本文主要是介绍具身智能的视觉-语言-动作模型综合综述论文,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
近期arXiv公开了关于具身智能(Embodied AI)中的视觉-语言-动作模型(Vision-Language-Action Models,简称VLAs)的综合综述论文。介绍了VLAs的概念,它们是为了处理多模态输入而设计的模型,包括视觉、语言和动作模态。这些模型对于具身AI至关重要,因为它们需要理解和执行指令、感知环境并生成适当的动作。
文章讨论了单模态模型的发展,包括计算机视觉、自然语言处理和强化学习中的里程碑模型。强调了多模态模型的出现,这些模型结合了单模态模型的进展,以处理如视觉问答、图像描述和语音识别等任务。
详细介绍了VLA模型的不同组件,包括预训练的视觉表示、动态学习、世界模型和控制策略。讨论了VLA模型的分类,包括基于预训练的模型、基于Transformer的模型和基于大型语言模型(LLM)的模型。探讨了高级任务规划器,这些规划器能够将长期任务分解为可执行的子任务。
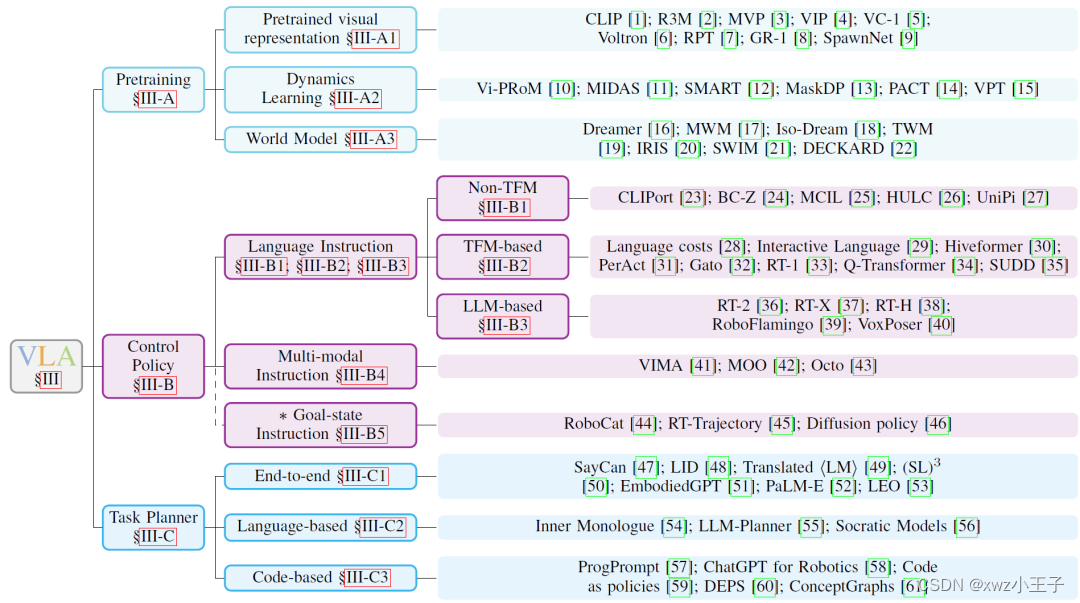
虽然目前还没有专门针对VLAs的综述,但相关领域的现有综述为VLA研究提供了有价值的见解。提供了对新兴VLA模型的全面回顾,涵盖了架构、训练目标和机器人任务等多个方面。提出了一个包括预训练、控制策略和任务规划器三个主要组成部分的层次结构分类法。提供了训练和评估VLA模型所需的资源概述,包括最近引入的数据集和模拟器。

概述了当前的挑战和未来的机遇,如解决数据稀缺问题、提高机器人的灵活性、实现跨不同任务、环境和体现的泛化,以及提高机器人安全性。

讨论了收集真实世界机器人数据的挑战,以及模拟环境作为数据收集过程的替代方法的优势和局限性。深入探讨了VLA模型面临的挑战,包括机器人数据的稀缺性、运动规划、实时响应性、多模态整合、对未见情景的泛化、长期任务执行、基础模型的探索、基准测试和安全性考虑。
论文总结了VLA策略在使具身AI与周围世界有效互动方面的潜力,并强调了需要进一步研究以解决当前存在的挑战。这篇综述论文为VLA领域提供了一个全面的视角,包括其发展、当前状态、挑战和未来的发展机会。
这篇关于具身智能的视觉-语言-动作模型综合综述论文的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








