vlp16专题
LOAM系列——ALOAM配置、安装、问题解决及VLP16测试效果以及关键记录
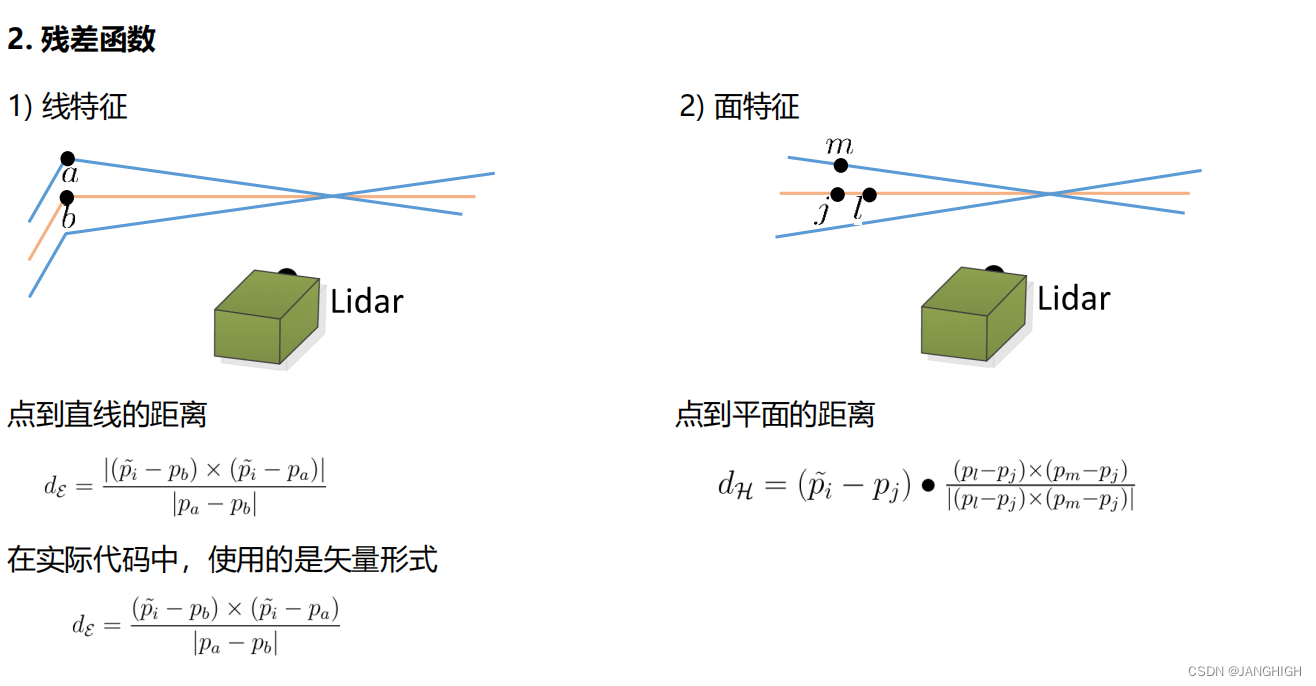
LOAM系列——ALOAM配置、安装、问题解决及VLP16测试效果以及关键记录 安装依赖安装bag包测试问题解决问题1解决1 关键记录A-LOAM主要特点残差关键代码 安装依赖 rosCeres SolverPCL 安装 cd ~/catkin_ws/srcgit clone https://github.com/HKUST-Aerial-Robotics/A-LO

