动作专题

用Unity2D制作一个人物,实现移动、跳起、人物静止和动起来时的动画:中(人物移动、跳起、静止动作)
上回我们学到创建一个地形和一个人物,今天我们实现一下人物实现移动和跳起,依次点击,我们准备创建一个C#文件 创建好我们点击进去,就会跳转到我们的Vision Studio,然后输入这些代码 using UnityEngine;public class Move : MonoBehaviour // 定义一个名为Move的类,继承自MonoBehaviour{private Rigidbo

jsp技术(内置对象,动作标签,指令)
一、 九大对象: 内置对象(又叫隐含对象,有9个内置对象):不需要预先声明就可以在脚本代码和表达式中随意使用 1-out: javax.servlet.jsp.JspWriter类型,代表输出流的对象。作用域为page(页面执行期) request:javax.servlet.ServletRequest的子类型,此对象封装了由WEB浏览器或其它客户端生成地HTTP

Unity3D ARPG(动作角色扮演游戏)设计与实现详解
动作角色扮演游戏(Action Role-Playing Game, ARPG)结合了传统角色扮演游戏(RPG)的深度与动作游戏(Action Game)的即时反应和流畅战斗体验。Unity3D 作为一款强大的跨平台游戏开发引擎,为开发者提供了丰富的工具和资源来创建高质量的 ARPG 游戏。本文将详细介绍如何使用 Unity3D 设计和实现一个基本的 ARPG 游戏,包括技术选型、游戏架构、关键系

用于基于骨架的动作识别的空间时间图卷积网络 ST-GCN (代码+数据集+模型)
简介 本仓库包含论文《用于基于骨架的动作识别的空间时间图卷积网络》的相关代码、数据集和模型。 ST-GCN 动作识别演示 我们的基于骨架的动作识别演示展示了ST-GCN如何从人体骨架中提取局部模式和关联性。下图显示了我们ST-GCN最后一层中每个节点的神经响应幅度。 触摸头部 坐下 脱鞋 进食 投踢他人 掷锤 清洁与抓举 拉力器 太极拳 抛球 上一行结果来自NTU-RGB+D数据集,第

14、Django Admin的“Action(动作)”中添加额外操作
如图红框增加操作 将以下代码添加到HeroAdmin类中 actions = ["mark_immortal"]def mark_immortal(self, request, queryset):queryset.update(is_immortal=True) 修改后完整代码如下: @admin.register(Hero)class HeroAdmin(admin.Model

Kevin‘s notes about Qt---Episode 4 多次点击按钮反复执行机械臂动作
原先版本 SDK 1.2.1 - 2020-04-02 HMI 界面 4.0.6.135135 控制器 1.7.5 升级程序 0.6.4 伺服版本 不详(似乎也并不重要) 前言 在之前的工作中,这个问题并没有得到有效解决,情况如下: 在之前版本的程序中,每次动作执行完后需要关闭Qt界面,下一次想要运行机械臂程序时,就算没有改动程序,也需要再次点击编译运行,可以正常运行
JAVAWEB开发之Session的追踪创建和销毁、JSP详解(指令,标签,内置对象,动作即转发和包含)、JavaBean及内省技术以及EL表达式获取内容的使用
Session的追踪技术 已知Session是利用cookie机制的服务器端技术,当客户端第一次访问资源时 如果调用request.getSession() 就会在服务器端创建一个由浏览器独享的session空间,并分配一个唯一且名称为JSESSIONID的cookie发送到浏览器端,如果浏览器没有禁用cookie的话,当浏览器再次访问项目中的Servlet程序时会将JSESSIONID带着

搜维尔科技:Manus VR高精度手部动作捕捉数据手套为人形机器人、人工智能和人机交互赋能
Manus Quantum数据手套能够提供实时端到端的手部动作数据流与高精度数据集,助力人形机器人实现快速发展。 Quantum量子数据手套采用毫米级精度的磁性指尖跟踪传感器,融入尖端的EMF磁性定位追踪技术,无漂移,能提供高度准确且可靠的手指动作捕捉数据,为人形机器人、人工智能和机器学习赋能。 Manus是一家专注于开发高精度创新型人机交互设备的高科技公司,致力于手指跟踪技术的研究与开发,旨

