系统的探索从初始状态开始的路径。 局部搜索算法包括模拟退火法和进化生物学带来的遗传算法 三、四不在强调环境的确定性和可观察性,主要思想是如果Agent不能准确预测传感器的接受,那么它需要考虑当传感器接收到应急状态发生时该做什么,由于只具备部分可观察性,Ag

《人工智能 一种现代方法》第三版 第3章 通过搜索进行问题求解 笔记摘录
第三章 通过搜索进行问题求解 本章讨论的问题具有如下性质:环境是可观察的、确定的、已知的,问题解是一个动作序列 问题求解Agent 使用原子表示的基于目标的Agent,被称之为问题求解Agent使用要素法或结构化表示的基于目标的Agent,称之为规划Agent基于当前的情形和Agent的性能度量进行目标的形式化是问题求解的第一个步骤为达到目标,寻找行动序列的过程称之为搜索。搜索算法输入是问

USB3.2 摘录(五)
系列文章目录 USB3.2 摘录(一) USB3.2 摘录(二) USB3.2 摘录(三) USB3.2 摘录(四) USB3.2 摘录(五) 文章目录 系列文章目录8 协议层(Protocol Layer)8.12 TP 流程(TP Sequences)8.12.1 块事务处理(Bulk Transactions)8.12.1.1 状态机注释信息(State Machine
关于C与C++区别的摘录
1.博主:恒虚之境 作者:恒虚之境 链接:https://www.zhihu.com/question/28834538/answer/477487776 来源:知乎 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。 大家都知道,上古时代,猿猴用机器代码写程序,而且好像还是01二进制编码的表现方式。这些01代码精确表达了计算机CPU所要做的每一个动作(每一条指令)从内存
GIGE 协议摘录 —— GVSP 协议(三)
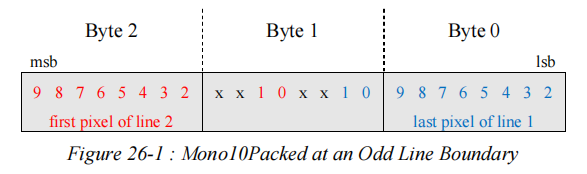
系列文章目录 GIGE 学习笔记 GIGE 协议摘录 —— 设备发现(一) GIGE 协议摘录 —— GVCP 协议(二) GIGE 协议摘录 —— GVSP 协议(三) GIGE 协议摘录 —— 引导寄存器(四) GIGE 协议摘录 —— 照相机的标准特征列表(五) GIGE 协议 2.0 中文版 文章目录 系列文章目录GVSP 摘要UDP 可靠性和错误恢复数据块数据块传输
博客摘录「 AXI三种接口及DMA DDR XDMA介绍(应用于vivado中的ip调用)」2024年6月10日
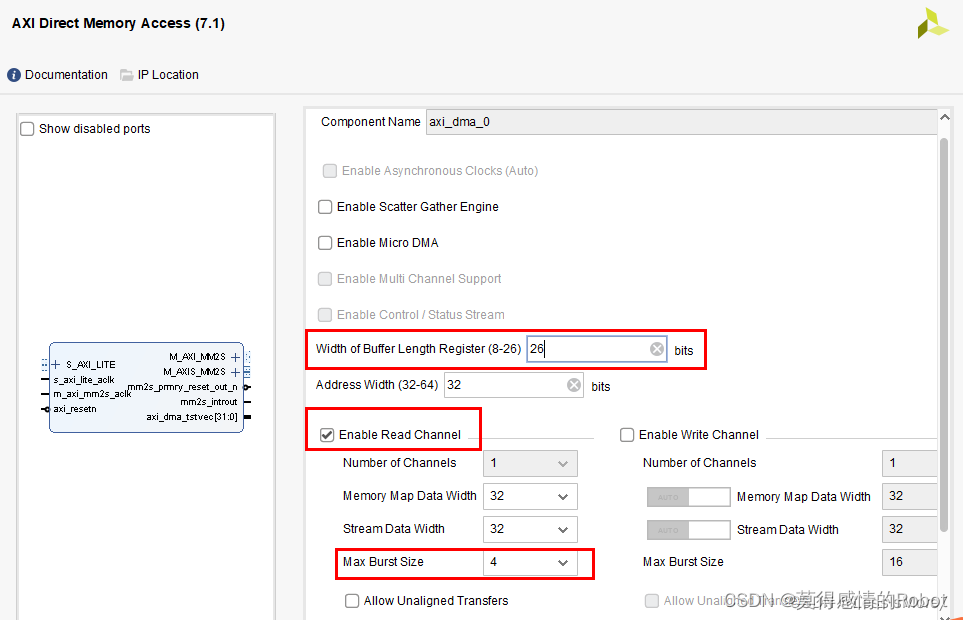
关键要点: 1.AXI Stream经过协议转换可使用AXI_FULL(PS与PL间的接口,如GP、HP和ACP)。 2.传输数据类里就涉及一个握手协议,即在主从双方数据通信前,有一个握手的过程。基本内容:数据的传输源会产生“VALID”信号,来指明何时数据有效或控制信息有效。而在目标源一方,会产生“READY”信号,来指明已经准备好接受数据或控制信息。当“VALID”信号和“READY”信号