Velodyne VLP16 激光雷达使用(遇到问题要学会看文档)
VLP-16激光雷达是Velodyne公司出品的最小型的3维激光雷达,保留了电机转速可调节的功能。实时上传周围距离和反射率的测量值。VLP-16具有100米的远量程测量距离。精巧的外观设计使得安装非常方便。重量轻,只有830g,非常适合安装在小型无人机和小型移动机器人上。 每秒高达30万个点数据输出。±15°的垂直视场,360°水平视场扫描。 测试系统:ubuntru16.04 x64 Ro
【SLAM】之Velodyne VLP16 激光雷达使用
运行环境:Ubuntu14.04和ROS:indigo 参考教程1:https://blog.csdn.net/littlethunder/article/details/51920681 按照上面教程中下面一步没有配置成功: 使用手动配置成功,如下: 参考教程2:https://www.cnblogs.com/Mrzhang95/p/9443808.html 配置完成后
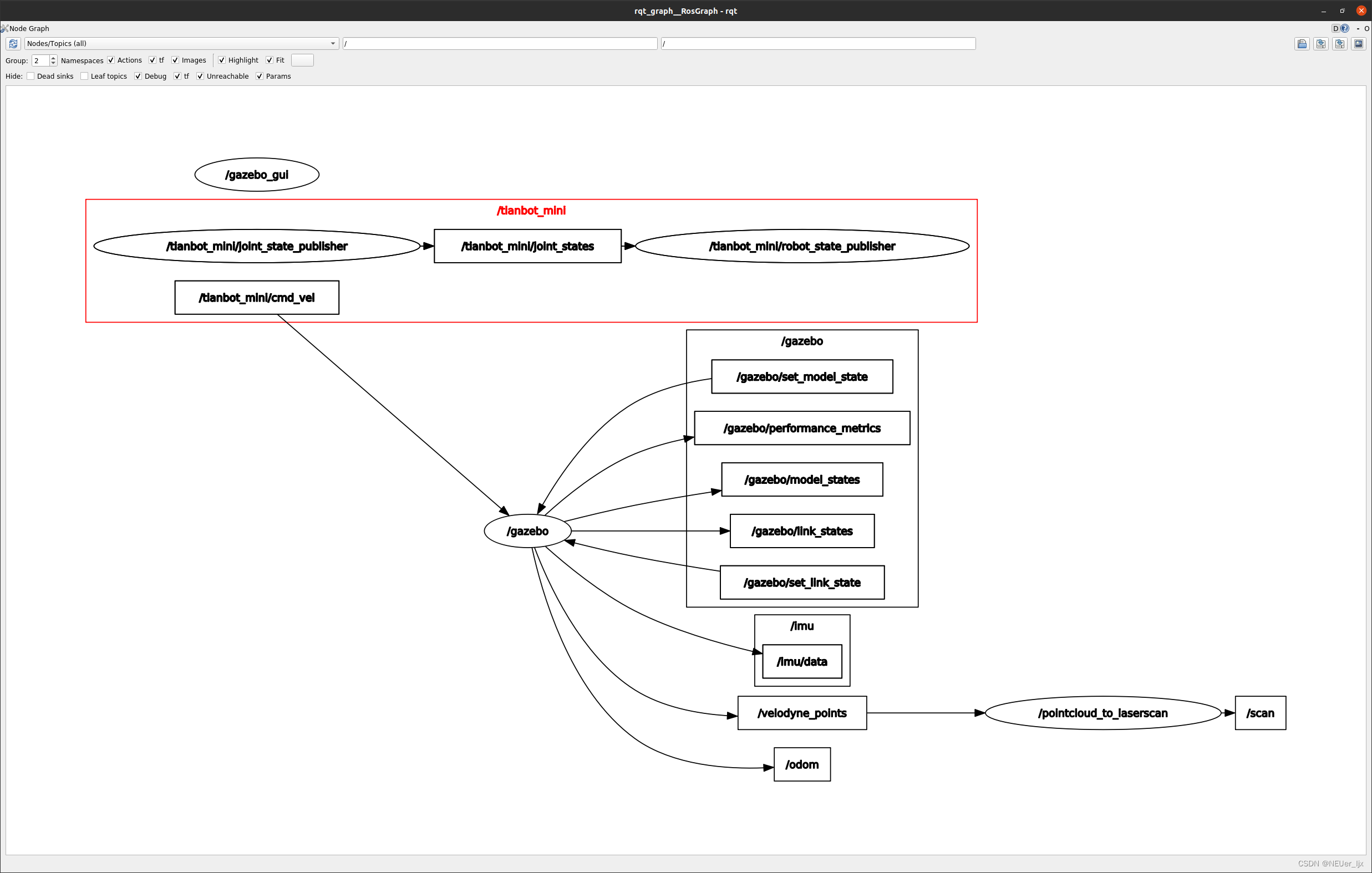
VLP16:使用pointcloud_to_laserscan将三维点云转化为二维LaserScan
一、安装pointcloud_to_laserscan包 GitHub地址:GitHub - ros-perception/pointcloud_to_laserscan at lunar-develhttps://github.com/ros-perception/pointcloud_to_laserscan/tree/lunar-devel 注意避坑:不能用git clone来下载,即
Ubuntu安装ROS、显示VLP16线激光雷达、录制并回放
一. 安装ROS: 打开终端并输入: wget http://fishros.com/install -O fishros && . fishros 来源:鱼香ROS一键安装 按照提示输入数字即可。 二. 安装Velodyne的ROS依赖: (一)查看ROS版本名 1.直接查看 可以通过roscore查看ROS版本 (在新终端中输入:) roscore 2.间接查看

