原点专题

SW - 引入第三方dwg图纸后,修改坐标原点
文章目录 SW - 引入第三方dwg图纸后,修改坐标原点概述笔记设置图纸新原点END SW - 引入第三方dwg图纸后,修改坐标原点 概述 在solidworks中引入第三方的dwg格式图纸后,坐标原点大概率都不合适。 全图自动缩放后,引入的图纸离默认的原点位置差很多。 需要自己重新设置原点位置,才能自动缩放后,在工作区中间显示引入的图纸。 笔记 将dwg图纸拖到SW中

原点安全荣获“AutoSec Awards 安全之星”优秀汽车数据安全合规方案奖
9月3日,「AutoSec 2024第八届中国汽车网络安全周暨第五届智能汽车数据安全展」在上海盛大开幕。本届大会由谈思实验室和谈思汽车主办、上海市车联网协会联合主办,以汽车“网络数据安全、软件安全、功能安全”为主题,汇聚了国内外的技术专家、学者及企业代表,共同探讨汽车网络数据安全技术的最新成果与未来趋势。 同期,专属于汽车网络信息安全行业的“AutoSec Awards 安全之星”第五届中国

喜讯!原点安全荣获北京市“专精特新”中小企业认定
2024年8月14日,北京市经济和信息化局正式发布了《关于对 2024 年第二季度北京市专精特新中小企业名单进行公告的通知》。北京市“专精特新”企业评选认定严格,经过对企业的经营条件、专业化程度、创新制造能力等多个维度的严格考察、评审及公示程序,北京原点数安科技有限公司(简称“原点安全”)成功入选,荣获北京市“专精特新”中小企业称号。 原点安全荣获北京市“专精特新”中小企业称号,这不仅是对公

计算绕原点旋转某角度后的点的坐标
问题: A点(x, y)按顺时针旋转 theta 角度后点的坐标为A1点(x1,y1) ,求x1 y1坐标用(x,y)和 theta 来表示 方法一: 设 OA 向量和x轴的角度为 alpha , 那么顺时针转过 theta后 ,OA1 向量和x轴的角度为 (alpha - theta) 。 使用圆的参数方程来表示点坐标。A的坐标可以表示为: \[\left\{ {\begin{ar

二维空间中的点绕原点的旋转矩阵是怎么来的?(内含视频讲解)
如是我闻: 如果直接看书的话,他会告诉你二维空间中点的旋转变换的定义是这样的。 R ( β ) = [ cos ( β ) − sin ( β ) sin ( β ) cos ( β ) ] \mathbf{R}(\beta) = \begin{bmatrix} \cos(\beta) & -\sin(\beta) \\ \sin(\beta) & \cos(\beta) \e
![Nyoj 298 点的变换[利用矩阵求解坐标点的转换,平移,绕原点旋转,沿x,y轴翻转]](http://www.matrix67.com/blogimage/200708043.gif)
Nyoj 298 点的变换[利用矩阵求解坐标点的转换,平移,绕原点旋转,沿x,y轴翻转]
题目链接:acm.nyist.net/JudgeOnline/problem.php?pid=298 题目的意思就是给你一n个点(n<=10000),求m次操作后(m<=1000000),各点变为什么了?操作有:平移,绕原点旋转,沿x,y轴翻转。 思路,利用矩阵相乘来解决。。这个很有意思。。 先来补充一下矩阵相乘的知识。。。。 First, 我们必须需要知道的是,矩阵相乘满足结合律,但是,

AI笔记: 数学基础之数字特征-标准差、协方差、相关系数、中心矩、原点矩、峰度、偏度
标准差 标准差(Standard Deviation)是离均值平方的算术平均数的平方根,用符号 σ \sigma σ 表示,其实标准差就是方差的算术平方根标准差和方差都是测量离散趋势的最重要、最常见的指标。标准差和方差的不同点自傲与,标准差和变量的计算单位是相同的,比方差清楚,因此在很多分析的时候使用的是标准差 σ = D ( X )
最接近原点的 K 个点 【leetcode - 973 - 简单】
思路: 1、这个题应该是很简单的,但是我的代码写的比较复杂。 2、如果熟悉优先队列的朋友应该会写出比较好的算法。 3、我这个就是先存前K个元素,之后再去找出前K个元素最大一个结果,去和当前的对比。 4、我这个算法之后每次都要便利K次以便找到最大的值。 5、优先队列先前就排序好了前K个元素。比较的时候就简单了 class Solutio
B - Memory and Trident CodeForces - 712B(回到原点,水题)
Input The first and only line contains the string s (1 ≤ |s| ≤ 100 000) — the instructions Memory is given. Output If there is a string satisfying the conditions, output a single integer — the minimu

