八叉树专题

PCL 基于八叉树获取体素邻居
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 基于一个指定的体素,通过八叉树获取该体素周围的体素点云。 二、实现代码 //标准文件#include <iostream>#include <thread>//PCL#include <pcl/common/common.h>#include
KD-Trees(K-dimensional树)和Octrees(八叉树
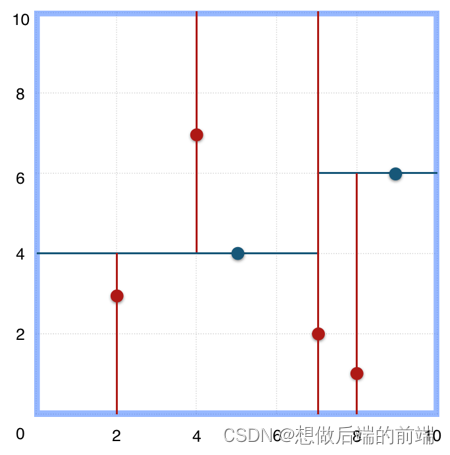
KD-Trees(K-dimensional树)和Octrees(八叉树)是两种常用的数据结构,它们在多维空间中用于高效地存储和查询数据。这两种结构在计算机科学中有着广泛的应用,尤其是在图形学、机器人学、空间索引和最近邻搜索等领域。 KD-Trees KD-Trees是一种二叉树结构,用于组织K维空间中的点。在KD-Trees中,每个节点代表一个K维空间中的点,并且树是通过递归地将空间分割成两
CCCorelib 八叉树邻域点查询(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 这里使用CloudCompare特有的八叉树结构实现对指定范围内邻域点集的查询,其操作类似于PCL中八叉树的操作。 二、实现代码 // CloudCompare#include <CCCoreLib/PointCloudTpl.h>#include <CCCoreLib/GenericIndexedCl