ROS2 Humble 下接入velodyne VLP16 Lidar
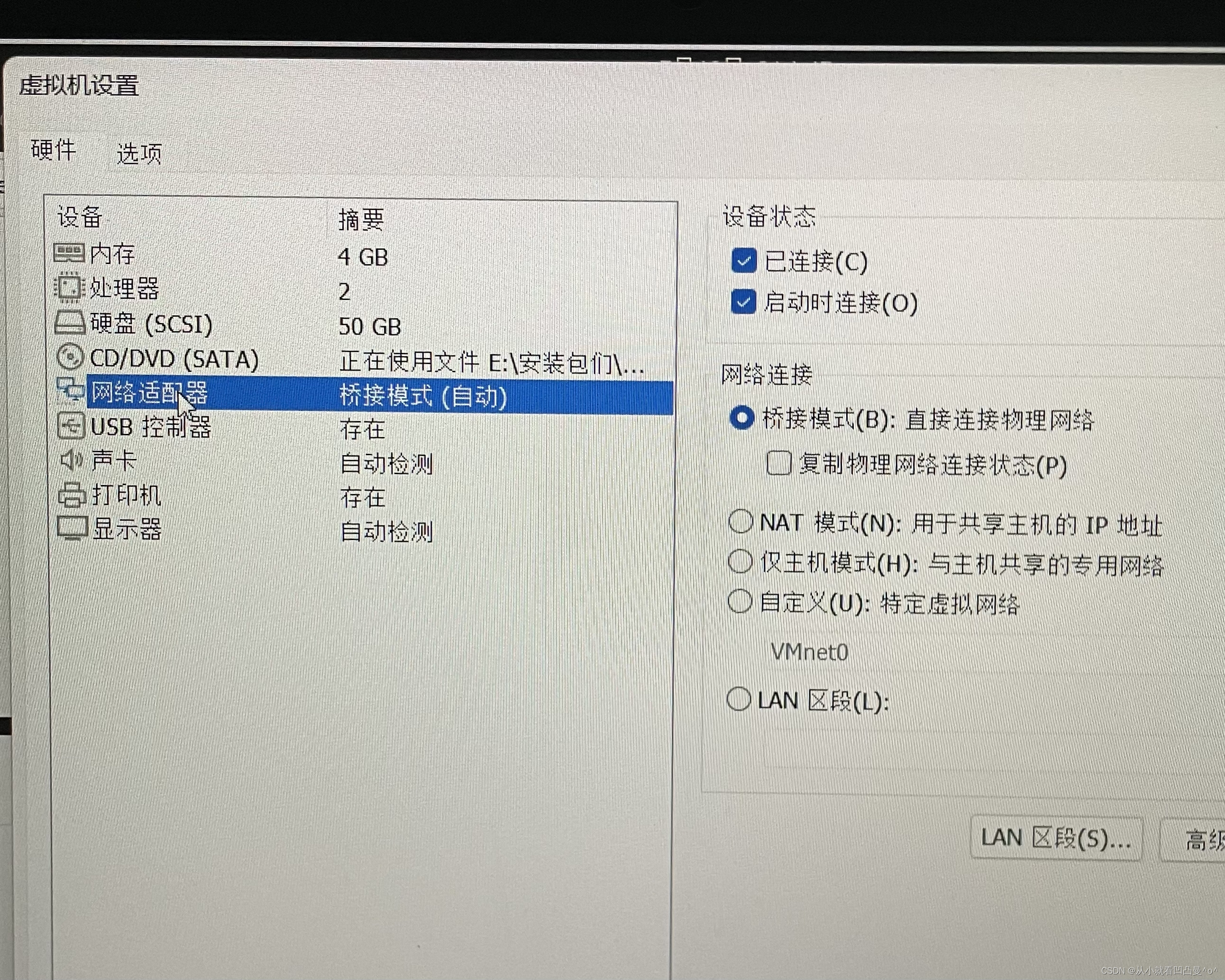
1 硬件连接 网线连接。主机IP设置到192.168.1.xxx。 正确连接的话,用浏览器打开192.168.1.201可以接入Lidar管理页面,在管理页面设置主机IP,也可以设置为255.255.255.255进行广播。 2 用veloview测试数据 3 安装ROS2驱动 3.1 安装依赖 sudo apt install ros-foxy-diagnostic-updater s

Velodyne VLP16 配置
本文转载自: 点云数据获取——velodyne VLP16 配置 https://www.cnblogs.com/Mrzhang95/p/9443808.html 翻译自:http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16 1.连接电脑和velodyne a) velo

Xavier上 VLP16可视化
Xavier上VLP16可视化 准备工具:VLP16激光雷达,网线,Xavier(装上ros)参考文章vlp16使用说明 #在Xavier上安装ros依赖项sudo apt-get install ros-melodic-velodyne#创建ros工程mkdir -p catkin_velodyne/srccd catkin_velodyne/srcgit clone https:/

Velodyne VLP16时间同步
Velodyne VLP16时间同步 时间同步需要GPS信号和PPS信号需求1.介绍2.设置界面3.背景4.PPS Qualifier4.1 Require GPS Receiver Valid4.2 Require PPS Lock4.3 Delay 5. GPS Qualifier5.1 Require GPS Receiver Valid 6.应用7.汇总8.电平需求 时间同