zephyr专题

《嵌入式系统 – Zephyr开发笔记》 第4章 Zephyr应用开发
原文链接 在开发应用之前,先添加一个工具,tree,从名字就可以看出,这个是用于查看工程的结构,非常方便。使用以下命令安装: $ sudo apt-get update $ sudo apt-get install tree 4.1工程简介 Zephyr是基于Cmake开发的,编译系统是一个以应用程序为中心的系统,它需要一个应用程序来初始化需要编译的内核源码树。应用程序的编译会驱使应

Zephyr-环境搭建
目录 1 前言 2 安装主机依赖 3 获取源码 4 安装工具链 5 编译一个Demo 1 前言 Zephyr支持Ubuntu,macOS,Windows环境下开发,本文介绍基于Ubuntu的环境搭建,包括: Ubuntu开发环境搭建,主要是工具和相关依赖的安装获取工程源码编辑,烧录已经运行Demo 2 安装主机依赖 官方指导建议使用Ubuntu
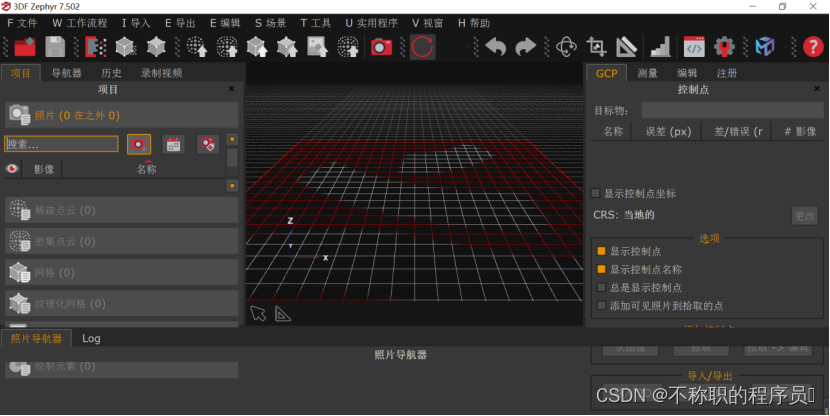
3DF Zephyr v7 解锁版安装教程 (照片转三维模型软件)
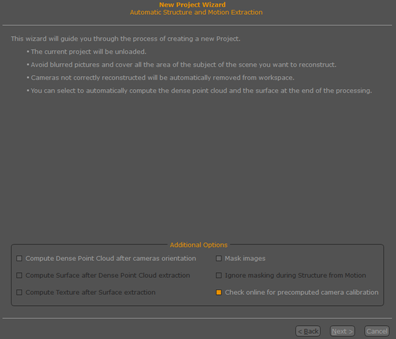
前言 3DF Zephyr是一款照片转三维模型软件,可以导出许多常见的3D格式,甚至无需外部工具即可生成无损视频。此外,可以生成真正的正射影像,数字高程模型(DTM),甚至可以计算面积,体积,角度和轮廓线。 一、下载地址 下载链接:http://dygod/ITSource 点击搜索: 3DF 二、安装步骤 1、解压文件,解压后点击执行 2、选择安装路径 3、点击【安装】

rtos:zephyr同步alerts(通知)
alert可以同linux平台下的signal。 alert的初始化: 方法1: extern int my_alert_handler(struct k_alert *alert);struct k_alert my_alert;k_alert_init(&my_alert, my_alert_handler, 10); 方法2: extern int my_alert_handler

rtos:zephyr工作队列的初始化
工作队列的初始化: #define MY_STACK_SIZE 512#define MY_PRIORITY 5K_THREAD_STACK_DEFINE(my_stack_area, MY_STACK_SIZE);struct k_work_q my_work_q;k_work_q_start(&my_work_q, my_stack_area,K_THREAD_STACK_SIZEOF(m
rtos:zephyr的网络子系统的api接口介绍
初始化:在如果应用需要一个ipv4 的地址,如果一个DHCPv4被使能,应用程序开始之前,需要确定设备能够得到一个ipv4的地址。 设置:在网络子系统中有多种选择,在应用开始之前工程里面需要一个配置文件,配置如:IP地址,IEEE802.15.4等。 创建:创建一个TCP,udp的服务器和客户端。 初始化: CONFIG_NET_APP_AUTO_INIT CONFIG_NET_APP_INIT