构建基于I2C与UART通信的智能嵌入式机械臂抓取系统,结合OpenCV技术进行高效物体识别与动作控制的综合解决方案(代码示例)
在现代工业和智能家居中,智能抓取系统的需求日益增长。本项目旨在设计一个能够识别和抓取不同形状和尺寸物体的机械臂。通过视觉识别、夹爪控制和嵌入式系统集成,智能抓取系统能够大幅提升物体处理的效率和准确性。 项目目标与用途 本项目的主要目标是开发一个智能机械臂,能够在复杂环境中自动识别并抓取各种物体。该系统可广泛应用于生产线自动化、仓储管理、智能家居等领域。 解决的问题与价值 传统的物体抓取方式
JSP的三大指令 七大动作 九大对象
一、三大指令: 1、page: 该指令是针对当前页面的指令。 2、include: 用于指定如何包含另一个页面。 3、tablib: 用于定义和访问自定义标签。 二、七大动作: 1、forward: 执行页面转向,将请求的处理转发到下一个页面。 2、param: 用于传递参数,必须与其他支持参数曲标签一起使用。 3、inclu

使用深度学习来进行击剑动作识别的裁判工作
在击剑比赛中,当双方几乎同时击中对方时,记分板两边都会亮起。这时裁判需要决定哪一方得分。一般而言,谁更主动或控制了局势就会得分。我尝试训练了一个模型来辅助裁判做这样的判断!目前该模型在花剑测试集上的准确率大约为60%,相比随机选择(左、右或无得分)的33%有了提升。接下来我将对佩剑数据进行测试。(在重剑比赛中,双方同时击中则双方都得分。) 这里有几个主要挑战,首要的是缺乏标注过的击剑视频数据

JSP三大指令,九大内置对象,JSP动作标签,EL表达式与函数库
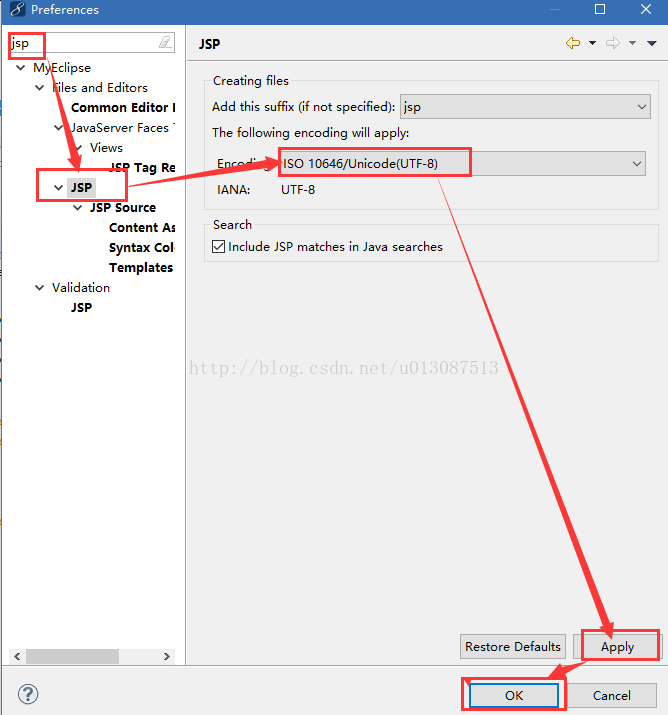
JSP三大指令 ---------------------------------------------- 一个jsp页面中,可以有0~N个指令的定义! 1. page --> 最复杂:格式:<%@page language="java" info="xxx"...%> * pageEncoding和contentType: > pageEncoding:

特斯拉Optimus机器人探秘:高薪 “动作捕捉” 岗位,时薪 48 美金
特斯拉Optimus机器人探秘:高薪 “动作捕捉” 岗位,时薪 48 美金 “ The company is paying people to train its humanoid Optimus bot via motion capture, but the task may require vast amounts of data.” 目前,特斯拉正招动作演员“数据收集
泛微E9 自定义接口动作 加班单写入HR系统
第一步:写一个JAVA类,继承 weaver.interfaces.workflow.action 这个包; 第二步:编码相关逻辑业务代码,代码如下: package weaver.interfaces.workflow.action;import org.apache.commons.logging.Log;import org.apache.commons.logging.LogFacto
![基于cocos2dx的飞机大战学习[三]-为英雄添加飞行帧动作并控制飞机移动](https://img-blog.csdn.net/20150716212904474?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQv/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center)
基于cocos2dx的飞机大战学习[三]-为英雄添加飞行帧动作并控制飞机移动
第三节:为英雄添加飞行帧动作并控制飞机移动 一、为飞机添加飞行动画 为飞机添加飞行动画十分简单,只需要在FlyPlane::init()函数中创建一个动画对象,在里面添加两张英雄图并相互切换就可以了。 添加代码如下: //为英雄添加飞行动作,动作由动画组成,所以得到动作对象前,需要先得到动画对象//一、创建动画对象//1.1通过create得到动画对象auto ani

