对极专题

对极约束及其性质 —— 公式详细推导
Title: 对极约束及其性质 —— 公式详细推导 文章目录 前言1. 对极约束 (Epipolar Constraint)2. 坐标转换 (Coordinate Transformations)3. 像素坐标 (Pixel Coordinates)4. 像素坐标转换 (Transformations of Pixel Coordinates)5. 本质矩阵 (Essential Matr

计算机视觉对极几何之Triangulate(三角化)
Overview 欢迎访问 持续更新:https://cgabc.xyz/posts/fea220cc/ 求解空间点坐标 Triangulate in ORB-SLAM2 已知,两个视图下匹配点的 图像坐标 p 1 \boldsymbol{p}_1 p1 和 p 2 \boldsymbol{p}_2 p2,两个相机的相对位姿 T \boldsymbol{T} T ,相机内参矩阵

【计算机视觉】Lecture 18:广义的立体视觉:对极几何
广义的立体视觉 主要思想:任何两张有重叠视图的图像,它们都可以被视为一对立体图像 我们只需要弄清楚这两个视图是如何关联的 视觉中一些最“漂亮”的数学问题是描述多个视图之间的几何关系。 回忆:对极约束(Epipolar Constraint) 重要的立体视觉概念: 给定左图像上的一个点,我们不必在整个右图像中搜索对应的点 “对极约束”将搜索空间缩小为一条一维的直线。 回顾:简单的立体

计算机视觉基础4——对极几何(Epipolar Geometry)
先思考一个问题:用两个相机在不同的位置拍摄同一物体,如果两张照片中的景物有重叠的部分,我们有理由相信,这两张照片之间存在一定的对应关系,本节的任务就是如何描述它们之间的对应关系,描述工具是对极几何 ,它是研究立体视觉的重要数学方法。 要寻找两幅图像之间的对应关系,最直接的方法就是逐点匹配,如果加以一定的约束条件对极约束(epipolar constraint),搜索的范围可以大大减小。

3D视觉(五):对极几何和三角测量
3D视觉(五):对极几何和三角测量 对极几何(Epipolar Geometry)描述的是两幅视图之间的内在射影关系,与外部场景无关,只依赖于摄像机内参数和这两幅试图之间的的相对姿态。 文章目录 3D视觉(五):对极几何和三角测量一、对极几何二、三角测量三、实验过程四、源码五、项目链接 一、对极几何 假设我们从两张图像中得到了一对配对好的点对,如果有若干对这样的匹配点对,就可

多视几何:对极几何的代数表示--基本矩阵F
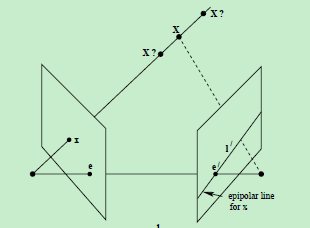
对极几何的基本概念中是对对极几何的基本形式进行了描述,但并没有从数学角度对其进行描述,而基本矩阵正是对对极几何的代数描述 1.总述 对极几何描述的就是点x和它的对极线l’之间的关系: l′=Fx l'=Fx,其中,矩阵F称为基本矩阵 下面,分别从几何角度和代数角度对上式进行推导 2.几何推导 从几何角度推导关于对极几何方程,如下图所示 图像点x是空间点X在图像1中的
《SLAM十四讲》7.4 对极约束求解相机运动(代码详解)
先上完整代码,稍后进行详细解释 完整代码包括上一章讲到的ORB特征检测与匹配部分,在这里ORB部分的内容封装到了函数find_feature_matches()中。 关于该代码的介绍《十四讲》中的原话是:“上一节实践部分的程序提供了特征匹配,而这次我们就使用匹配好的特征点来计算 E,F 和 H,进而分解 E 得到 R,t。整个程序使用 OpenCV 提供的算法进行求解。我们把上一节的特征提取封装成

