本文主要是介绍伺服电机:原点复位,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、原点复位概念
原点复位指的是,在驱动器使能时,触发原点复位功能后,电机将主动查找零点,完成定位功能。
那么问题来了,什么是原点,什么是零点?
原点:即机械原点,可以是原点开关信号,也可以是限位开关的信号。
零点:即定位目标点,可表示为原点+偏移量,当偏移量设置为0时,零点与原点重合。
一个完整的原点复位包括原点回零和电气回零两部分
原点回零
驱动器再接收到原点复位信号后,根据预先设定的机械原点,主动定位电机轴与机械原点的相对位置。
首先亚需要查找原点,然后在原点的基础上移动一段位移到达零点位置。
原点回零通常应用在首次寻找零点的场合。
电气回零
经原点回零操作确定零点位置后,以当前位置为起点,移动一段相对位移。
原点复位完成是指原点回零和电气回零都完成,电机当前的位置与机械原点偏移量一致。
原点复位完成,伺服驱动器输出原点回零信号,上位机收到该信号后可确认原点复位完成。
二、原点回零的操作模式
2.1、正向回原点:减速点、原点为原点开关
电机回原点前,原点开关(原点作为减速点)信号无效,全程未触发正向极限开关
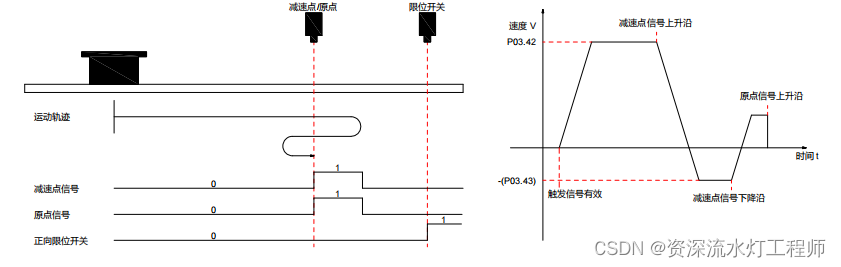
电机首先以设定的高速搜索原点开关信号速度,正向搜索减速点信号;
直到遇到减速点上升沿,按照设定的减速时间常数减速至0后,反向加速至设定的低速;
当搜索到减速点信号下降沿。遇到减速点信号下降沿时减速停机;
之后再以设定的速度继续低速正向搜索减速点上升沿;
正向加速或正向匀速运行中,遇到原点信号上升沿时,立即停机
电机回原点前,原点开关(原点作为减速点)信号有效,全程未触发正向限位开关

电机回原点前,原点开关(原点作为减速点)信号无效,回原点过程触发正向限位开关

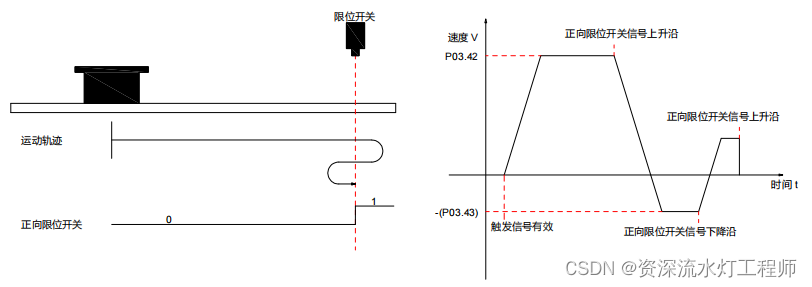
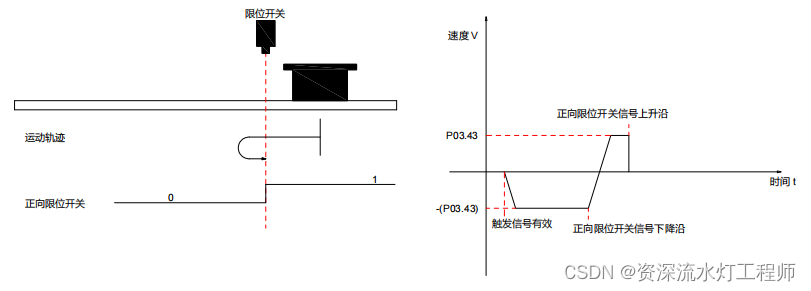
2.2、正向回原点:减速点、原点为正向限位开关
电机回原点前正向限位开关(减速点)信号无效
电机回原点前正向限位开关(减速点)信号有效
2.3、正向回原点:减速点、原点为机械极限位置

三、电气回零
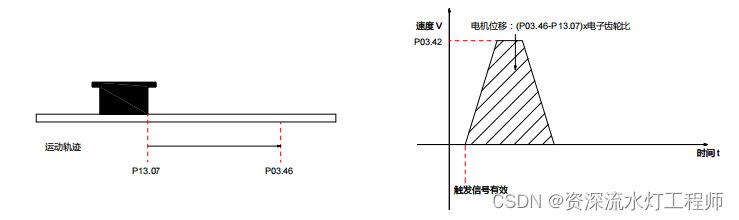
电机经过一次机械回零操作后,系统的机械零点位置已知。此时设定P03.46/P03.47后,可使电机从当前位置移动到指定位置。电气回零模式下,电机全程以P03.42设定值高速运行,运行方向由电机总位移的正负决定,位移指令运行完毕,电机停机。
这篇关于伺服电机:原点复位的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!