循迹专题

基于STM32的红外循迹小车设计与实现
红外循迹小车是一种通过检测反射红外光来自动导航的智能小车。它广泛应用于教育、竞赛和研究领域。本文将详细介绍基于STM32微控制器的红外循迹小车的设计和实现过程。 引言 红外循迹技术利用红外发射器发射红外光,并通过红外接收器检测反射回来的红外光的强度变化来识别路径。STM32微控制器因其强大的处理能力和丰富的外设接口,非常适合用于红外循迹小车的控制。 系统设计 硬件组成 STM32微控制器

视觉循迹小车(旭日x3派、opencv)
基于旭日x3派的视觉循迹小车,未完全实现,参考:https://developer.horizon.cc/forumDetail/146176819622746404 效果硬件视觉循迹原理python代码 效果 硬件 1、旭日x3派(烧录好系统镜像) 2、USB摄像头 3、TB6612 4、小车底盘(直流电机或直流减速电机) 视觉循迹原理 x3派读取摄
视觉循迹小车(旭日x3派、摄像头、循迹)
1、旭日x3派(烧录好系统镜像) 2、USB摄像头 3、TB6612 4、小车底盘(直流电机或直流减速电机) 视觉循迹原理 x3派读取摄像头图像,转换成灰度图像,从灰度图像中选择第 120 行(图像的一个水平线),遍历第120行的全部320列,根据像素值小于或大于阈值,将相应的值(0 或 1)添加到 date 列表中。最后根据小于阈值的像素个数和它们的总和来判断黑色赛道的位置,以此

【智能车入门:pcb版】(蓝牙遥控、超声波避障、红外循迹)
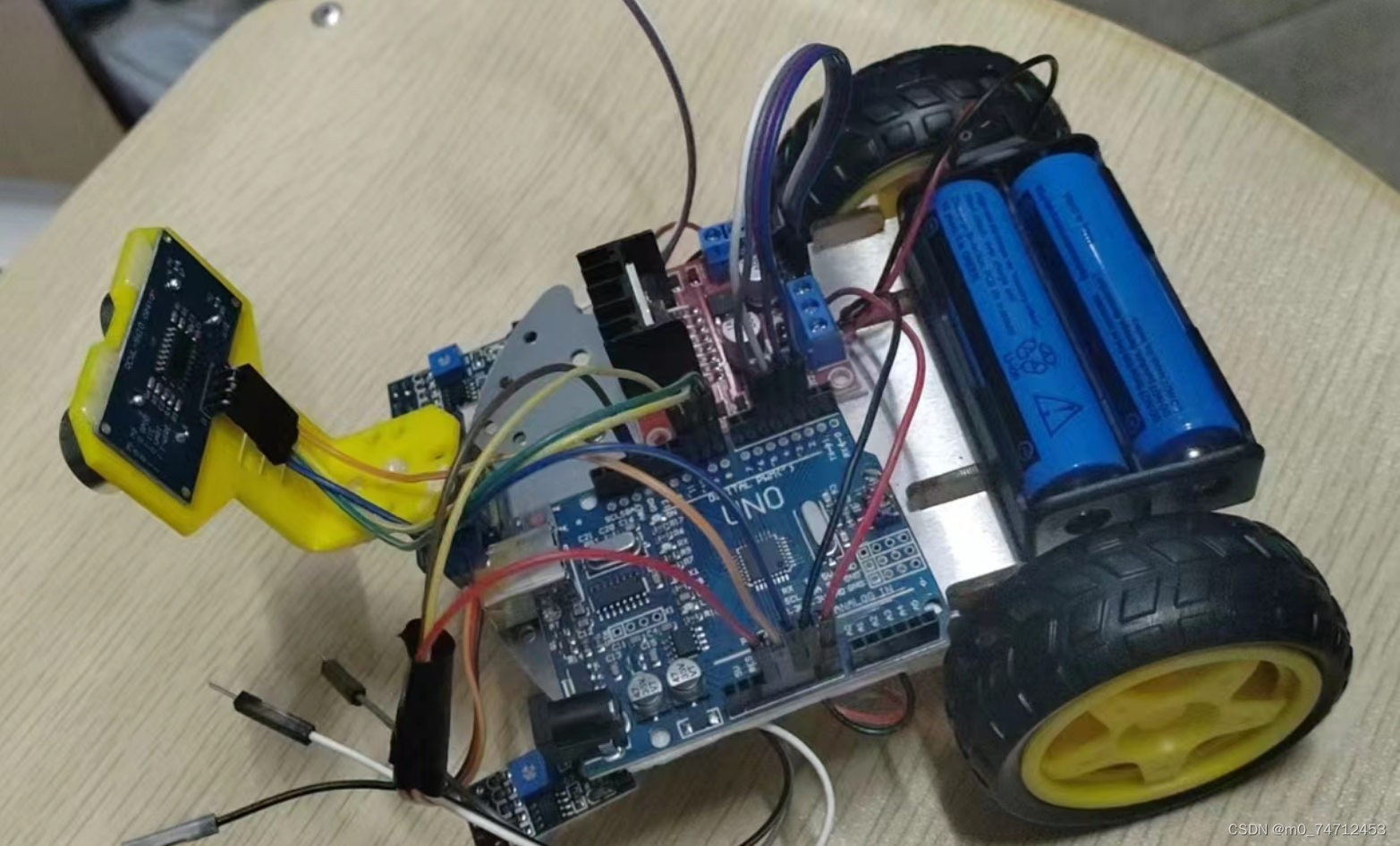
实现最简单的蓝牙遥控、超声波避障、红外循迹) 总览项目获取 本篇是对 上一篇博客的改进,上一篇博客使用面包板,看起来很乱,春节结束之后嘉立创免费打板恢复,板子到了之后进行焊接测试,相较于使用面包板,这次的小车性能更稳定,外观也更简洁了,功能没变。 总览 1、实物图: 2、演示视频: 3、原理图: 4、pcb: 项目获取 工程文件包含源码
智能汽车竞赛摄像头处理(4)——摄像头循迹思路讲解
前言 (1)在上一节中,我们学习了对图像的固定二值化处理,可以将原始图像处理成二值化的黑白图像,这里面的本质就是将原来的二维数组进行了处理。我们要实现的循迹功能就是对这个二值化后的新二维数组进行利用,这个二维数组里的元素都是0和255两个值。 (2)那么我们要在这个二维数组中得到什么?我们最后要得到赛道中线和屏幕中线,屏幕固定的中线是显示图像的宽度的一半,而赛道中线要通过处理后得到。所以我们这
单车模型下pure pursuit循迹
文章目录 1 pure pursuit方法2 实现例子 前置:单车模型及其线性化 1 pure pursuit方法 单车模型下的状态更新为,详细的变量含义在前置链接中 S ˙ = [ x ˙ y ˙ ψ ˙ ] = [ v c o s ( ψ ) v s i n ( ψ ) v t a n ( ψ ) L ] \dot S = \begin{bmatrix} \dot x
基于Arduino UNO的循迹小车
目录 1.analogWrite函数的使用 2.红外循迹模块介绍 3.循迹小车代码实现 4.实物示例 1.analogWrite函数的使用 用analogWrite来替换digitalWrite 说明 将一个模拟数值写进Arduino引脚。这个操作可以用来控制LED的亮度, 或者控制电机的转速. 在Arduino UNO控制器中, analogWrite()函数支持以

