卡尔曼专题
带交互的卡尔曼滤滤波|一维滤波|源代码
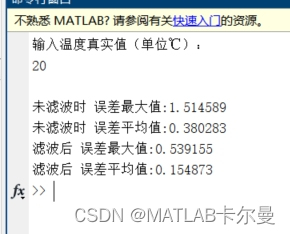
背景 一维卡尔曼滤波的MATLAB例程,背景为温度估计。 代码介绍 运行程序后,可以自己输入温度真实值: 以20℃为例,得到如下的估计值: 滤波前的值和滤波后的值分别于期望值(真实值)作差,可以得到误差曲线图: 误差统计特性 源代码 程序源码下载: https://download.csdn.net/download/callmeup/89389486 更多关

【目标定位】基于matlab扩展卡尔曼算法SLAM(运动轨迹+误差 )【含Matlab源码 1637期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源: 【目标定位】基于matlab扩展卡尔曼算法SLAM(运动轨迹+误差 )【含Matlab源码 1637期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab信号处理(初级版) 备注: 点击上面蓝色字体付费专栏Matlab信号处理(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matl

SOC仿真-无迹卡尔曼UKF在电池荷电状态SOC的仿真应用
在前面得到了AFFRLS参数辨识结果,将动态的辨识参数用于SOC估算,估算方法为无迹卡尔曼滤波算法。刚开始学习不太确定自己的结果是不是正确的话,可以参考一下下面的图形。工况为FUDS工况,结果如下 估计器1为AFFRLS参数下的UKF估算,估计器2为辨识结果取平均值后的估算结果。 误差图: Q或R参数需要调试到合适的数值,曲线有高有低说明UKF有对安时积分法其修正作用。后
35、卡尔曼滤算法的理解和编程实现其基本思想
基本思想:对卡尔曼滤波的算法的学习、理解及其应用; 代表t-1时刻时,小车的位置;代表t时刻时,小车移动的位置代表t-1时刻时,小车的速度;代表t时刻时,小车的速度=t时刻与t-1时刻的时间差 公式一:位移量