关于对极几何的一些个人理解
对极几何其实就是将相机光心和特征点与空间点约束在一个平面上。 如图,相机光心在O1位置时观测到空间点P投影到成像平面的p1上,接着相机运动,相机运动到光心在Or位置的时候观测到空间点P投影到成像平面上的pr处,此时O1、p1、P、Or、pr在一个平面上。 根据相机模型,可以轻松的得到:s1p1=KP,s2pr=K(RP+t)===>归一化坐标
【三维重建】对极几何
极几何描述了同一场景或者物体的两个视点图像间的几何关系 可以发现P在左右相机的投影点一定在各自的极线上,如果求出极线就能缩小求解对应点的范围。 本质矩阵对规范化摄像机拍摄的两个视点图像间的极几何关系进行代数描述 规范化相机指的是相机的内参矩阵为一个单位矩阵 设是在坐标系下的坐标,则: 因此,在坐标系下的坐标为 同理:在坐标系下的坐标为 得到两个向
【计算机视觉】对极几何
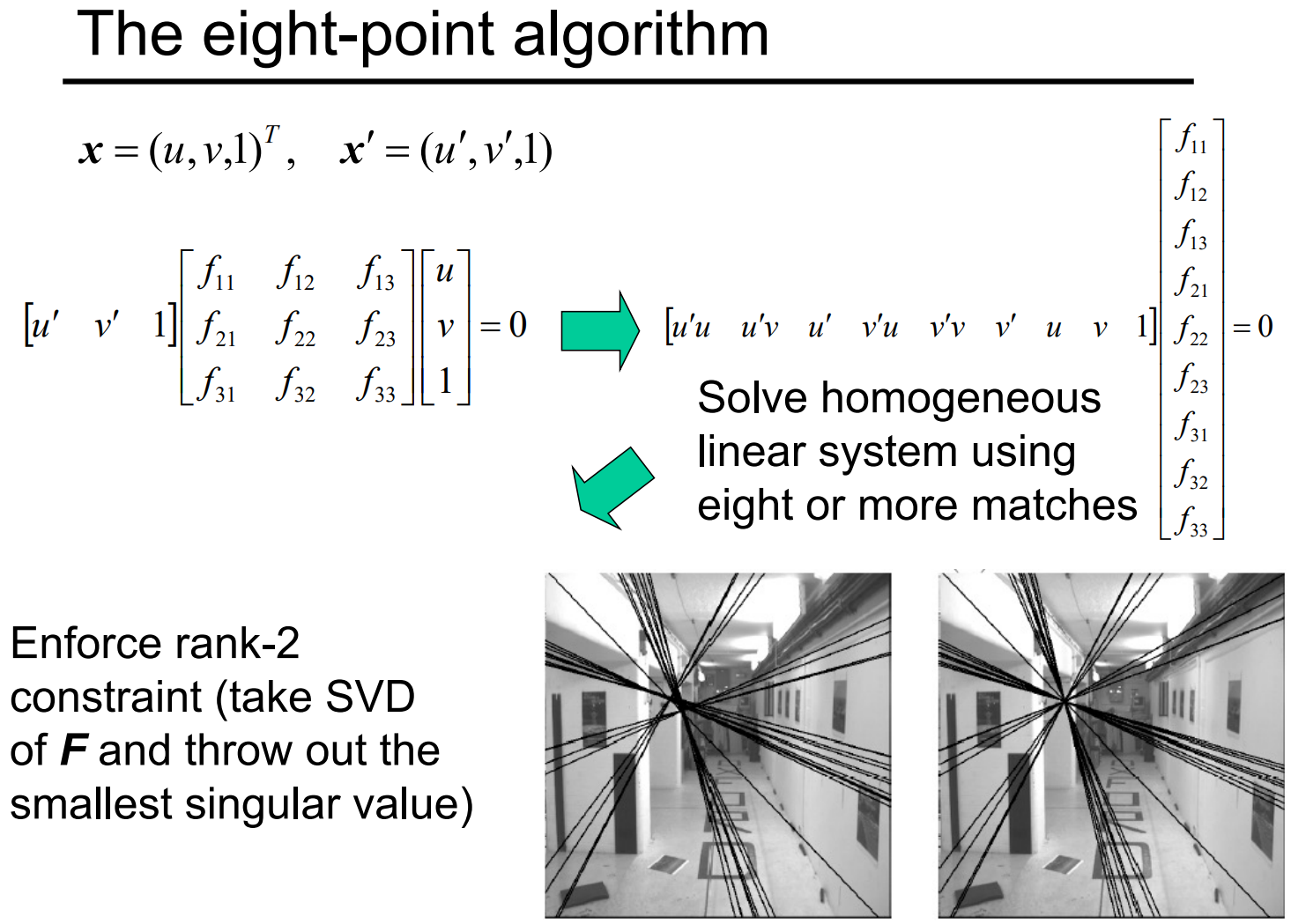
文章目录 一、极线约束(Epipolar Constraint)二、相机标定过的情况三、相机没有标定过的情况四、八点算法(eight-point algorithm) 我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。 在上一篇文章3D视觉中我们介绍了在两个照相机像平面共面的情况下如何计算深度:深度与景物在图片中的位移成反比。这篇文章
![[三维重建] 对极几何约束、本质矩阵、基础矩阵、单应矩阵](https://img-blog.csdnimg.cn/c904107838a44dcd9ca0b57a5eb19f43.png)
[三维重建] 对极几何约束、本质矩阵、基础矩阵、单应矩阵
一、对极几何约束 假设相机从 O 1 O_1 O1经过旋转平移运动, R , t R,t R,t,到达新的位置 O 2 O_2 O2 。 I 1 , I 2 I_1,I_2 I1,I2分别为相机在两个位置的成像平面,空间中同一点 P P P,在两个成像平面上的投影分别为 p 1 , p 2 p_1,p_2 p1,p2。 极平面: O 1 , P , O 2 O_1,P,O_2 O1