代价专题

✨机器学习笔记(二)—— 线性回归、代价函数、梯度下降
1️⃣线性回归(linear regression) f w , b ( x ) = w x + b f_{w,b}(x) = wx + b fw,b(x)=wx+b 🎈A linear regression model predicting house prices: 如图是机器学习通过监督学习运用线性回归模型来预测房价的例子,当房屋大小为1250 f e e t 2 feet^

从MySQL 5.6升级到8.0,Facebook付出了惨痛代价……
点击上方“朱小厮的博客”,选择“设为星标” 后台回复"书",获取 后台回复“k8s”,可领取k8s资料 Facebook 称,他们最近的一次大版本升级到 MySQL 5.6 花了一年多时间才完成,还在 5.6 版上开发 LSM 树存储引擎,MyRocks。在升级到 5.7 的同时构建一个新的存储引擎,会大大减慢 MyRocks 的进度,因此我们选择继续使用 5.6,直到 MyRocks 完成,M

算法之路--最小代价生成树
前言 一个无向连通图的生成树是极小连通子图 这句话是在我学习算法设计的时候看到的,当时学了很多什么无向连同有向连同的,具体的我也记不清了,记得上次说要整理算法模块的,一直没时间整理,心想行动才是最有效的办法。整理得出一句话:一棵生成树的代价是树中各条边上的代价之和且是最小。 贪心法 求一个带权无向图的最小代价生成树问题是一个最优化问题,一个无向图有多颗不同的生成树,一个无向图的所有生

C++ 字符串编辑距离代价计算
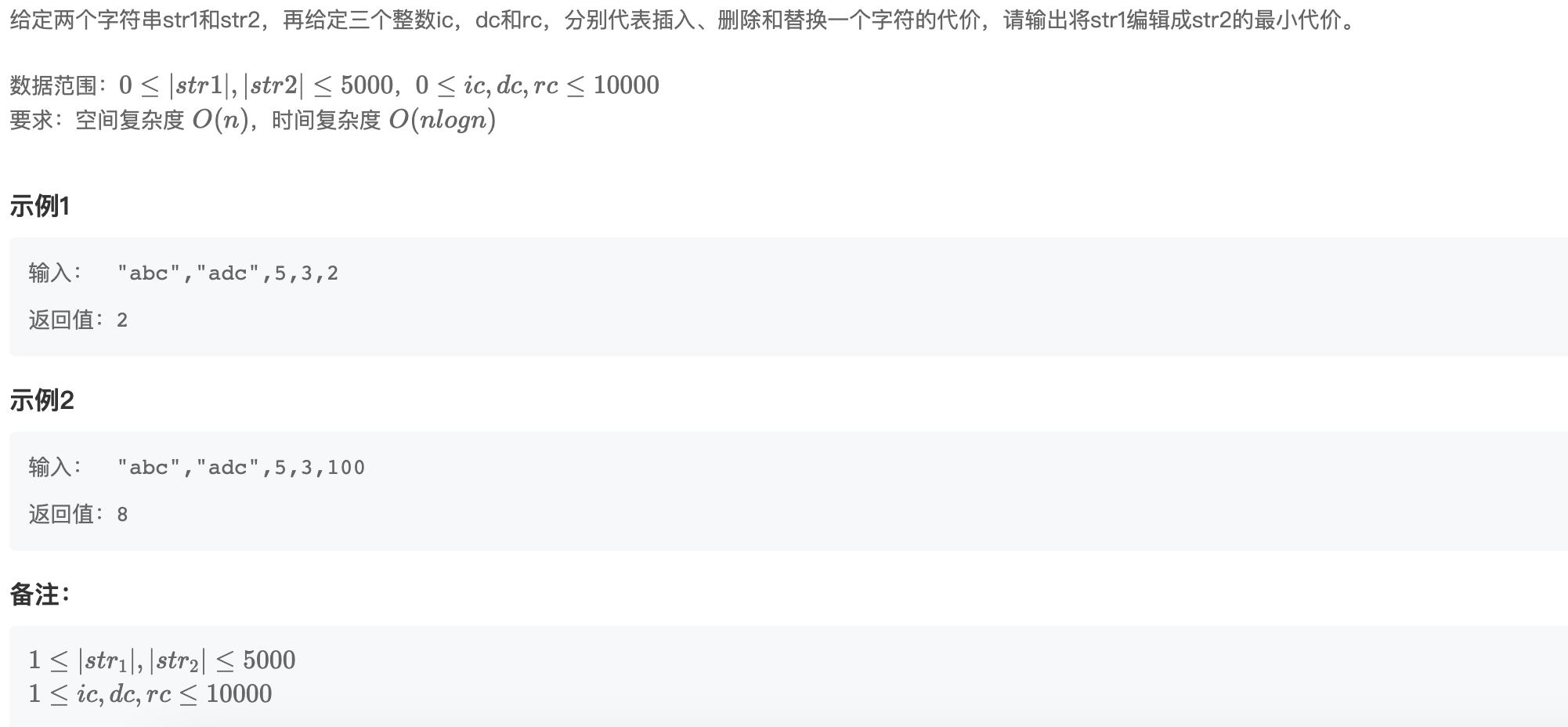
描述 给定两个字符串str1和str2,再给定三个整数ic,dc和rc,分别代表插入、删除和替换一个字符的代价,请输出将str1编辑成str2的最小代价。 数据范围:0≤∣𝑠𝑡𝑟1∣,∣𝑠𝑡𝑟2∣≤50000≤∣str1∣,∣str2∣≤5000,0≤𝑖𝑐,𝑑𝑐,𝑟𝑐≤10000 0≤ic,dc,rc≤10000 要求:空间复杂度 𝑂(𝑛)O(n),时间复杂
蓝桥杯基础训练完美的代价
思想: 运用了贪心的思想 从字符串的左面和右面开始匹配 保证了第一次到的相同字符距离左面的最近,然后将字符串的左面和右面字符去掉 匹配剩余的 一直进行下去 就会产生最终结果! 代码 #include<cstdio>const int maxn = 8001; char str[maxn];int parse(int len)//{int py;int ans1 = 0;int an

