本文主要是介绍[ROS] 多传感器卡尔曼融合框架 Ethzasl MSF Framework 编译与使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
转载自:http://www.liuxiao.org/2016/07/ros-%E5%A4%9A%E4%BC%A0%E6%84%9F%E5%99%A8%E5%8D%A1%E5%B0%94%E6%9B%BC%E8%9E%8D%E5%90%88%E6%A1%86%E6%9E%B6-ethzasl-msf-framework-%E7%BC%96%E8%AF%91%E4%B8%8E%E4%BD%BF%E7%94%A8/
Home机器人ROS[ROS] 多传感器卡尔曼融合框架 Ethzasl MSF Framework 编译与使用
[ROS] 多传感器卡尔曼融合框架 Ethzasl MSF Framework 编译与使用
2016年7月26日
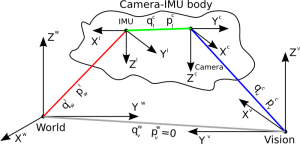
多传感器融合是机器人导航上面一个非常基本的问题,通常在一个稳定可用的机器人系统中,会使用视觉(RGB或RGBD)、激光、IMU、马盘等一系列传感器的数据来最终输出一个稳定和不易丢失的姿态。Ethzasl MSF Framework 是一个机器人上面的多传感器融合框架,它使用了扩展卡尔曼的原理对多传感器进行融合。同时内部使用了很多工程上的 trick 解决多传感器的刷新率同步等问题,API 封装也相对简单,非常适合新手使用。
0、系统环境:
Ubuntu 14.04.3
ROS indigo
1、新建 MSF 工作目录:
在命令行执行如下命令:
mkdir -p MSF/src cd ./MSF/src catkin_init_workspace
| 1 2 3 | mkdir -p MSF/src cd ./MSF/src catkin_init_workspace |
退出 src 目录到 PATH_TO_MSF 根目录下,编译生成 ROS 工程文件:
cd .. catkin_make
| 1 2 | cd .. catkin_make |
后面我们将这个新建的 MSF 路径称为 PATH_TO_MSF。
2、下载依赖库和 Ethzasl MSF Framework:
进入 PATH_TO_MSF/src 目录。
cd ./src
| 1 | cd ./src |
在此目录下载所有依赖库和 MSF 框架。
1)下载 glog:
git clone https://github.com/ethz-asl/glog_catkin.git
| 1 | git clone https://github.com/ethz-asl/glog_catkin.git |
2)下载 catkin_simple:
git clone https://github.com/catkin/catkin_simple.git
| 1 | git clone https://github.com/catkin/catkin_simple.git |
3)下载 asctec_mav_framework:
git clone https://github.com/ethz-asl/asctec_mav_framework.git
| 1 | git clone https://github.com/ethz-asl/asctec_mav_framework.git |
4)最后下载 Ethzasl MSF Framework 框架源代码:
git clone https://github.com/ethz-asl/ethzasl_msf.git
| 1 | git clone https://github.com/ethz-asl/ethzasl_msf.git |
3、编译 ROS 工程:
1)设置环境:
退出 src 目录,进入 PATH_TO_MSF 目录。在命令行中使用如下命令设置当前窗口的编译环境:
cd .. source devel/setup.bash
| 1 2 | cd .. source devel/setup.bash |
2)再次编译整个工程:
catkin_make
| 1 | catkin_make |
中间可能会出现很多 warning,不过最后如果能够 100% 完成 built target 就成功了。
4、运行例子: MSF Viconpos Sensor Framework(使用 ROS Bag):
官方的例子使用了 Vicon 的设备进行 6ROF 的姿态估计,这个传感器很专业,但是我们一般没有。这里面我们使用官方提供的一个 bag 文件来进行模拟。
1)首先从 ros 网站下载 Vicon 的数据集:
这个数据包有 3.8 MB 左右,如果速度慢的可以下载我百度网盘的文件:
http://pan.baidu.com/s/1eShq7lg
我这里将其放置在 PATH_TO_MSF/data 目录下面。
2)修改 src/ethzasl_msf/msf_updates/viconpos_sensor_fix.yaml 文件:
将其中所有的:
/pose_sensor/pose_sensor/
| 1 | /pose_sensor/pose_sensor/ |
替换为:
/msf_viconpos_sensor/pose_sensor/
| 1 | /msf_viconpos_sensor/pose_sensor/ |
找到:
/pose_sensor/core/data_playback: false
| 1 | /pose_sensor/core/data_playback: false |
修改成:
/pose_sensor/core/data_playback: true
| 1 | /pose_sensor/core/data_playback: true |
3)修改 src/ethzasl_msf/msf_updates/launch/viconpos_sensor.launch 文件:
找到:
<rosparam file="$(find msf_updates)/viconpos_sensor_fix.yaml"/>
| 1 | <rosparam file="$(find msf_updates)/viconpos_sensor_fix.yaml"/> |
在这一行的前面加入两行 remap 操作,将传感器的 topic 与引擎的 topic 对应上:
<remap from="/msf_core/imu_state_input" to="/auk/fcu/imu" /> <remap from="msf_updates/transform_input" to="/vicon/auk/auk" />
| 1 2 | <remap from="/msf_core/imu_state_input" to="/auk/fcu/imu" /> <remap from="msf_updates/transform_input" to="/vicon/auk/auk" /> |
找到:
</node>
| 1 | </node> |
在其之后添加(这一步是初始化卡尔曼滤波器的,非常重要):