【游戏开发】【Unity】如何快速建造人物模型并赋予动画动作
背景 之前介绍了简单将模型从Vroid Studio置入Blender的方法,本篇介绍如何快速将Vroid的模型赋予动画动作。 工艺流程 大致的路线就是用Vroid快速建模,从Maximo上导入骨架动作,最后用Blender将两者结合。 操作方法 在Blender中打开Edit-》Preferences-》Add-ons 搜索关键字带VRM的插件,安装VRM-Addon-for-Be
systemd在程序被kill -9时的动作
现象 今天在测试程序的时候发现,使用kill -9杀死程序之后,程序的资源回收动作依旧被执行了。 分析 执行 kill -9 abc,然后立即再执行ps -ef | grep abc,发现此时多了一个父进程为1的进程,正在执行abc service中定义的ExecStop命令,而这个命令正是资源回收动作的执行者。 推测这是systemd的杰作,所以在redhat6上用service管理的系统

具身智能的视觉-语言-动作模型综合综述论文
近期arXiv公开了关于具身智能(Embodied AI)中的视觉-语言-动作模型(Vision-Language-Action Models,简称VLAs)的综合综述论文。介绍了VLAs的概念,它们是为了处理多模态输入而设计的模型,包括视觉、语言和动作模态。这些模型对于具身AI至关重要,因为它们需要理解和执行指令、感知环境并生成适当的动作。 文章讨论了单模态模型的发展,包括计算机视觉、自然语言
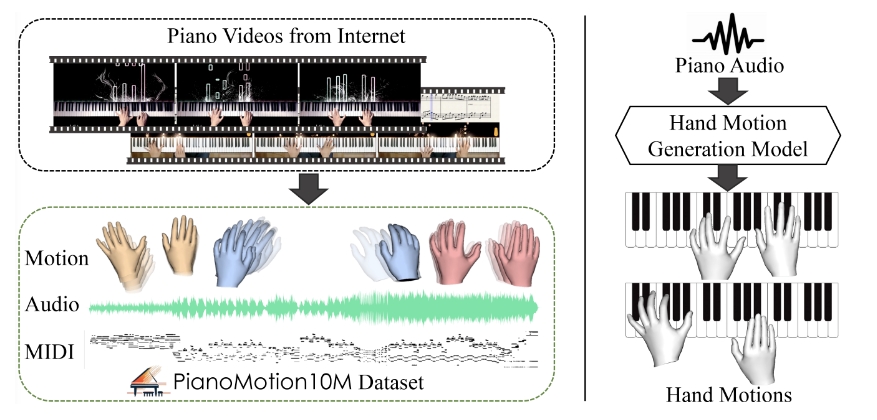
开源的代码语言模型DeepSeek-Coder-V2;Runway推出Gen-3;多层架构整合多个大语言模型;大规模钢琴手部动作数据集和基准
✨ 1: DeepSeek-Coder-V2 开源的多专家代码语言模型,支持338种编程语言。 DeepSeek-Coder-V2 是一个开源的代码语言模型,专为代码生成、代码补全、代码修复以及数学推理等任务而设计。该模型通过在大量高质量的多源语料库上进一步训练,显著提升了其在代码生成和数学推理方面的能力,同时在一般语言任务中的表现也保持在同等水平。DeepSeek-Coder-V2
第20课 用声音控制小猫动作
第20课 用声音控制小猫动作 【教材分析】 本课主要的学习任务是用音量值控制小猫的运动,其涉及的知识点有:认识音量值控件,用数值与逻辑运算来表达音量值的范围,以及用多个“如果...”控件来实现不同条件下做不同的事。其中的感知分支语句含义,对小学生来讲不易理解,因此在教学中应注重体验。根据本课的教学目标可将教学内容分成三部分,第一部分感知在Scratch中可通过声音来控制动画的特点;第二部分是学
【Spine学习11】之 战士攻击动作 思路总结(手动调整贝塞尔曲线实现前快后慢)
拿到一份psd文件先观察检查一下图片顺序有没有问题, 重点看一下人物的腿部分层,(如果是大小腿分开画的就网格可打可不打,如果是连在一起画的,那必须打网格) 拿着剑的时候剑和手的层级有没有错位, 有错位调整好一下位置: 筛选-插槽-拖拽这个插槽:更改图片顺序 攻击动作组成部分: 第一步: 导入文件 打开PSD文件-用脚本输出json文件和images文件夹 打开spine 导入数据 选择对应j
THUMOS14数据集动作类别
THUMOS14总共二十个动作类别,让GPT-4翻译下 这是一组运动类别和它们在字典中的索引值。这些运动类别的中文翻译如下:BaseballPitch: 棒球投球BasketballDunk: 篮球扣篮Billiards: 台球CleanAndJerk: 举重(挺举)CliffDiving: 悬崖跳水CricketBowling: 板球投球CricketShot: 板球击球Divi