Zephyr sensor子系统学习
一、背景 2023年7月份nRF Connect SDK 2.4.0最新版本,使用的Zephyr V3.3版本。从Zephyr 3.5版本在子系统中加入了sensing子系统。 现在最新的nRF Connect SDK 2.6.0 release支持v3.5.99-ncs1,已经支持sensing子系统 nRF52840现在官方支持两个传感器demo ,但不是走的sensing子系统。

Zephyr学习记录
一、Zephyr是什么? Zephyr 是 Linux 基金会推出的一个适用于物联网的小型可伸缩的实时操作系统,支持多种处理器架构。Zephyr 是安全的、开源的、模块化的以及支持多种连接方式。与华为的liteos很像,也不知道谁抄的谁。 二、官方资料 官方介绍 https://docs.zephyrproject.org/latest/index.html 官方源码 htt
Zephyr Windows开发环境搭建
Zephyr 如果有错误或未及时更新,请以官网文档为主 官网:https://docs.zephyrproject.org/latest/develop/getting_started/index.htm 文章目录 Zephyr下载安装Chocolatey安装插件Zephyr SDK获取Zephyr工程 下载安装 Chocolatey 这是一个类似于在Linux系统下 y
Zephyr OS 系列博客索引目录
Zephyr OS 所有的学习笔记已托管到 Github,CSDN 博客里的内容只是 Github 里内容的拷贝,因此链接会有错误,请谅解。 最新的学习笔记请移步 GitHub:https://github.com/tidyjiang8/zephyr-inside 目录 [基础篇] Zephyr OS 简介Hello World连接硬件 Arduino Due漫谈Zephyr与Cont
移植 Zephyr 到 Art-Pi
背景 最近工作中接触到了 Zephyr,不由觉得 Zephyr 是个很强大、全面、优秀的实时操作系统,但同时是有一定的上手难度的,其复杂的构建系统让小编倒吸一口凉气。为了深入研究并完全掌控 Zephyr,小编决定把它移植到手头的开发板上,为后续探究 Zephyr 源码仓库的构建原理、系统启动原理、多种调度机制 打下基础。 基础知识 搭建 Zephyr 环境能够使用基本的 west 命令编
Zephyr (nrf)
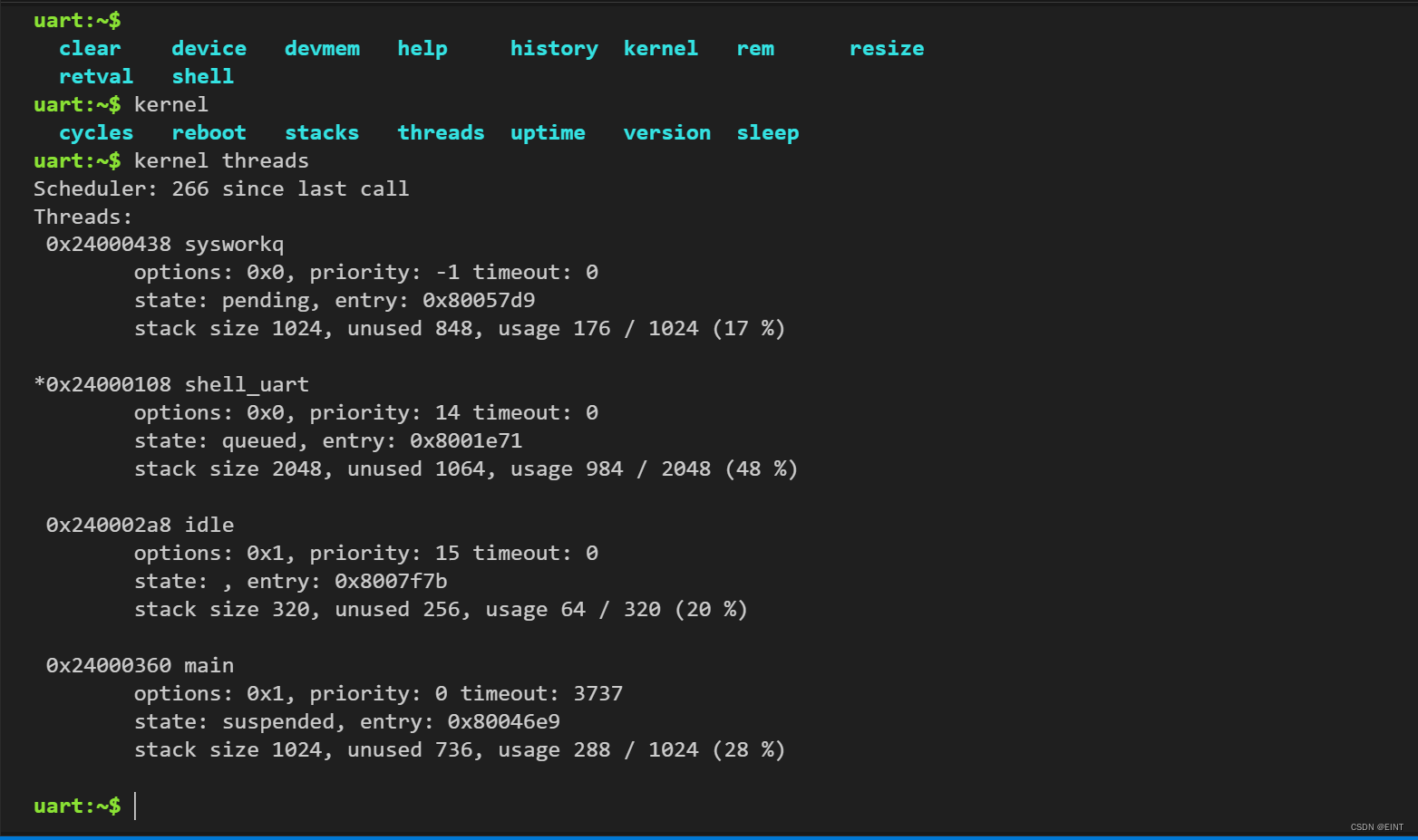
记录开发zephyr的两三事 微信:bangYS 刚听到zephyr是前些年,一个朋友跟我说的,嵌入式的Linux。 的确,Zephyr跟Linux有千丝万缕的联系。 1. Zephyr用dts管理设备,底层也分驱动层和hal层。 2. Zephyr工程也是通过Kconfig来配置的。 3. Zephyr支持shell接入口,虽然没有Linux的shell功能强大,也是一个强大的交互接