牛客小白月赛96 D 最小连通代价
题目在这里 题意: 加边是所有点连通,没有重边和自环,问最小代价 加边规则:两点权值奇偶性相同代价为a,否则为b − 100 ≤ a , b ≤ 100 -100\leq a,b \leq100 −100≤a,b≤100 分析: 这题就是一个分类讨论,先读进来统计奇数点和偶数点 记 n a na na为奇偶性相同的点的连边, n b nb nb为奇偶性不同的点的连边, j i ji ji为奇
字符串-将str1编辑成str2所需最小代价(hard)
一、题目描述 二、解题思路 该题目使用动态规划的思想来解决问题 刚开始我还在想,删除+添加的操作可以等价为替换操作,如果替换操作的Cost大于删除+添加组合操作的Cost之和就需要把 rc=dc+ic。 但是在动态规划中,如果对三种不同的操作方式进行比较然后取较小值,不用进行上面的替换操作就可以达到效果,假设i表示指向str2的指针,j表示指向str1的指针,将str1->str2

x264 帧类型代价计算原理:slicetype_frame_cost 函数分析
slicetype_frame_cost 函数 函数功能 这个函数的核心是计算编码一系列帧(从 p0 到p1,以 b 为当前帧)的代价 cost,并根据这个代价 cost来辅助帧类型决策。它考虑了运动搜索的结果、帧间和帧内预测的成本,并且可以并行处理以提高效率。该函数在帧类型决策、MBtree 分析、场景切换都是作为核心函数。 函数参数 x264_t *h:编码器全局结构体x26

x264 帧类型代价计算原理:slicetype_slice_cost 函数分析
x264 x264 是一个开源的视频编码库,它实现了H.264/AVC标准。H.264是一种广泛使用的压缩标准,用于视频流、视频下载、蓝光光盘以及许多其他形式的数字视频分发。x264 以其高压缩效率和良好的视频质量而著称,是许多视频编辑软件和视频播放器的默认编解码器。 以下是关于 x264 编码器的一些关键点: 开源:x264 是完全开源的,可以在GPL许可下免费使用。 高效:
字符串str1到str2的代价
class MinCost {public:int findMinCost(string A, int n, string B, int m, int c0, int c1, int c2) {// write code here//dp[i][j] 表示A[0..i-1] 转换到 B[0..j-1] 的最小变换// c2替换代价 c0 add // c1 deletevecto
2024-5-1——雇佣 K 位工人的总代价
2024-5-1 题目来源我的题解方法一 优先队列 题目来源 力扣每日一题;题序:2462 我的题解 方法一 优先队列 使用两个优先队列进行模拟 判断k是否等于costs的长度,若是则直接求costs的和返回就行了;否则判断candidates*2与sosts的长度的大小关系 若大于等于,则表示每次都在整个sosts上选择,只需要一个优先队列就行了;若小于,则需要两