cocos2d-x库的动作(Action)
从本章开始,我们开始讲解cocos2d-x库的动作(Action)。游戏的世界是一个动态的世界:无论是主角精灵还是NPC精灵都处于不断的运动当中,甚至是背景中漂流的树叶,随风而动的小草。这些明显的或者不明显的运动构成了我们栩栩如生的游戏世界。 仔细研究游戏中精灵的运动,我们发现:所有这样的运动都可以细分为若干个基本动作和基本动作的组合。通过进一步扩展,我们可以将同一精灵的更多动作和不同精灵之间的

Ps:管理动作和动作组
◆ ◆ ◆ 管理动作 管理“动作” Actions面板中的动作以使其具有条理性,并仅提供项目所需的动作,可以重新排列、复制、删除、重命名和更改动作选项等。 1、重新排列动作中的命令 在“动作”面板中,将命令拖动到同一动作中或另一动作中的新位置。当突出显示行出现在所需的位置时,松开鼠标按钮。 可使用 Ctrl + Z 键撤销操作。 2、复制动作、命令或组 按住 Alt 键并将动作或命令拖动到“

【Spine学习07】之跑步动作制作思路总结
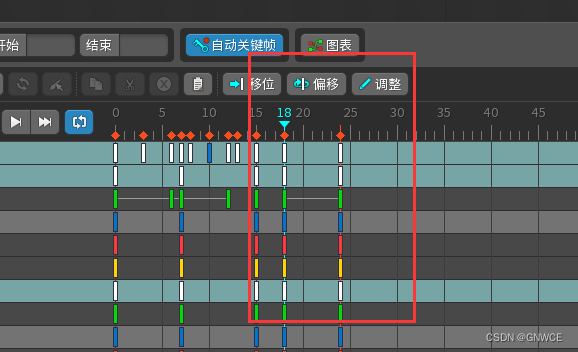
前几节试着做了待机和走路动画 现在开始尝试做跑步动作 注意跑步动作和走路一样 暂时不需要使用IK约束但是会用到塞贝尔曲线(模拟裙子飞起动效) 第一步: 先将人物整体斜放置(因为人跑步的时候,身体前倾) 第二步: 确定频率,跑步动作时间间隔短一点 大概3秒钟一次,总共18秒钟 第三步 开始K第0点的帧: 跑步姿势参考:0s 3s: 6s 9s 12s 15s 把四肢按图上位置摆

【Spine学习06】之IK约束绑定,制作人物待机动画,图表塞贝尔曲线优化动作
引入IK约束的概念: 约束目标=父级 被约束骨骼=子集 这样理解更好,约束目标可以控制被约束的两个骨骼运作 IK约束绑定过程中呢,如果直接绑定最下面的脚掌骨骼会发生偏移,所以在开始处理IK之前,需要先设置一个ROOT结点下的本地骨骼。 听不懂直接看实操: 第一步: 新建一个本地骨骼 第二步: 将第一步新建好的骨骼拖动到ROOT结点上 第三步: 绑定IK 选择骨骼-点击下方新建按钮,选择IK约