7、octomap_sever安装及demo、自己的pcd点云数据测试,基于八叉树的三维的栅格地图构建
octomap_sever安装及demo、自己的pcd点云数据测试 基于八叉树的三维的栅格地图构建 文章开头先贴一下:高博关于八叉树的博客 1.编译octomap 新建一个目录用于拷贝octomap代码。 如果没有git请安装git,然后拷贝代码: sudo apt-get install gitgit clone https://github.com/OctoMap/octomap

点云地图转换成八叉树地图的流程
主要介绍点云地图转换成八叉树地图的流程 将点云数据转换为八叉树结构的地图通常涉及以下步骤: 1. 定义根节点: 首先定义一个大的立方体节点作为八叉树的根节点,这个立方体需要足够大,以便包含所有的点云数据。 2.空间划分: 将根节点立方体分解成8个相等的小立方体,这些立方体成为根节点的子节点。这是一个递归的过程,每个子节点如果还包含不止一个点云数据,那么继续将其分解成更小的8个立方体,以此
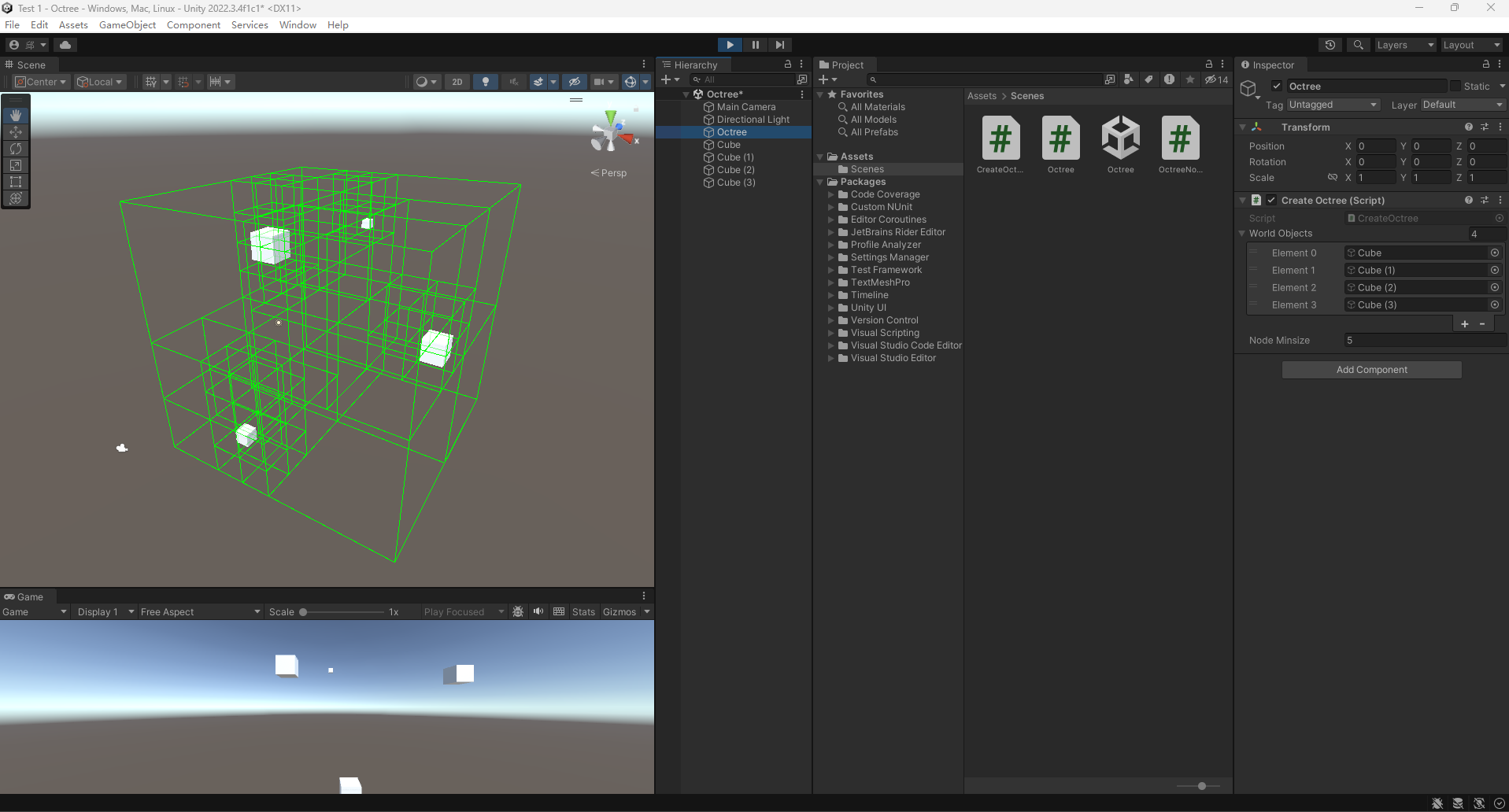
Unity——八叉树的原理与实现
