本文主要是介绍循迹车辆的一些应用方式,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
(本文只表达个人观点,不作为专业指导意见)
学习过单片机的人大多接触过循迹小车。然而,目前的AGV基本不使用红外循迹形式。个人认为,虽然可靠性不及目前常用的AGV导航方法,但在成本受限的情况下也可以通过一些方法投入应用。
说明:下文主要讲解路口的形式,在实际使用时应当确认每个路口所代表的位置并结合车辆初始位置和通过路口情况来判断车辆位置,并到达需要的位置。
第一种路线形式
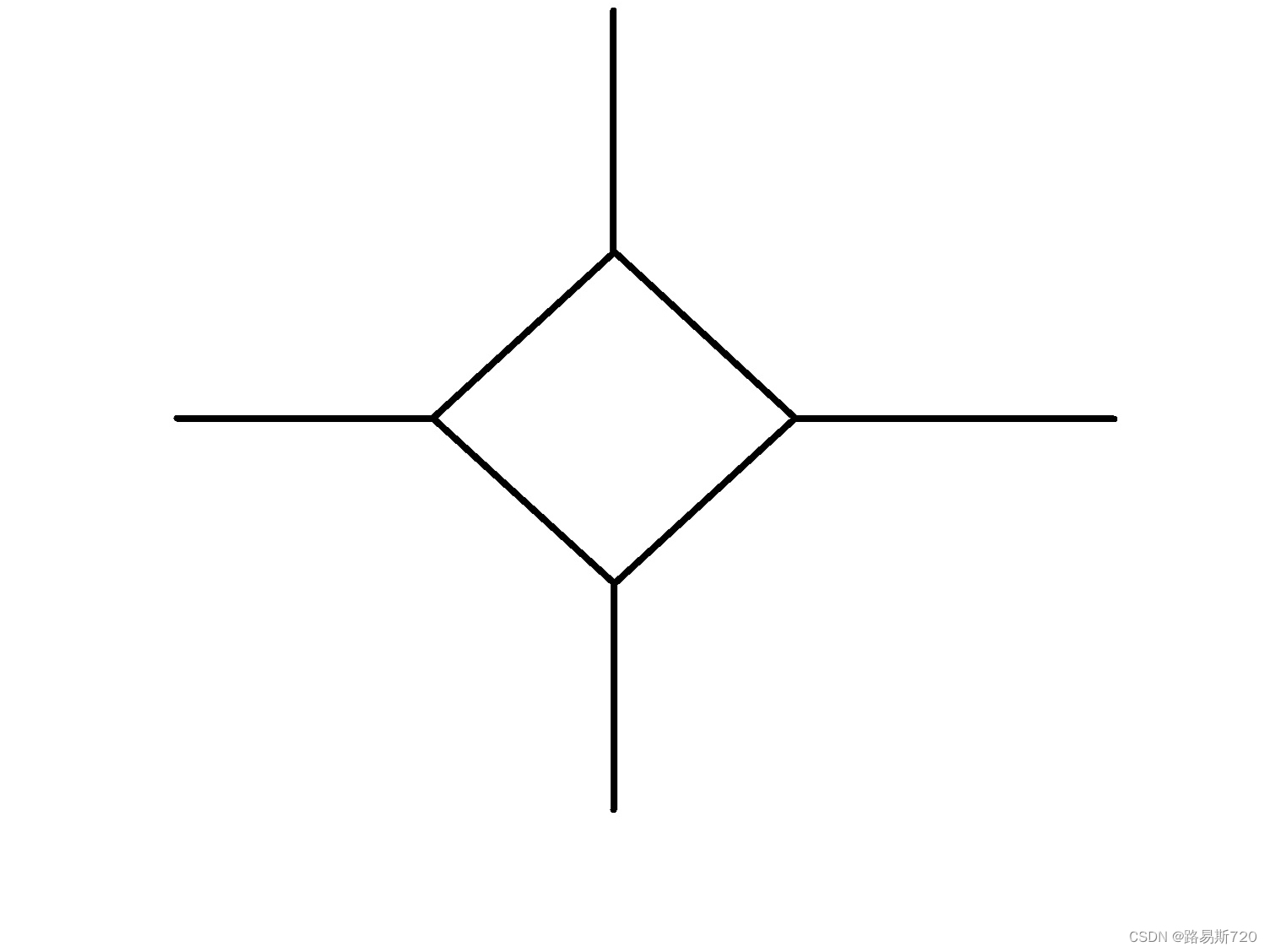
主要适用于下图所示的传感器排列形式, 不推荐用麦克纳姆轮。

直线部分按常规方式巡线,两个传感器都检测到黑线表示进入路口。需要直行时两个传感器都两次越过黑线表示离开路口。需要转向时向相应方向转向越过黑线,直行直到两个传感器都检测到黑线,最后再向相应方向转向越过黑线离开路口。需要掉头时先右转越过黑线后直行,再依次左转、左转、左转最后右转离开路口。
第二种路线形式