STM32循迹小车系列教程(四)—— 使用OpenMV循迹
本章节主要讲解如何使用OpenMV循迹以及OpenMV与STM32串口通信 前言 软件:STM32CubeMx、Keil5 MDK、串口调试助手XCOM、OpenMV_IDE 硬件:OpenMV、STM32F103C8T6核心板、下载器ST_LINK、USB转TTL或J-LINK、小车一辆 OpenMV简介 OpenMV是一个开源,功能强大的机器视觉模块。 它以STM32F427CP

基于单片机智能循迹小车仿真设计
**单片机设计介绍,基于单片机智能循迹小车仿真设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机的智能循迹小车是一种通过传感器检测地面情况,并根据设定的规则进行动作控制的机器人。它使用单片机作为主控制器,通过连接放置在车身底部的红外传感器和电机等组件来实现循迹和运动控制。 二、功能设计 下面是一个基于单片机智
基于单片机的自动循迹小车(论文+源码)
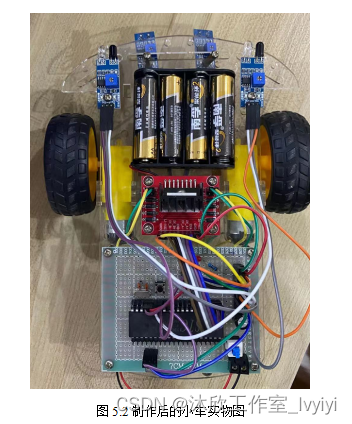
1.系统设计 此次基于单片机的自动循迹小车的设计系统,结合循迹模块来共同完成本次设计,实现小车的循迹功能,其其整体框架如图2.1所示。其中,采用STC89C52单片机来作为核心控制器,负责将各个传感器等模块链接起来;循迹功能,主要由红外检测模块来实现;小车的运动控制,采用直流电机TB6612驱动板配合来完成。 2.实物展示
基于单片机的智能蓝牙避障循迹小车
智能小车循迹与避障运动控制系统的设计 摘 要:本设计主要由STC89C52单片机来进行控制,通过输入输出两个端口控制驱动模块来调节电机的工作状态。本设计预利用机器视觉,通过识别条带状路标实现自主导航且利用超声波模块实时检测距离以实现避障功能,利用光电传感器模块自动循迹以实现循迹功能,通过液晶屏显示小车与障碍物之间的距离。本设计以STC89C52单片机,光电传感器,超声波模块和L298N驱动模块
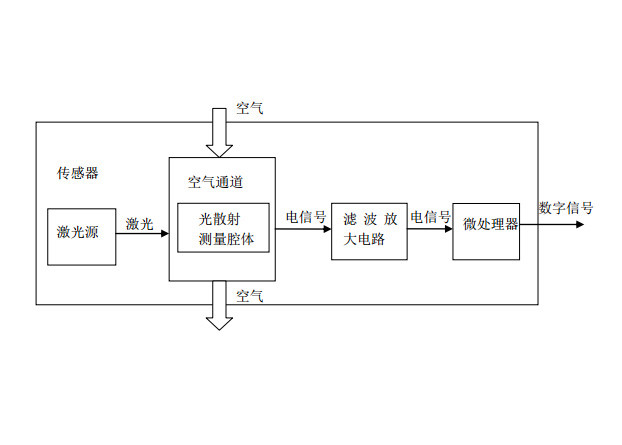