初学python记录:力扣2462. 雇佣 K 位工人的总代价
题目: 给你一个下标从 0 开始的整数数组 costs ,其中 costs[i] 是雇佣第 i 位工人的代价。 同时给你两个整数 k 和 candidates 。我们想根据以下规则恰好雇佣 k 位工人: 总共进行 k 轮雇佣,且每一轮恰好雇佣一位工人。在每一轮雇佣中,从最前面 candidates 和最后面 candidates 人中选出代价最小的一位工人,如果有多位代价相同且最小的工人,选

第一周-机器学习-代价函数_intuition
这仅是本人在cousera上学习机器学习的笔记,不能保证其正确性,谨慎参考 1、算法模型,hypothesis(假设),h表示x到y的映射函数: 2、单值线性回归举例分析 3、J为平方误差代价函数(squared error function),为什么除以2*m问不是除以m,视频中说除以2是为求最小值。 4、代价函数(cost function)说明: “The mean i
smac 路径优化器分析——距离成本和代价地图成本分析
参考 泰勒级数直观详解 前向差分,后向差分,中心差分 相关文章 smac 路径优化器分析——平滑度成本分析 smac 路径优化器分析——曲率成本分析 距离成本 距离成本函数 用优化后的点与原路径点的欧氏距离的平方作为成本。 下图中蓝色原点是原路径点,红色原点是优化后路径点。 fig.1 距离成本示意图 距离成本函数为: 是优化后的路径点, 是
ros导航框架-代价地图
1、Costmap2DROS Costmap2DROS是代价地图与其他ROS模块的接口类,move_base中使用的代价地图就是Costmap2DROS对象。 Costmap2DROS负责对代价地图进行更新,以及发布代价地图,我们在rviz上看到的代价地图就是在这个类中进行发布的。 Costmap2DROS中最重要的一个成员就是layered_costmap_。 protected:Layer