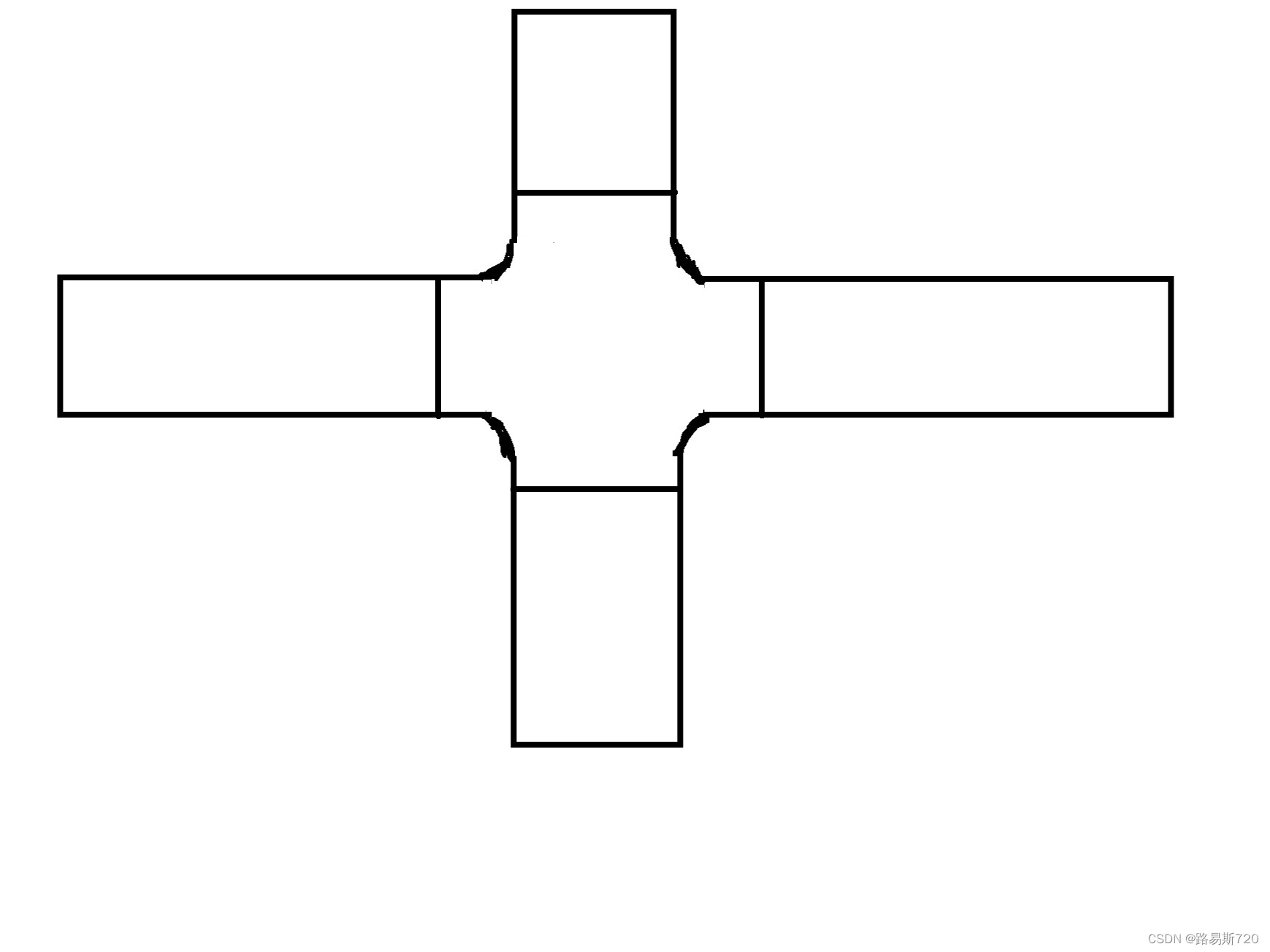
适用于下图所示传感器排列形式的麦克纳姆轮车辆
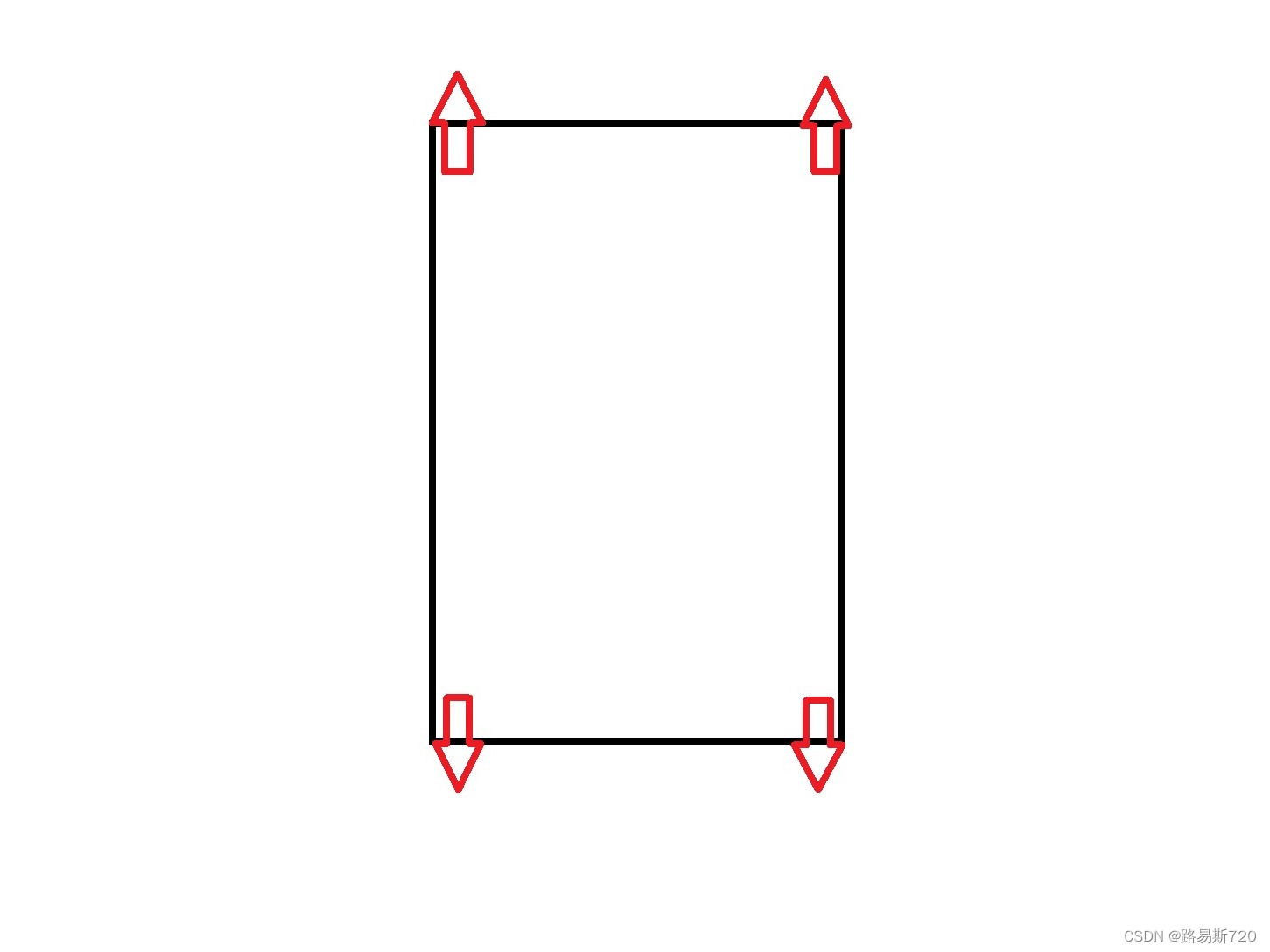
通过检测两边车道边缘进行巡线。巡线时可斜向移动并适时通过调整方向至一侧的两个传感器同时检测到黑线来进行校正。行进方向的两个传感器都检测到黑线时到达路口,越过黑线并到达下一条黑线时小车位于路口中央,可根据需要进行转向或直行。转向直至每个传感器都两次越过黑线表示转过90°,直行越过黑线离开路口。