cocostudio骨骼动画 -- 原点
1、如果把一个元素如CCSprite加入到CCArmature中,那么必须先要知道CCArmature的原点位置, 经过测试发现:原点大致在(下图所示),x居中,y位于底部。 2、 CCArmature本身继承与CCNode,所以可以设置 锚点和位置,但是CCArmature的大小,也可以说是上下左右的边界如何计算还不是很明白。 看下面的代码: void CCArmatu

软件随想录(local.joelonsoftware.com/wiki)-2002年12月11日 回归原点 - Back to Basics
2002年12月11日 回归原点 - Back to Basics The Joel on Software Translation Project:回归原点 From The Joel on Software Translation Project Jump to: navigation, search 回归原点 作者:周思博 (Joel Spolsky) 译:Paul
canvas坐标系统 webgl坐标系统 uv纹理坐标系统 原点
一、canvas原点在左上角,x轴正方向向右,y轴正方向向下,一个点对应一个像素 二、webgl原点在正中间,x轴正方向向右,y轴正方向向上,数据显示范围在[-1,1]之间,超过此范围不显示数据 三、uv原点在左下角,x轴正方向向右,y轴正方向向上,数据范围在[-1,1]之间
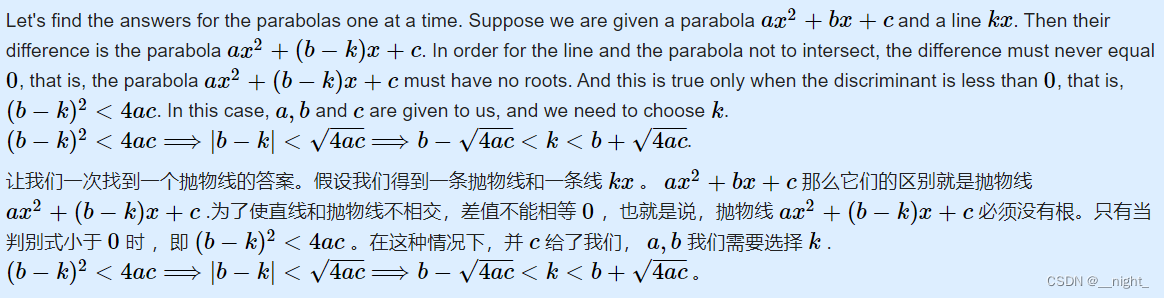
(坑点!!!)给定n条过原点的直线和m条抛物线(y=ax^2+bx+c,a>0),对于每一条抛物线,是否存在一条直线与它没有交点,若有,输出直线斜率
题目 思路: 1、区间端点可能是小数的时候,不能直接利用加减1将 < 转化为 <=,例如,x < 1.5 不等价于 x <= 2.5 2、该题中k在(b - sqrt(4 * a * c), b + sqrt(4 * a * c) 中,注意是开区间,那么可以将左端点向上取整,右端点向下取整,即sqrt(4 * a * c)向下取整,计算出左右端点l,r,那么k在[l, r] 中(闭区间)
657.机器人能否返回原点(Java)
题目描述 在二维平面上,有一个机器人从原点 (0, 0) 开始。给出它的移动顺序,判断这个机器人在完成移动后是否在 (0, 0) 处结束。 移动顺序由字符串 moves 表示。字符 move[i] 表示其第 i 次移动。机器人的有效动作有 R(右),L(左),U(上)和 D(下)。 如果机器人在完成所有动作后返回原点,则返回 true。否则,返回 false。 注意:机器人“面朝”的方向无关紧
vtkNIFTIImageReader读写方位以及原点信息
使用vtkNIFTIImageReader读取体数据为vtkImageData时只会携带spacing信息,方向和原点信息不会写入,需要获取QFormMatrix进行解析。 1、方向及原点读取 vtkSmartPointer<vtkNIFTIImageReader> niiReader = vtkSmartPointer<vtkNIFTIImageReader>::New()
北京54坐标系:参心坐标系,采用的克拉索夫斯基椭球参数,原点在前苏联的普尔科沃;西安80坐标系:1975国际大地测量与地球物理联合会第十六届大会推荐的数据,原点在泾阳镇永乐镇,CGCS2000坐标系为
这里写自定义目录标题 欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants 创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入