Zephyr-7B论文解析及全量训练、Lora训练
文章目录 一、Zephyr:Direct Distillation of LM Alignment1.1 开发经过1.1.1 Zephyr-7B-alpha1.1.2 Zephyr-7B-beta 1.2 摘要1.3 相关工作1.4 算法1.4.1 蒸馏监督微调(dSFT)1.4.2 基于偏好的AI反馈 (AIF)1.4.3 直接蒸馏偏好优化(dDPO)1.4.4 训练细节 1.5 实验 二
使用3DF Zephyr Free 进行车辆高精度三维建模
3DF Zephyr是一款功能强大的图片转三维模型软件,并且能够将模型以许多常见的3D格式导出。下面使用3DF Zephyr Free进行车辆高精度三维建模演示。 一、准备阶段 (1)3DF Zephyr Free软件:https://www.3dflow.net/ (14天的试用期) (2)准备约30张不同角度的车辆外形图片。以三个高度、环绕车辆一周进行拍照。如下所示:
Zephyr 源码调试
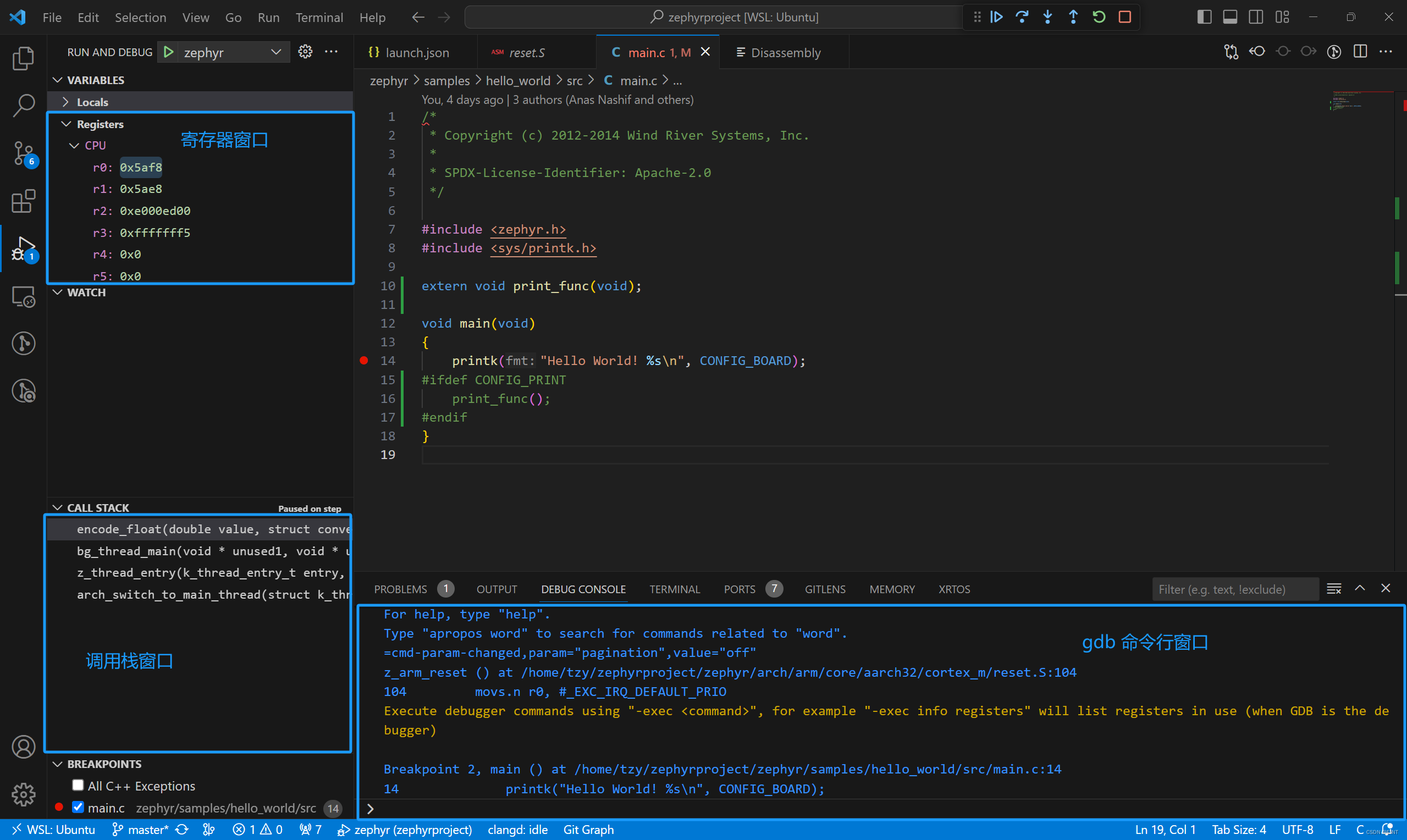
背景 调试环境对于学习源码非常重要,但嵌入式系统的调试环境搭建稍微有点复杂,需要的条件略多。本文章介绍如何在 Zephyr 提供的 qemu 上调试 Zephyr 源码,为后续分析 Zephyr OS 相关原理做铺垫。 环境 我的开发环境为 wsl ubuntu,对于 windows 也是同样的原理。基于 vscode 图形化界面有利于阅读源码,其基本原理是 vscode 通过 gdb 连接
Zephyr 学习笔记(一)
概述 Zephyr OS 是一个占用空间小的内核,用于资源受限的嵌入式系统:从简单的嵌入式环境传感器、LED 可穿戴设备到复杂的嵌入式控制器、智能手表和物联网无线应用。 Zephyr 内核支持多种架构,包括: ARCv2 (EM and HS) and ARCv3(HS6X)ARMv6-M、ARMv7-M、ARMv8-MARMv7-A and ARMv8-A (Cortex-A, 32- a