交叉熵H(p||q)代价函数
转载地址:http://blog.csdn.net/u012162613/article/details/44239919 本文是《Neural networks and deep learning》概览 中第三章的一部分,讲machine learning算法中用得很多的交叉熵代价函数。 1.从方差代价函数说起 代价函数经常用方差代价函数(即采用均方误差MSE)
91.Minimum Adjustment Cost-最小调整代价(中等题)
最小调整代价 题目 给一个整数数组,调整每个数的大小,使得相邻的两个数的差小于一个给定的整数target,调整每个数的代价为调整前后的差的绝对值,求调整代价之和最小是多少。 注意事项 你可以假设数组中每个整数都是正整数,且小于等于100。样例 对于数组[1, 4, 2, 3]和target=1,最小的调整方案是调整为[2, 3, 2, 3],调整代价之和是2。返回2。题解 public
[算法导论] 最优分类期望代价 / 最优二叉查找树的期望搜索代价 (未完待续)
《算法导论》第15章 动态规划—最优二叉查找树 https://www.cnblogs.com/Anker/archive/2013/03/13/2958488.html
F - 数组的最大代价
题目: 数组A包含N个元素A1, A2......AN。数组B包含N个元素B1, B2......BN。并且数组A中的每一个元素Ai,都满足1 <= Ai <= Bi。数组A的代价定义如下: (公式表示所有两个相邻元素的差的绝对值之和) 给出数组B,计算可能的最大代价S。 Input 第1行:1个数N,表示数组的长度(1 <= N <= 50000)。 第2 - N+1
C#面:如何以较小的内存代价保存 Type、Field 和 Method 信息
可以使用反射来保存 Type、Field 和 Method 信息. 使用 Type 对象: Typ e类是 C# 中用于表示类型的类。可以使用 Type 对象来保存类型信息。 例如,可以使用 typeof 关键字获取一个类型的 Type 对象,并将其保存在变量中。这样可以在运行时使用该变量来访问类型的各种信息,如字段和方法。 使用 FieldInfo 和 MethodInfo对象: Fi
链路代价信息、链路状态信息(链路状态通告LSA)
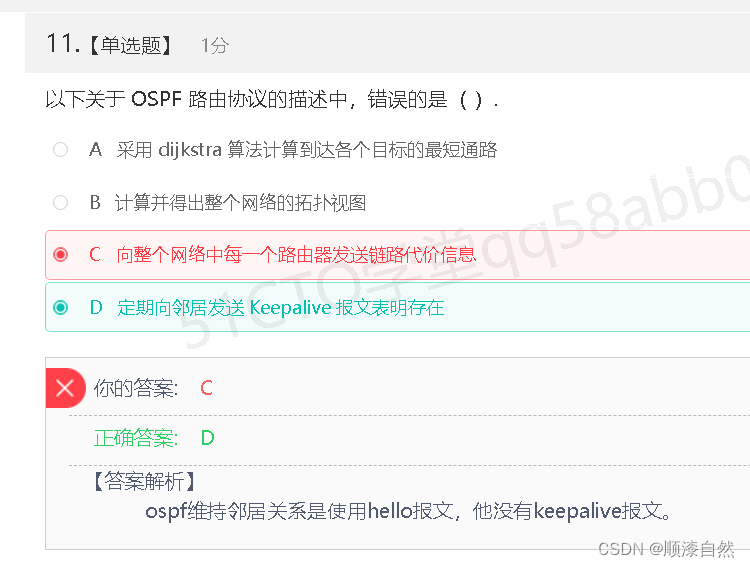
链路代价信息"link cost information" 通常指的是**在网络中,数据包从一个节点传输到另一个节点所需承担的“成本”或者“开销”,这个概念常用于路由算法和网络设计中**。以下是一些关键要点: 1. **路径开销**:路径开销是衡量到达目标位置的代价,其值是两点之间某条路径上所有链路开销的总和。 2. **链路状态**:链路状态描述了路由器接口与相邻路由器接口之间的关系,即路由