八叉树原理 八叉树(Octree)是一种用于在三维空间中进行空间分割的数据结构。它将三维空间递归地划分为八个子空间,每个子空间对应于一个八叉树节点。这种分割方式可以有效地组织和管理场景中的对象,提高检索效率,特别是在进行空间查询时。 以下是八叉树的基本原理: 空间划分: 初始状态:整个三维空间被表示为一个根节点,该节点包含所有的对象。递归划分:根节点被递归地划分为八个子节点,每个子节点
空间数据结构(四叉树、八叉树、BVH树、BSP树、k-d树)
一. 前言 在游戏程序中,利用空间数据结构加速计算往往是非常重要的优化思想,空间数据结构可以应用于场景管理、渲染、物理、游戏逻辑等方面。 二、多叉树 2.1 四叉树 四叉树是很常见的一种 2D 碰撞检测方法,实现手段也五花八门。不过在具体实现中要注意优化细节,控制建树时间消耗与建树空间大小,特别是在 JS 语言环境下。但四叉树的射线检测、区域检测效率比较高,树更新很快,会产生物体多次划
Open3D 从体素网格构建八叉树(14)
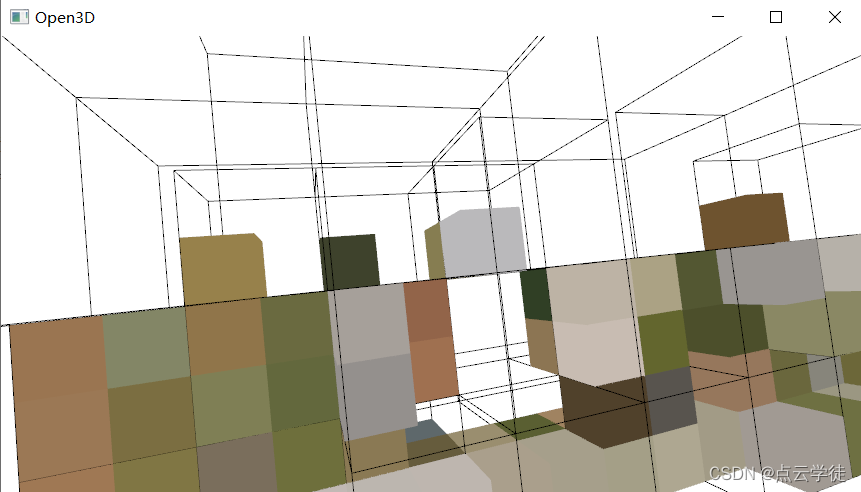
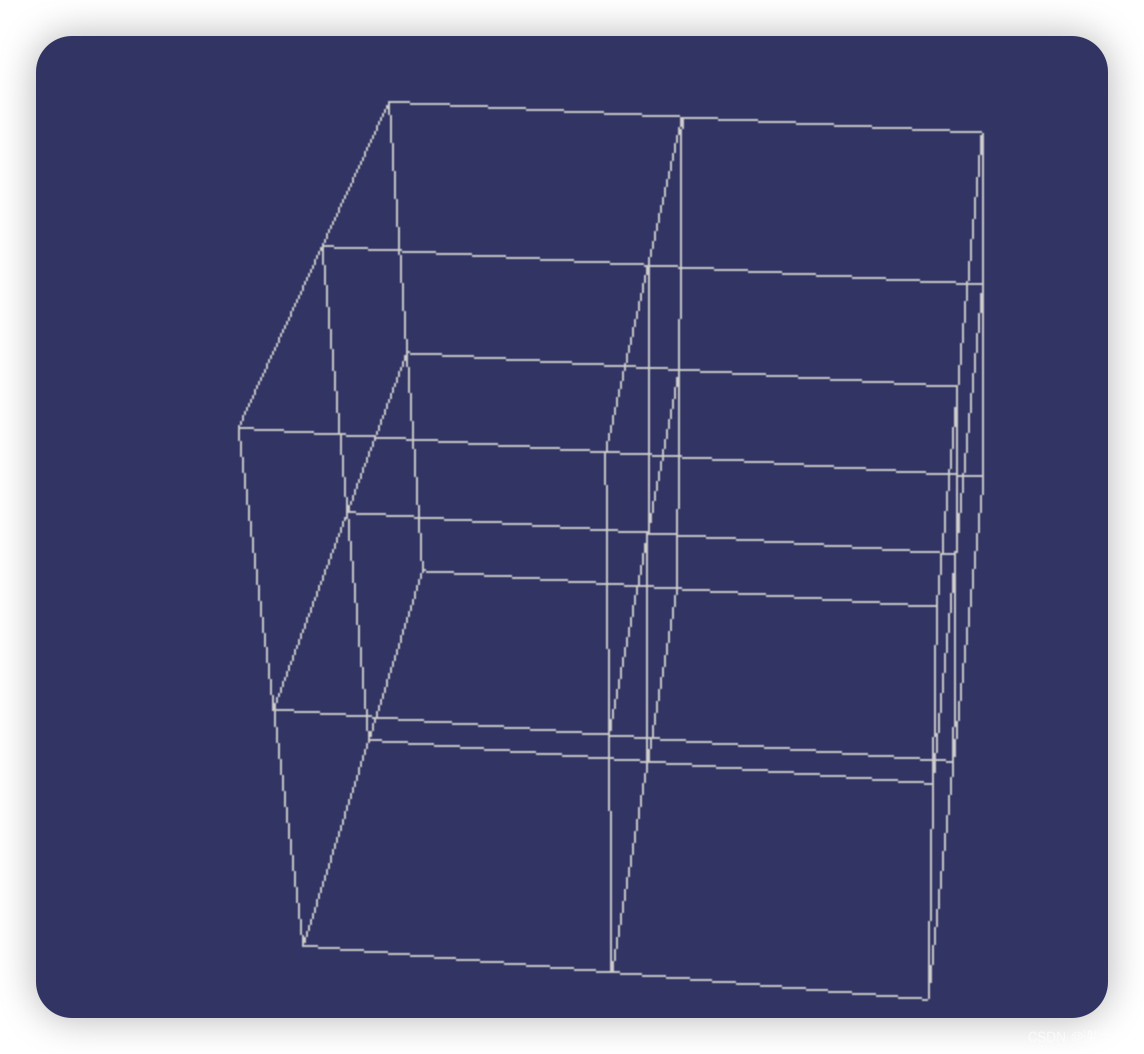
Open3D 从体素网格构建八叉树(14) 一、算法简介二、算法实现1.代码2.效果 一、算法简介 上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。 二、算法实现 1.代码 代码如下(示例): import open3d as o3dimport numpy as np# 构建点云对象pcd =

