本文主要是介绍2个红外传感器循迹原理_PM2.5传感器中,激光、红外原理之间的区别,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原标题:传感器中,激光、红外原理之间的区别
PM是“particulate matter(颗粒物)”的缩写,悬浮在空气中,直径小于等于微米的称为,又称细颗粒物。与较粗大的颗粒物相比,细颗粒物富含更大量的有毒有害物质,而且能在大气中停留更长时间,输送距离也更远,对大气环境及人体健康的影响也更大,是导致黑肺和雾霾天的主要凶手。

在颗粒物监测设备中,选用的传感器主要有两种:红外原理传感器与激光原理传感器。
红外原理传感器由于精度不够主要用于工矿扬尘,检测对象为大粒径、高浓度粉尘,检测级别是mg/m3,无法准确测量的浓度,只能检测灰尘污染程度,当然早期的空气净化器也是使用这种原理传感器,测量结果仅供参考,准确度偏低,一般用于判断灰尘污染程度等级。
后来激光型传感器的诞生,可以精确测量浓度,主要应用在检测领域,可嵌入到家用(车载、手持)空气检测仪、空气净化器中,新型激光型传感器是基于定量测量,可检测μm的颗粒物,能够精确测量、、PM10的数值,精度高。
那么两者之间有什么区别呢?
1、结构原理
红外原理传感器的结构和电路相对简单。其光源为红外LED光源,气流进出风口主要靠电阻发热以获得热气流流动,当有颗粒物通过时,接触到LED光源之后发生反射现象,光敏探测器接收到不同强度的反射光,再通过放大处理及运算后得到检测结果。
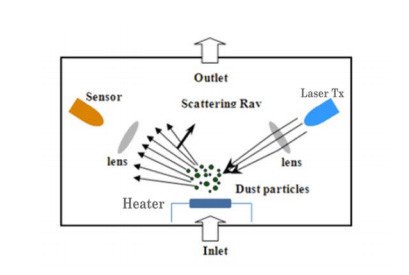
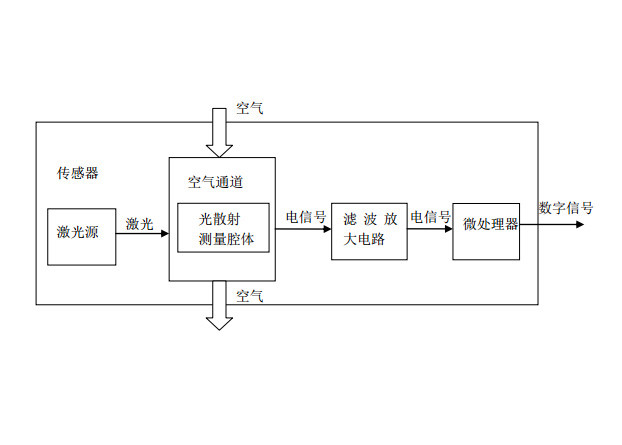
而激光原理传感器的结构和电路相对复杂。其光源为激光二极管。采样空气通过风扇或鼓风机推动,通过复杂设计的风道,进行检测。当空气中的细颗粒物进入激光束所在区域时,将使激光发生散射;散射光在空间360°都有辐射,在适当位置放置光电探测器用以接收散射光,然后经过光电探测器的光电效应产生电流信号,经运放电路放大及处理后,即可得到细颗粒物浓度值。输出信号可用串口、I C、PWM等多种方式。
2、测量精度与寿命
红外原理传感器只能检测到1um以上的颗粒,测量精度不足。因为红外LED光散射的颗粒信号较弱,只对大于1um的大颗粒有响应,而且又仅用加热电阻来推动采样气流,采样数较少,数据计算完全交由上位机进行。
而激光原理传感器可以检测到um以上的颗粒。因为自带高性能MCU,采用风扇或鼓风机采集大量数据,经由专业颗粒物计数算法分析,所以,在采样方式、数据准确性、算法处理等方面都比红外传感器更有优势。
3、价格与成本
红外原理传感器由于结构简单所以成本一般在20~50元之间。
而激光原理传感器由于结构相对复杂,市场价格在90-180元之间。因为增加了激光发生器和风机等机构并且需要复杂电路结构,技术门槛较高,所以价格较贵一些。
4、发展趋势
在激光原理传感器进入民用领域之前,很多监测的仪器都采用红外原理传感器。但是随着传感器行业的发展,加上一些大厂实现了激光原理传感器的批量化生产,激光原理传感器的造价在逐步降低。
来自:建大仁科,江苏激光联盟转载返回搜狐,查看更多
责任编辑:
这篇关于2个红外传感器循迹原理_PM2.5传感器中,激光、红外原理之间的区别的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