第三种路线形式
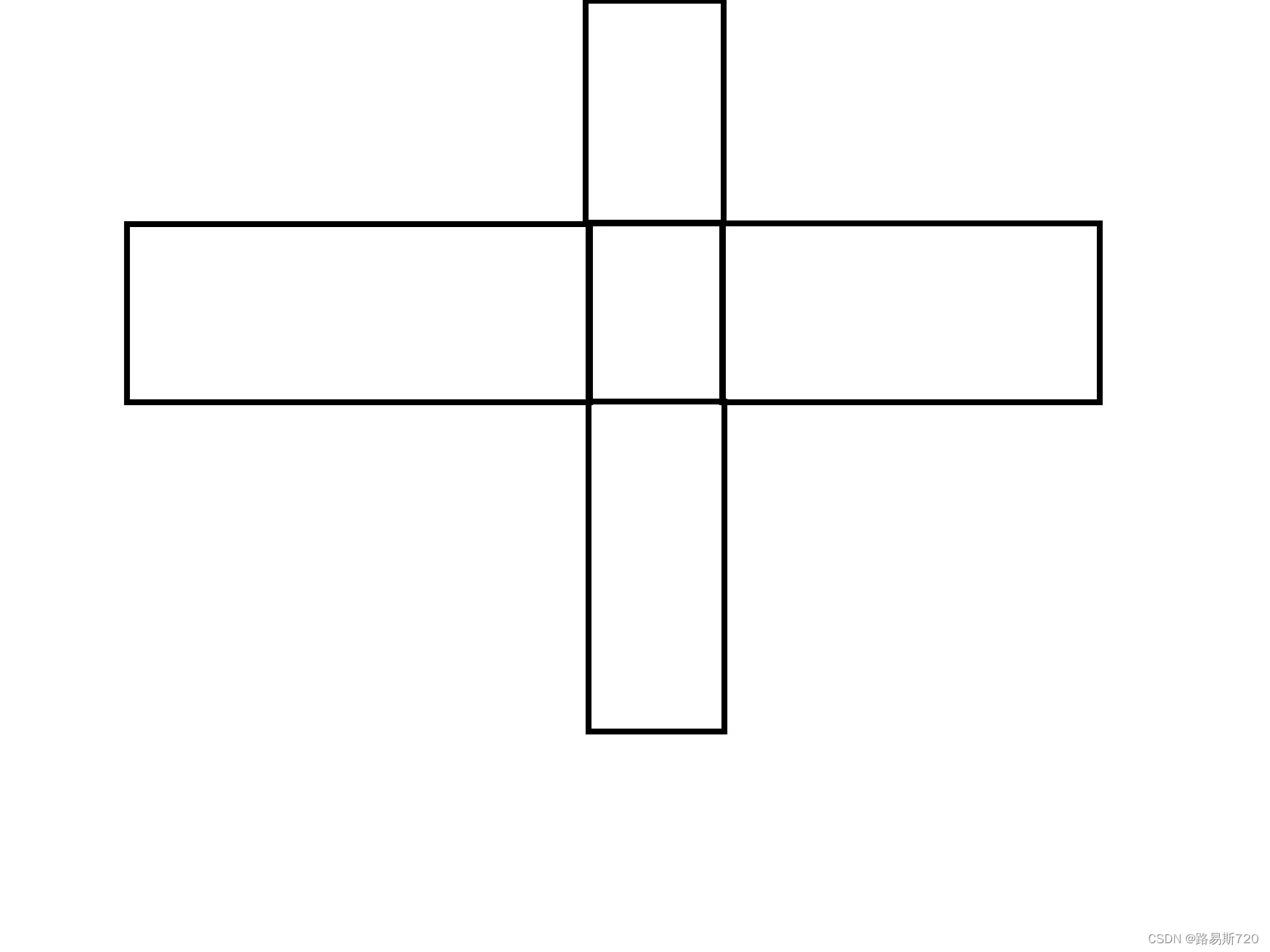
适用车辆与上一种相同。在路口中可以直接切换横竖方向,同样是越过黑线代表进入或离开路口,校正方式也相同。
改进方法 :
1.使用超声波传感器检测障碍物,并在接近障碍物时停止。可增加避障措施。
2.使用编码器电机以确保直行,提高效率和可靠性。
这篇关于循迹车辆的一些应用方式的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