Open3D 从点云构建八叉树(13)
Open3D 从点云构建八叉树(13) 一、什么是八叉树二、构建方法三、实际作用四、算法实现1.代码2.可视化显示 一、什么是八叉树 八叉树(Octree) 是什么: 八叉树(Octree)是一种树形数据结构,通常用于对三维空间进行分割和组织。它将空间递归地划分为立方体的8个子块,每个子块可以进一步划分为8个子块,以此类推。这样的划分方式使得八叉树能够高效地表示空间中的对象及其

计算机视觉 基于Open3D了解用于网格和点云邻域分析的KD树和八叉树
一、简述 距离计算和邻域分析是理解网格和点云的形状、结构和特征的重要工具。我们这里要基于一些3D库来提取基于距离的信息并将其可视化。 与深度图或体素相比,点云和网格表示 3D 空间中的非结构化数据。点由它们的 (X, Y, Z) 坐标表示,在 3D 空间中可能彼此靠近的两个点在数组表示中可能很远。与2d图像中的相同问题相比,理解某个点的邻域并不是一项简单的任
CGAL的四叉树、八叉树、正交树
四叉树(Quadtree):四叉树是一种用于二维空间分割的数据结构。它将一个二维区域划分为四个象限,每个象限进一步细分为四个小块,以此类推。四叉树可以用于空间索引、图形学、地理信息系统(GIS)等领域。 八叉树(Octree):八叉树是四叉树的扩展,用于三维空间分割。它将一个三维区域划分为八个象限,每个象限进一步细分为八个小的三维体,以此类推。八叉树广泛应用于计算