Hi3519DV500 学习摘录
文章目录 一、问题1、open-vm-tools 安装2、pushd: not found3、autoreconf4、编译util-linux源码时报错 ERROR: You must have autopoint installed to 二、NFS1、服务器搭建2、u-boot常用命令3、配置4、问题 三、补缺1、make 一、问题 1、open-vm-tool
GIGE 协议摘录 —— GVCP 协议(二)
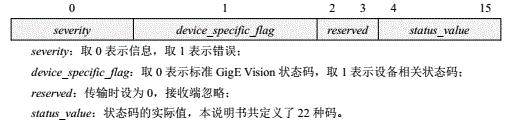
系列文章目录 GIGE 学习笔记 GIGE 协议摘录 —— 设备发现(一) GIGE 协议摘录 —— GVCP 协议(二) GIGE 协议摘录 —— GVSP 协议(三) GIGE 协议摘录 —— 引导寄存器(四) GIGE 协议 2.0 中文版 文章目录 系列文章目录概览一、 基本概念二、通道(1) 控制通道1、控制通道权限2、控制通道寄存器3、打开/关闭控制通道4、控制通

《深度探索C++对象模型》摘录——第一章:关于对象
C++支持多态的方式 C++以下列方法支持多态: 经由一组隐式的转换操作。例如把一个 derived class 指针转化为一个指向其 public base type的指针:shape *ps = new circle(); 经由virtual function机制:ps->rotate(); 经由 dynamic_cast 和 typeid 运算符:if (circle *pc = d
博客摘录「 python——正则表达式(re模块)详解」2023年11月17日
?P<name>) 分组起别名,匹配到的子串组在外部是通过定义的 name 来获取的(?P=name) 引⽤别名为name分组匹配到的字符串
backtrader笔记摘录
策略 在next()里接收当前行情,作出买卖判断,通过buy()和sell()函数下单。 信号 用来通知买和卖,有空头信号、多头信号、空多头信号之分。 指示器 Indicators are always instantiated during __init__ in the StrategyIndicator values (or values thereof derived) are
将要上市的自动驾驶新书《自动驾驶系统开发》中摘录各章片段 2
第五章 感知模块 我们俗称自动驾驶要回答几个问题: 定位-“我在哪儿 (where am I)?”感知-“我周围是什么 (what’s around me)?“预测-“下一步会发生什么(what will happen next)? “规划-“我要做什么(What should I do)? “控制- “怎么做(How to do)? 感知模块相当于自动驾驶车辆的“眼睛”,它跟传感器直接
将要上市的自动驾驶新书《自动驾驶系统开发》中摘录各章片段 1
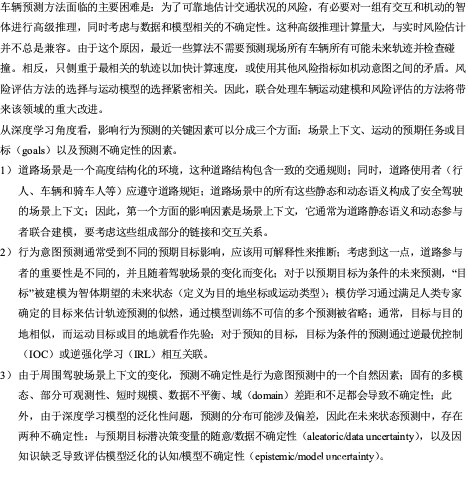
以下摘录一些章节片段: 1. 概论 自动驾驶系统的认知中有一些模糊的地方,比如自动驾驶系统如何定义的问题,自动驾驶的研发为什么会有那么多的子模块,怎么才算自动驾驶落地等等。本章想先给读者一个概括介绍,了解自动驾驶的分级方法,搞清楚自动驾驶的模块化开发和端到端学习开发的区别,以及都有哪些自动驾驶的应用场景。 本章1.1介绍自动驾驶的分级系统,1.2简介系统的模块化结构和开发方法,而1.3是不
百度熊掌号SEO指南1.0,seo重点摘录
百度熊掌号seo指南6月6号发布,一直没有时间去研读,今天粗略的看了一下,内容包含对seo的要求,对网站的要求,对运营的支持,和对熊掌号功能的介绍。由于自己比较注重seo方面,所以今天就先摘了了,熊掌号对seo的一些优势影响以及要求。下次会分享关于建站需求,和运营需求的一些内容,希望能帮到一些朋友。 熊掌号对SEO的意义 对于搜索引擎来说seo是非常重要的,有了熊掌号以后seo

《计算机网络》 摘录
互联网:网络的网络。网络把许多计算机连在一起,互联网把网络通过路由器连接在一起,与网络相连的计算机称为主机。互联网基础结构发展的三个阶段:a,从单个网络向互联网发展;b,三级结构的互联网:主干网,地区网和校园网(企业网),可使用范围逐个缩小;c,多层次isp结构的互联网:主干isp,地区ISP,本地isp互联网组成:边缘部分,指连接在互联网上的所有主机,包括电脑,手机,摄像头等等;核心部分,指大量

软测之魂核心设计 摘录
一。找bug的核心思维与境界 逆向思维,目标都是造房子,但是外界看来好像测试是拆房子发散性思维:测试设计阶段的发散,测试执行阶段的发散(动作分解,动作跳跃等)测试的第一重境界:围着bug转,分为三步:发现,定位,关闭 独上高楼,发现bug:bug是找不完的,并不是没有bug,只是暂时没看到他;锁定“软件测试的目的就是发现bug”,无论用什么方法,仅仅是方法不同,目的是相同的。为伊消得人憔悴,定