2个红外传感器循迹原理_PM2.5传感器中,激光、红外原理之间的区别
原标题:传感器中,激光、红外原理之间的区别 PM是“particulate matter(颗粒物)”的缩写,悬浮在空气中,直径小于等于微米的称为,又称细颗粒物。与较粗大的颗粒物相比,细颗粒物富含更大量的有毒有害物质,而且能在大气中停留更长时间,输送距离也更远,对大气环境及人体健康的影响也更大,是导致黑肺和雾霾天的主要凶手。 在颗粒物监测设备中,选用的传感器主要有两种:红外原理传感器与激光原
基于51的智能小车(蓝牙、循迹)
文章目录 基本概述 硬件组成功能概述原理图模块介绍 单片机控制模块L298N电机驱动模块红外循迹模块蓝牙模块电源和小车车体小车功能实现及代码介绍 一、基本概述 硬件组成:整个系统包括单片机控制模块,L298N电机驱动模块、循迹模块、蓝牙模块、电源和小车车体 功能介绍:小车的拥有两种功能模式,小车循迹模式和蓝牙控制模式,通过拨动开关给给选择小车的两种模式 原理图:
STM32循迹小车原理介绍和代码示例
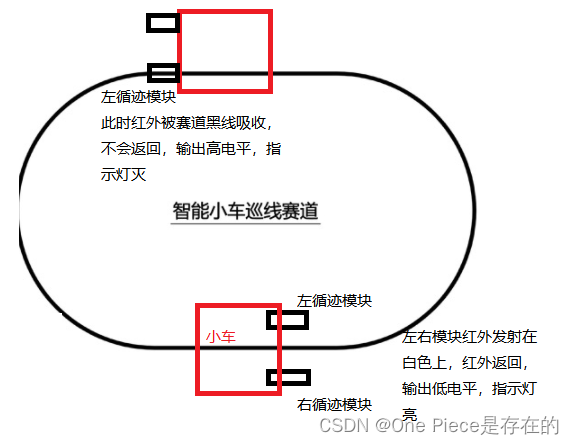
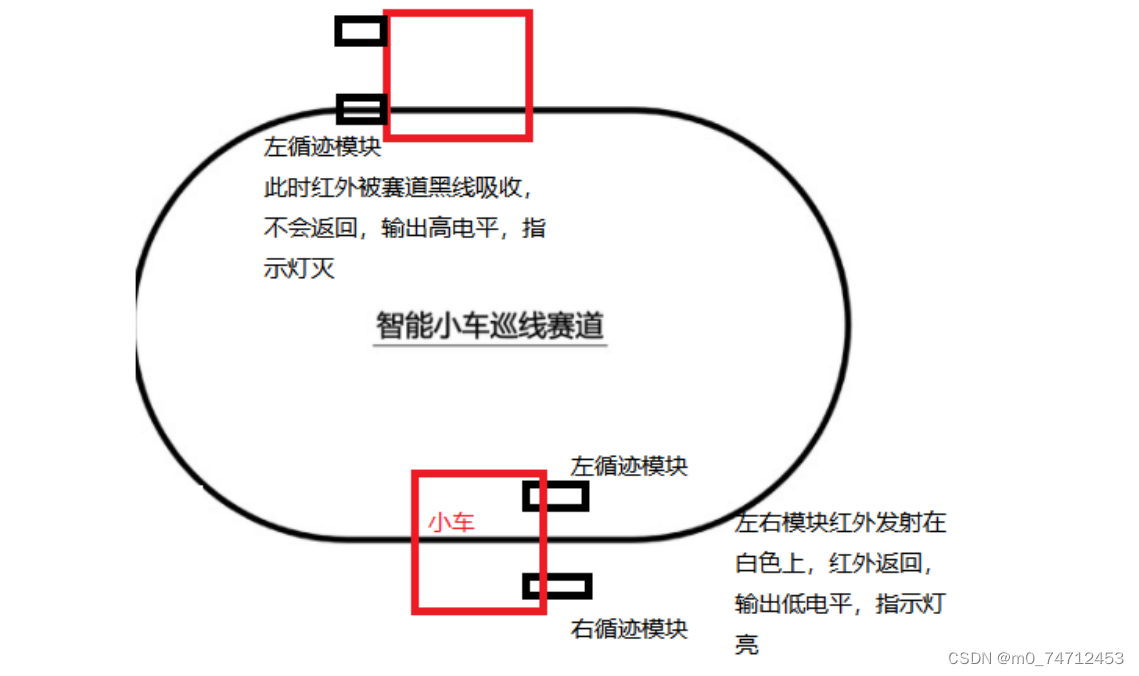
目录 1. 循迹模块介绍 2. 循迹小车原理 3. 循迹小车核心代码 4. 循迹小车解决转弯平滑问题 1. 循迹模块介绍 TCRT5000传感器的红外发射二极管不断发射红外线当发射出的红外线没有被反射回来或被反射回来但强度不够大时红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红
STM32应用开发实践教程:能小车循迹状态获取的应用开发
3.1.1 任务分析 本任务要求设计一个应用程序,以实现周期性地获取智能小车循迹的状态。任务要求使用反 射式红外光电传感器电路板作为智能小车的循迹模块,实现智能小车的巡线前进功能。反射式红 外光电传感器和循迹电路板如图 3-1-1 所示。 反射式光电传感器的光源有多种,常用的有可见光、红外光和激光,本任务选取红外光源。 单个反射式红外光电传感器自带一个红外光源和一个光接收装置,光源发出的光经