干货分享:游戏场景管理的八叉树算法解析
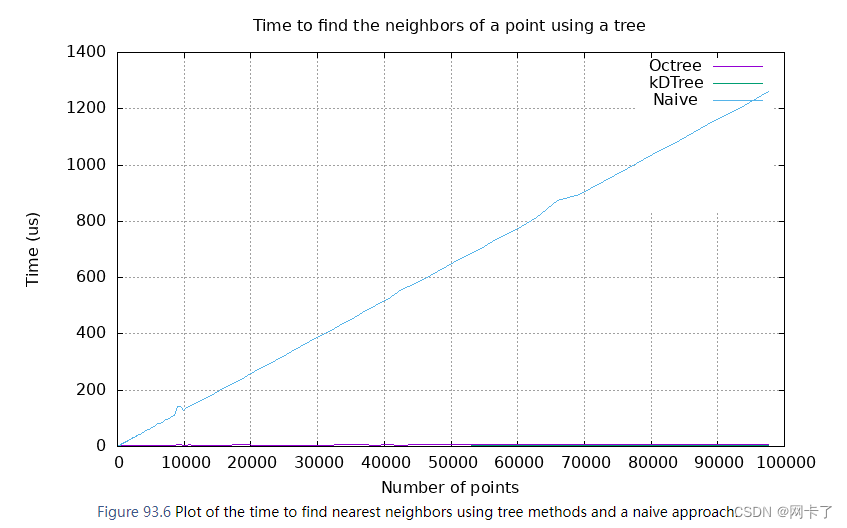
转自:https://www.gameres.com/665565.html 八叉树(octree)是三维空间划分的数据结构之一,它用于加速空间查询,例如在游戏中:1.加速用于可见性判断的视锥裁剪(view frustum culling)。2.加速射线投射(ray casting) ,如用作视线判断或枪击判定。3.邻近查询(proximity query),如查询玩家角色某半径范围内的敌
2D栅格-3D八叉树地图及其概率更新
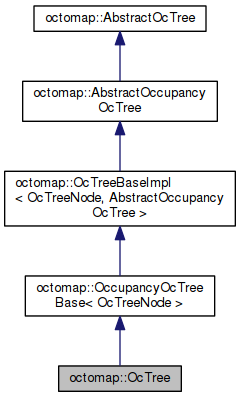
2D栅格-3D八叉树地图及其概率更新 一.栅格/体素概率更新1.占据栅格地图1.1概率更新公式1.2 二维坐标系到栅格索引的转化 2.八叉树地图2.1八叉树原理2.2概率更新公式 二.八叉树工程解析1.Octomap基本数据类型解析octomap::Vector3octomap::OcTreeNodeoctomap::OcTreeKeyoctomap::KeySetoctomap::Key
osg 八叉树可视化
目录 什么是八叉树 八叉树算法过程 八叉树的计算原理 八叉树c++实现 使用osg可视化八叉树 什么是八叉树 在描述三维场景的过程中常常用到一种名为八叉树的数据结构。描述三维空间的八叉树和描述二维空间的四叉树有相似之处,二维空间中正方形可以被分为四个相同形状的正方形,而三维空间中正方体可以被分为八个形状相同的正方体。 八叉树的每个结点表示一个正方体的体积元素,每一个结点有八