BigData-基于代价优化
转:http://hbasefly.com/2017/05/04/bigdata%EF%BC%8Dcbo/ 还记得笔者在上篇文章无意中挖的一个坑么?如若不知,强烈建议看官先行阅读前面两文-《SparkSQL – 有必要坐下来聊聊Join》和《BigData – Join中竟然也有谓词下推!?》。第一篇文章主要分析了大数据领域Join的三种基础算法以及各自的适用场景,第二篇文章在第一篇的基础上进一
组合ZKP代价:探索ZKP中non-native域运算 最新进展
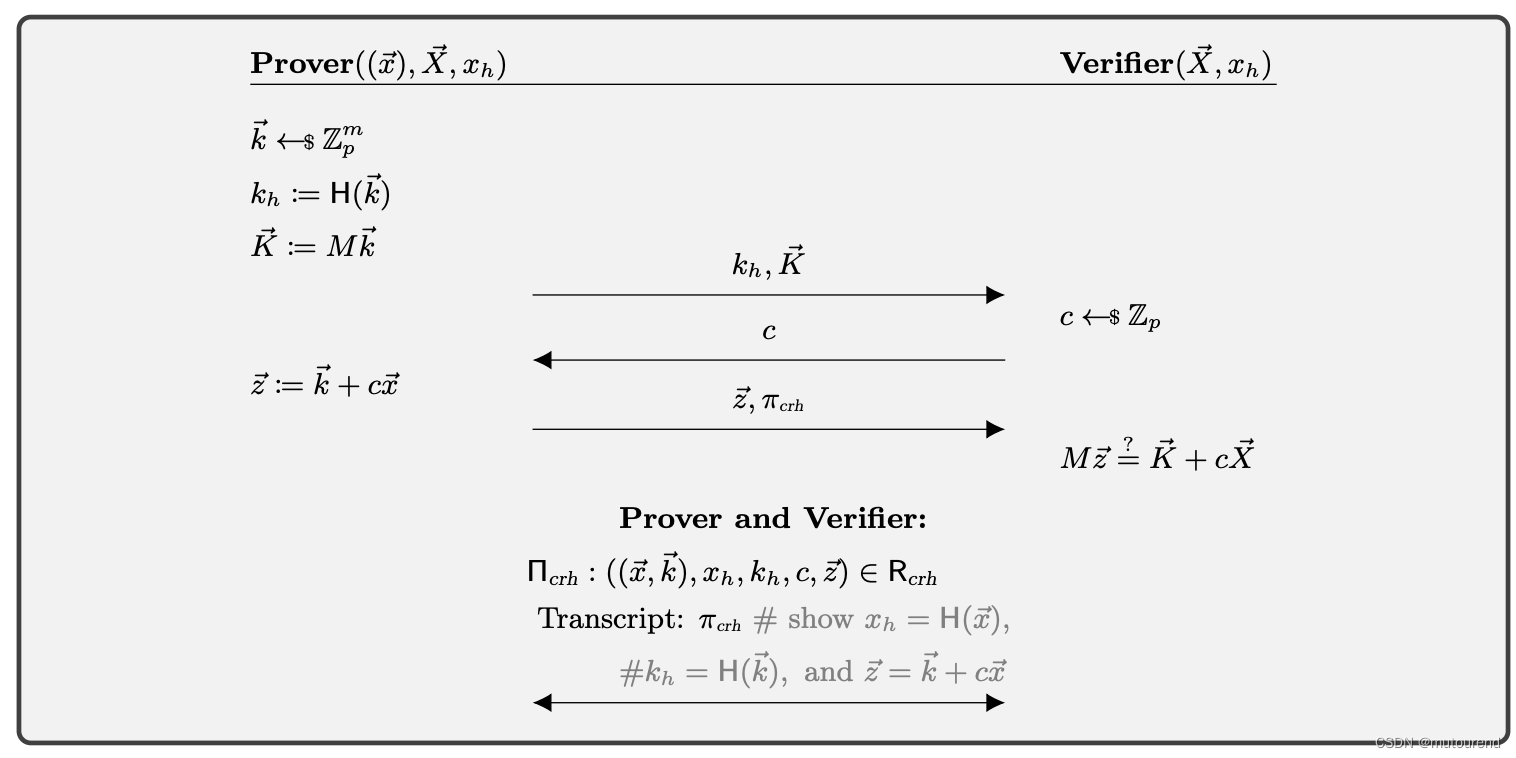
1. 引言 前序博客: 递归证明——cycles of curves是必选项? ‘Foreign field’ 或 ‘non-native field’ 算术在ZKP(zero knowledge proof零知识证明)系统中随处可见。若想使用 ZKP 进行: 布尔运算公钥密码学或 证明组合 则无疑会遇到由于foreign field运算而导致的约束爆炸。 然而,若查看Arkworks等
高性能服务系列【十二】终篇:等待的代价
上一篇《主题匹配》入选CSDN的区块链领域内容榜,最早我看到的时候是排行榜34名,写这篇文章的时候已经落到了46名。虽然我没有觉得和区域链有什么关系,估计入选的原因是那篇文章涉及到几个算法吧。 在整个高性能服务系列中,我很少提及算法,倒不是说和算法没有关系,确切地说,性能本身是很难脱离算法的。一个原因是算法涉及的内容过于庞杂,见《算法导论》和高纳德的《计算机程序设计艺术》;另外一个原因,性能涉及

逻辑斯蒂回归中损失函数和代价函数的推导
参见 Stanford CS230学习笔记(二):Lecture 2 Basics, Logistic Regression and Vectorizing 逻辑斯蒂回归 公式 Y ^ = σ ( w T X + b ) \hat{Y}=\sigma (w^TX+b) Y^=σ(wTX+b) 其公式中的各项数据含义如下: 输入X:假设输入为一张64*64的图片,那么依次取出R、G、B矩
Logistic回归代价函数的数学推导及实现
logistic回归的代价函数形式如下: J ( θ ) = − 1 m [ ∑ i = 1 m y ( i ) log h θ ( x ( i ) ) + ( 1 − y ( i ) ) log ( 1 − h θ ( x ( i ) ) ) ] J(\theta) = -\frac{1}{m}\left[\sum_{i=1}^{m}y^{(i)}\log h_\theta(x^{(i