算法项目(2)—— LSTM、RNN、GRU(SE注意力)、卡尔曼轨迹预测
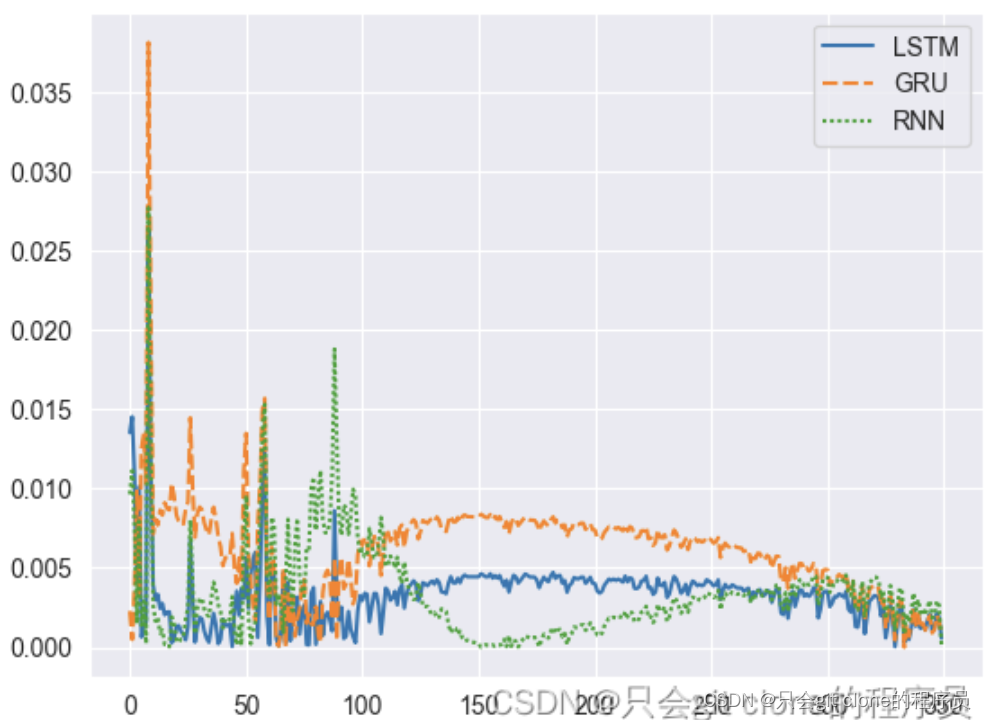
本文包含什么? 项目运行的方式(包教会)项目代码LSTM、RNN、GRU(SE注意力)、卡尔曼四种算法进行轨迹预测.各种效果图运行有问题? csdn上后台随时售后. 项目说明 本文实现了三种深度学习算法加传统算法卡尔曼滤波进行轨迹预测, 预测效果图 首先看下不同模型的指标: 模型RMSELSTM0.002884796078706592LSTM+SE0.00275518011984951
对Kalman(卡尔曼)滤波器的理解
1.简介(Brief Introduction) 在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比
运动模型非线性测量非线性扩展卡尔曼跟踪融合滤波算法(Matlab仿真)
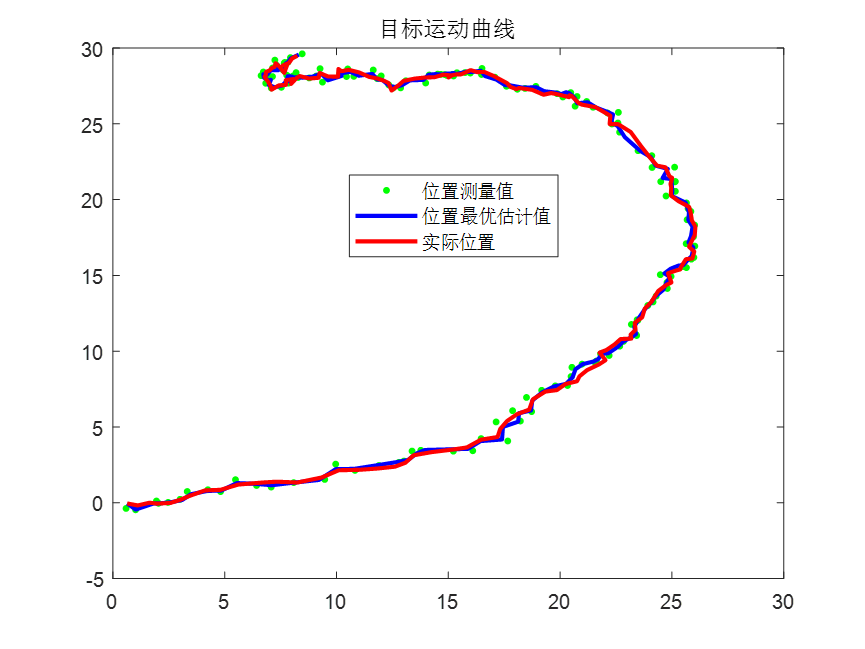
卡尔曼滤波的原理和理论在CSDN已有很多文章,这里不再赘述,仅分享个人的理解和Matlab仿真代码。 之前的博文运动模型非线性扩展卡尔曼跟踪融合滤波算法(Matlab仿真)-CSDN博客使用扩展卡尔曼滤波算法将非线性的运动模型线性化,但测量值仍旧是线性的,不需要雅可比矩阵。这里考虑测量值也为非线性的情况,并用Matlab做仿真。 如果估计值为[x,y
![[ROS] 多传感器卡尔曼融合框架 Ethzasl MSF Framework 编译与使用](https://img-blog.csdnimg.cn/img_convert/4ee8617ecb08ab831e425074feef8ac2.png)
[ROS] 多传感器卡尔曼融合框架 Ethzasl MSF Framework 编译与使用
转载自:http://www.liuxiao.org/2016/07/ros-%E5%A4%9A%E4%BC%A0%E6%84%9F%E5%99%A8%E5%8D%A1%E5%B0%94%E6%9B%BC%E8%9E%8D%E5%90%88%E6%A1%86%E6%9E%B6-ethzasl-msf-framework-%E7%BC%96%E8%AF%91%E4%B8%8E%E4%BD%BF%E7

卡尔曼家族从零解剖-(04)贝叶斯滤波→细节讨论,逻辑梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}

卡尔曼家族从零解剖-(03)贝叶斯滤波→公式推导与示例
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}
卡尔曼家族从零解剖-(00)目录最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}
卡尔曼家族从零解剖-(02)贝叶斯滤波-知其所以然
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}