提示用户输入一个点(x,y),然后检查这个点是否在以原点(0,0)为圆心、半径为10的圆内。
package spurs_ping; import java.util.Scanner; /*编写程序,提示用户输入一个点(x,y),然后检查这个点是否在以原点(0,0)为圆心、半径为10的圆内。 输入格式:输入任意一个点的x轴和y轴坐标值,且两个值之间空格分隔。输出格式:若点在圆内,输出1,否则输出0。输入样例:4 5输出样例:1 / public class nets_spurs_ping

几大空三软件的图像坐标系的原点
几大空三软件的图像坐标系的原点 根据软件文档: Metashape Metashape的图像特征点所在的坐标系都是左上角像素的中心为(0,0),左上角像素的右下角为(0.5,0.5)的XRight-YDown坐标系中。 官方文档 实际测量 在Metashape软件中量取多张影像的左上角像素的中心和左上角,如图所示: 左上角像素中心点记作point 4,左上角像素左上角点记作point
1137. 选择最佳线路(spfa,超级原点)
1137. 选择最佳线路 - AcWing题库 有一天,琪琪想乘坐公交车去拜访她的一位朋友。 由于琪琪非常容易晕车,所以她想尽快到达朋友家。 现在给定你一张城市交通路线图,上面包含城市的公交站台以及公交线路的具体分布。 已知城市中共包含 n 个车站(编号1~n)以及 m 条公交线路。 每条公交线路都是 单向的,从一个车站出发直接到达另一个车站,两个车站之间可能存在多条公交线路。 琪琪的

fanuc机器人自动程序前怎么回原点,FANUC机器人抓取程序案例
FANUC机器人抓取程序案例 FANUC机器人抓取程序案例 FANUC机器人抓取程序案例 原创 工业机器人辅导员 工业机器人辅导员 2019-07-19 1:TIMER[1]=RESET 2:TIMER[1]=START 3:UTOOL_NUM=1 [工具坐标系1] 4:UFRAME_NUM=1 [用户坐标系1] 5:OVERRIDE=50% [速度50%] 6:D0[101]=OFF [机器
Brother机床原点设定方法
Brother机床原点设定方法 一般在机床提示:电池更换时期(BAT2)提示报警时,就需要尽快更换电池,如果忘记更换电池或停机时间过长等各种原因,就会导致机床的伺服轴原点丢失。如下图报警所示! Brother机床原点设定方法 遇到这种报警就需要对机床进行重设原点,注:重设原点后需要重新确认一下各工件坐标系!针对此报警,今天带‘机友们’简单介绍一下Brother机床原点设定方法: Broth

Blender 围绕自身的原点旋转与游标旋转
默认情况下的旋转是,R后旋转是物体自身的原点旋转 可以修改为围绕游标旋转,通过旋转R时 局部与全局坐标 全局的坐标不会变 局部的会随着物体的旋转变化 如果平稳时G+Z+Z会在全局到局部坐标之间切换 或在局部到全局之间的切换 学习视频:【基础篇】1.3 认识界面_哔哩哔哩_bilibili
C++ 657. 机器人能否返回原点 简单模拟
在二维平面上,有一个机器人从原点 (0, 0) 开始。给出它的移动顺序,判断这个机器人在完成移动后是否在 (0, 0) 处结束。 移动顺序由字符串 moves 表示。字符 move[i] 表示其第 i 次移动。机器人的有效动作有 R(右),L(左),U(上)和 D(下)。 如果机器人在完成所有动作后返回原点,则返回 true。否则,返回 false。 注意:机器人“面朝”的方向无关紧要。 “