StabilityAI公司发布新模型StableLM Zephyr 3B 使人工智能的稳定性变得“讨人喜”
Stability AI 最为人所知的是其稳定的扩散文本到图像生成 AI 模型套件,但这并不是该公司的全部。Stability AI 发布了最新的模型 ——StableLM Zephyr 3B,这是一个 30 亿参数的大型语言模型(LLM),用于聊天使用案例,包括文本生成、摘要和内容个性化。这个新模型是 StableLM 文本生成模型的一个更小、优化的版本,Stability AI 在

zephyr 调度时机
Threads — Zephyr Project Documentationhttps://docs.zephyrproject.org/latest/reference/kernel/threads/index.html?highlight=preemptive#thread-prioritiesScheduling — Zephyr Project Documentationhttps://d
RLHF的替代算法之DPO原理解析:从Zephyr的DPO到Claude的RAILF
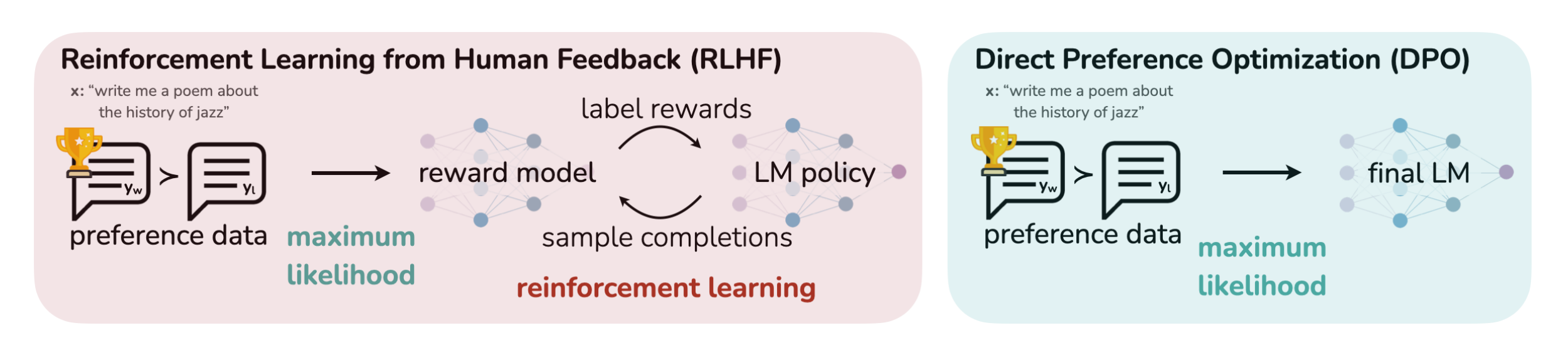
前言 本文的成就是一个点顺着一个点而来的,成文过程颇有意思 首先,如上文所说,我司正在做三大LLM项目,其中一个是论文审稿GPT第二版,在模型选型的时候,关注到了Mistral 7B(其背后的公司Mistral AI号称欧洲的OpenAI,当然 你权且一听,切勿过于当真)而由Mistral 7B顺带关注到了基于其微调的Zephyr 7B,而一了解Zephyr 7B的论文,发现它还挺有意思的,即
Zephyr-7B-β :类GPT的高速推理LLM
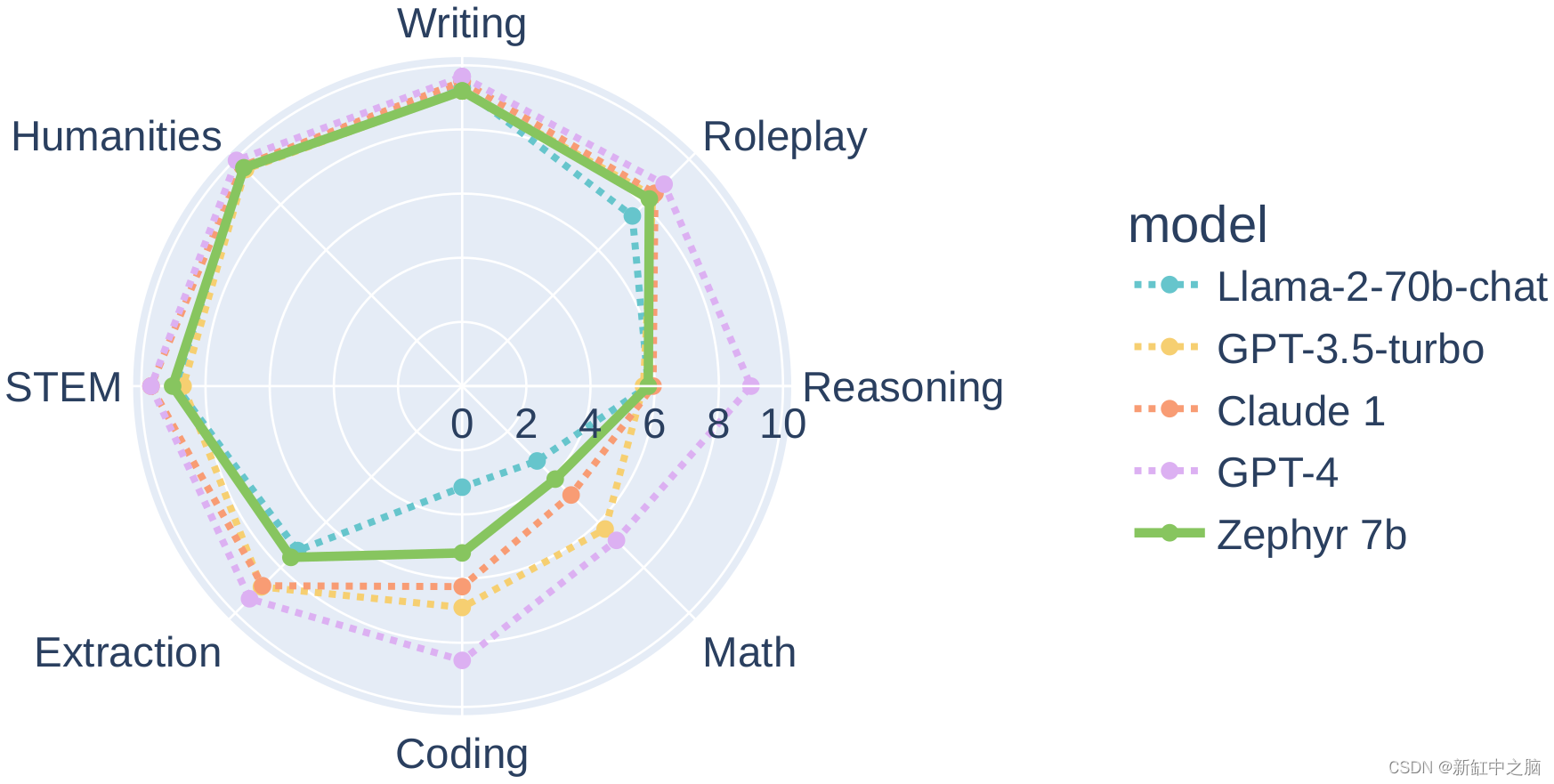
Zephyr 是一系列语言模型,经过训练可以充当有用的助手。 Zephyr-7B-β 是该系列中的第二个模型,是 Mistralai/Mistral-7B-v0.1 的微调版本,使用直接偏好优化 (DPO) 在公开可用的合成数据集上进行训练 。 我们发现,删除这些数据集的内置对齐可以提高 MT Bench 的性能,并使模型更加有用。 然而,这意味着该模型在提示时可能会生成有问题的文本,并且只能用于