PCL:八叉树(Octree)实现点云体素内近邻搜索
1 八叉树 Octree 八叉树(Octree)结构是由 Hunter 博士于1978年首次提出的一种数据模型。八叉树结构通过对三维空间的几何实体进行体元剖分,每个体元具有相同的时间和空间复杂度,通过循环递归的划分方法对三维空间的几何对象进行剖分,从而构成一个具有根节点的方向图。在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成一个叶节点;否则继续对该体元剖分成8个子立方体,依次递剖分,
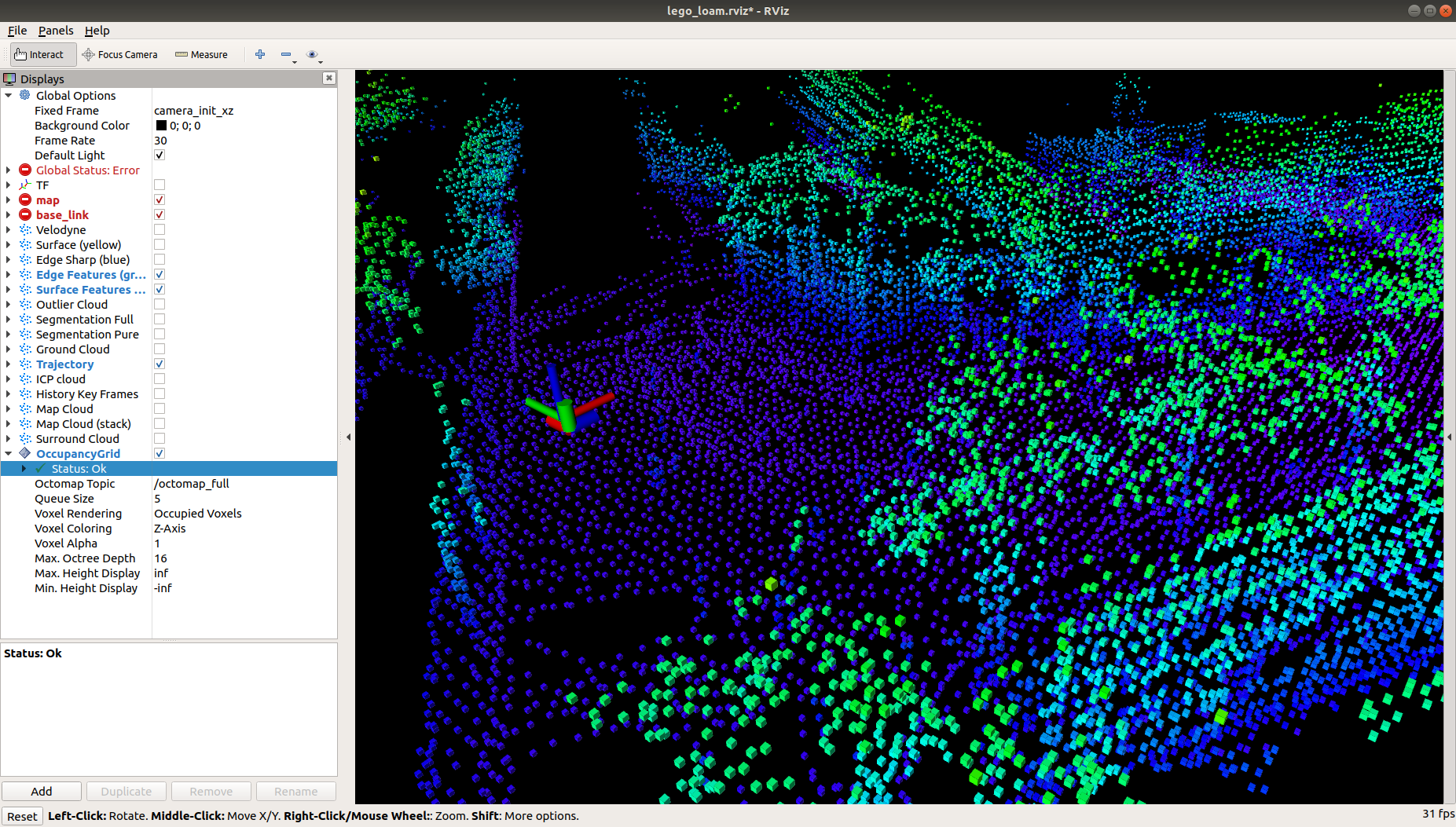
rviz中显示的点云与网格垂直,将保存的pcd文件转为点云在rviz中显示,并使用octomap_server将点云地图转化为八叉树地图和占据栅格地图
文章目录 问题:点云与网格垂直背景解决方法:对点云坐标做变换,绕x轴旋转90度,将z轴指向上方将pcd转成点云,在RVIZ中显示点云图创建launch rviz显示 问题:点云与网格垂直 用lego-loam建图时用rosbag录制相关点云的话题,建图结束后用rosbag play将.bag包在rviz中显示,但是由于该话题的点云发布的frame_id=/camera_ini