<node pkg="rosservice" type="rosservice" name="initialize" args="call --wait /msf_viconpos_sensor/pose_sensor/initialize_msf_scale 1"/>
| 1 | <node pkg="rosservice" type="rosservice" name="initialize" args="call --wait /msf_viconpos_sensor/pose_sensor/initialize_msf_scale 1"/> |
4)启动 ros 内核:
在一个窗口打开 roscore:
roscore
| 1 | roscore |
5)启动 MSF pose_sensor 节点:
快捷键 Ctrl + Alt + T 新建窗口,在 PATH_TO_MSF 目录下执行如下命令打开 pose_sensor 节点:
source devel/setup.bash roslaunch msf_updates viconpos_sensor.launch
| 1 2 | source devel/setup.bash roslaunch msf_updates viconpos_sensor.launch |
6)打开动态配置参数功能(可选):
快捷键 Ctrl + Alt + T 新建窗口,执行如下命令打开动态配置功能:
rosrun rqt_reconfigure rqt_reconfigure
| 1 | rosrun rqt_reconfigure rqt_reconfigure |
可以看到如下窗口,在窗口中选中 msf_viconpos_sensor 下面菜单: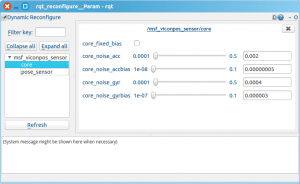
在菜单中即可动态设置参数。
7)播放 vicon 的 bag 文件:
快捷键 Ctrl + Alt + T 新建窗口,在 PATH_TO_MSF 目录下执行如下命令:
rosbag play data/dataset.bag --pause -s 25
| 1 | rosbag play data/dataset.bag --pause -s 25 |
这一行命令是暂停并从第 25s 后开始播放 bag 文件,文档中说这是为了等待 MAV 硬件系统站稳并处于非观察模式(不理解)。
总之,如果你准备好运行了,就可以开始点击空格键进行数据播放了,播放的数据大约剩余 86s 左右。
切换到 MSF pose_sensor 节点的窗口,如果你看到输出类似如下的窗口,就是表示系统运行成功了: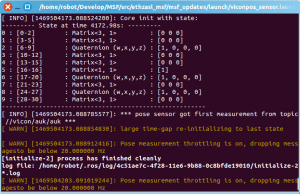
5、数据模拟:
刚才跑成功了数据融合节点,但是并没有任何可视化的输出可以给我们看到。ethzasl msf 提供了一些脚本来进行数据模拟的功能,可以让我们更直观地看到结果。
1)修改 src/ethzasl_msf/msf_core/scripts/plot_relevant 文件:
找到:
rxplot msf_core/state_out/data[0]:data[1]:data[2] msf_core/state_out/data[3]:data[4]:data[5] -b $T -t "position & velocity" -l px,py,pz,vx,vy,vz & rxplot msf_core/state_out/data[13]:data[14]:data[15] msf_core/state_out/data[16] -b $T -t "acc bias & scale" -l x,y,z,L
| 1 2 | rxplot msf_core/state_out/data[0]:data[1]:data[2] msf_core/state_out/data[3]:data[4]:data[5] -b $T -t "position & velocity" -l px,py,pz,vx,vy,vz & rxplot msf_core/state_out/data[13]:data[14]:data[15] msf_core/state_out/data[16] -b $T -t "acc bias & scale" -l x,y,z,L |
修改成:
rqt_plot msf_core/state_out/data[0]:data[1]:data[2] # rxplot msf_core/state_out/data[0]:data[1]:data[2] msf_core/state_out/data[3]:data[4]:data[5] -b $T -t "position & velocity" -l px,py,pz,vx,vy,vz & # rxplot msf_core/state_out/data[13]:data[14]:data[15] msf_core/state_out/data[16] -b $T -t "acc bias & scale" -l x,y,z,L
| 1 2 3 | rqt_plot msf_core/state_out/data[0]:data[1]:data[2] # rxplot msf_core/state_out/data[0]:data[1]:data[2] msf_core/state_out/data[3]:data[4]:data[5] -b $T -t "position & velocity" -l px,py,pz,vx,vy,vz & # rxplot msf_core/state_out/data[13]:data[14]:data[15] msf_core/state_out/data[16] -b $T -t "acc bias & scale" -l x,y,z,L |
2)启动 plot_relevant 脚本:
快捷键 Ctrl + Alt + T 新建窗口,在 PATH_TO_MSF 目录下执行如下命令打开 plot_relevant 脚本:
source devel/setup.bash rosrun msf_core plot_relevant
| 1 2 | source devel/setup.bash rosrun msf_core plot_relevant |
另外也可以直接在命令行运行:
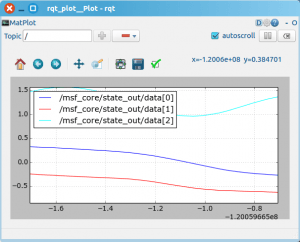
rqt_plot msf_core/state_out/data[0]:data[1]:data[2]
| 1 | rqt_plot msf_core/state_out/data[0]:data[1]:data[2] |
如果一切正常,即可看到如下曲线绘制,这样就表示成功运行起来了:
参考文献:
[1] http://wiki.ros.org/ethzasl_sensor_fusion/Tutorials/Introductory%20Tutorial%20for%20Multi-Sensor%20Fusion%20Framework
这篇关于[ROS] 多传感器卡尔曼融合框架 Ethzasl MSF Framework 编译与使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