nrf5340 zephyr添加一个宏定义
1. prj.conf文件添加 CONFIG_FEA_NTC_DETECT_SUPPORT=y #y的前面不要有空格 不然编译报错 2. Kconfig文件添加 ## Copyright (c) 2018 Nordic Semiconductor## SPDX-License-Identifier: LicenseRef-BSD-5-Clause-Nordic

zephyr死机原因追踪
找到这个文件下面的lst文件 根据pc指针找到当前运行的地方,在zephyr.lst文件中可以定位到pc地址 MMFA:MemManage Fault Address Register BFAR: bus fault address register HFSR; hardfault status register CFSR:configurable fault stat
初识zephyr-rtos
平台介绍:(以下仅为我自己的配置,实际支持多种平台,windows的话虽然可以支持,但还是建议在wsl上进行相关开发学习) 系统:ubuntu 22.04开发板:nucleo_f401re$ python3 --version Python 3.10.12cmake --version cmake version 3.22.1dtc --version Version: DTC 1.6.1

zephyr 环境设置
2016/03/08 注:今天搜了一下,有个blog也记录了几乎一样的内容,参考: http://coldnew.github.io/blog/2016/02/21_zephyr/?utm_source=tuicool&utm_medium=referral zephyr 是 Linux 基金会推出的面向物联网的 RTOS,与 Linux 相比 footprint 非常小。虽然是第一版,但是