基于STM32智能循迹送货小车(一)项目介绍及硬件部分
目录 简介 各模块设计要求 模块清单 整体思路: 模块设计 1、stm32f103c8t6 2、电机驱动模块 3、红外循迹模块 4、超声波避障模块 未完待续 简介 基于stm32的智能送货小车,能够按照地面固定路线进行送货。设置起点及三个送货点,遥控器给出送货指令后,按照地面的黑色标记进行,达到送货点取出货物后,小车可自行回到起点。车上配oled显示器
循迹车辆的一些应用方式
(本文只表达个人观点,不作为专业指导意见) 学习过单片机的人大多接触过循迹小车。然而,目前的AGV基本不使用红外循迹形式。个人认为,虽然可靠性不及目前常用的AGV导航方法,但在成本受限的情况下也可以通过一些方法投入应用。 说明:下文主要讲解路口的形式,在实际使用时应当确认每个路口所代表的位置并结合车辆初始位置和通过路口情况来判断车辆位置,并到达需要的位置。 第一种路线形式 主要适用

智能小车循迹与避障运动控制系统的设计
摘 要 随着我国微型电子技术和嵌入式系统的发展,目前行业内相对比较传统的智能小车系统无法满足客户的需求。为了改进智能小车系统在控制上得短板问题,在本次毕业设计中,将使用相对先进、快捷、智能的控制机制。该系统的控制大脑为核心控制器51系列嵌入式开发系统,主要采用数字控制技术,将输入的连续模拟电压信号转换成离散的数字信号。该智能小车系统设计具有智能控制、数字显示等功能,而且性价比高、度准确、能耗较

Arduino实验二十七 循迹传感器
学习任务: 学会使用循迹传感器 关注微信公众号:爱享生活科技 \color{#FF0000}{关注微信公众号:爱享生活科技} 关注微信公众号:爱享生活科技 组件: Arduion主板循迹传感器双色LED灯模块杜邦线面包板USB数据线 下图是循迹传感器 下图是双色LED灯模块 实验步骤: 1.建立电路 Arduion循迹传感器7D0A0A0GNDGND5vVCC Ard

基于单片机的智能循迹避障小车STC89C52红外对管L298N驱动PWM波控制速度
wx供重浩:创享日记 对话框发送:单片机小车 免费获取完整无水印报告等 利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。 第一章 绪论 1.1智能小车的意义和作用 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航