本文主要是介绍Ubuntu安装ROS、显示VLP16线激光雷达、录制并回放,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一. 安装ROS:
打开终端并输入:
wget http://fishros.com/install -O fishros && . fishros来源:鱼香ROS一键安装
按照提示输入数字即可。
二. 安装Velodyne的ROS依赖:
(一)查看ROS版本名
1.直接查看
可以通过roscore查看ROS版本
(在新终端中输入:)
roscore2.间接查看
通过Ubuntu版本与ROS版本对照查看
| Ubuntu版本 | ROS版本 |
| 14.04 | indigo |
| 16.04 | kinetic |
| 18.04 | melodic |
| 20.04 | noetic |
(二)安装ROS依赖
sudo apt install ros-ROS版本名-velodyne如:Ubuntu20.04安装ROS依赖
sudo apt install ros-noetic-velodyne三. 安装Velodyne驱动:
1.创建工作空间:
(打开终端,默认在根目录~下)
mkdir -p 工作空间名/src2.下载驱动
cd 工作空间名/src
git clone https://github.com/ros-drivers/velodyne.git克隆不成功时,可以进入自己进入网址:https://github.com/ros-drivers/中,点击“velodyne”项,点击“code”并下拉,点击“download zip”实现下载。解压之后将“velodyne-master"文件夹剪切到“工作空间名/src”下即可。
3.编译
cd ..(或者:cd ~/工作空间名)
catkin_make
source devel/setup.bash四. 连接激光雷达(主机)
1.连接
将激光雷达的网线连接到电脑
2.设置IP
设置自己的电脑的IP为手动;并修改IP:192.168.1.XX(不是192.168.1.201就行)
3.进入Lidar设置界面
打开浏览器输入:192.168.1.201
4.适当修改
将“Data Port”改为2368
四. 连接激光雷达(虚拟机)
1.连接
将激光雷达的网线连接到电脑
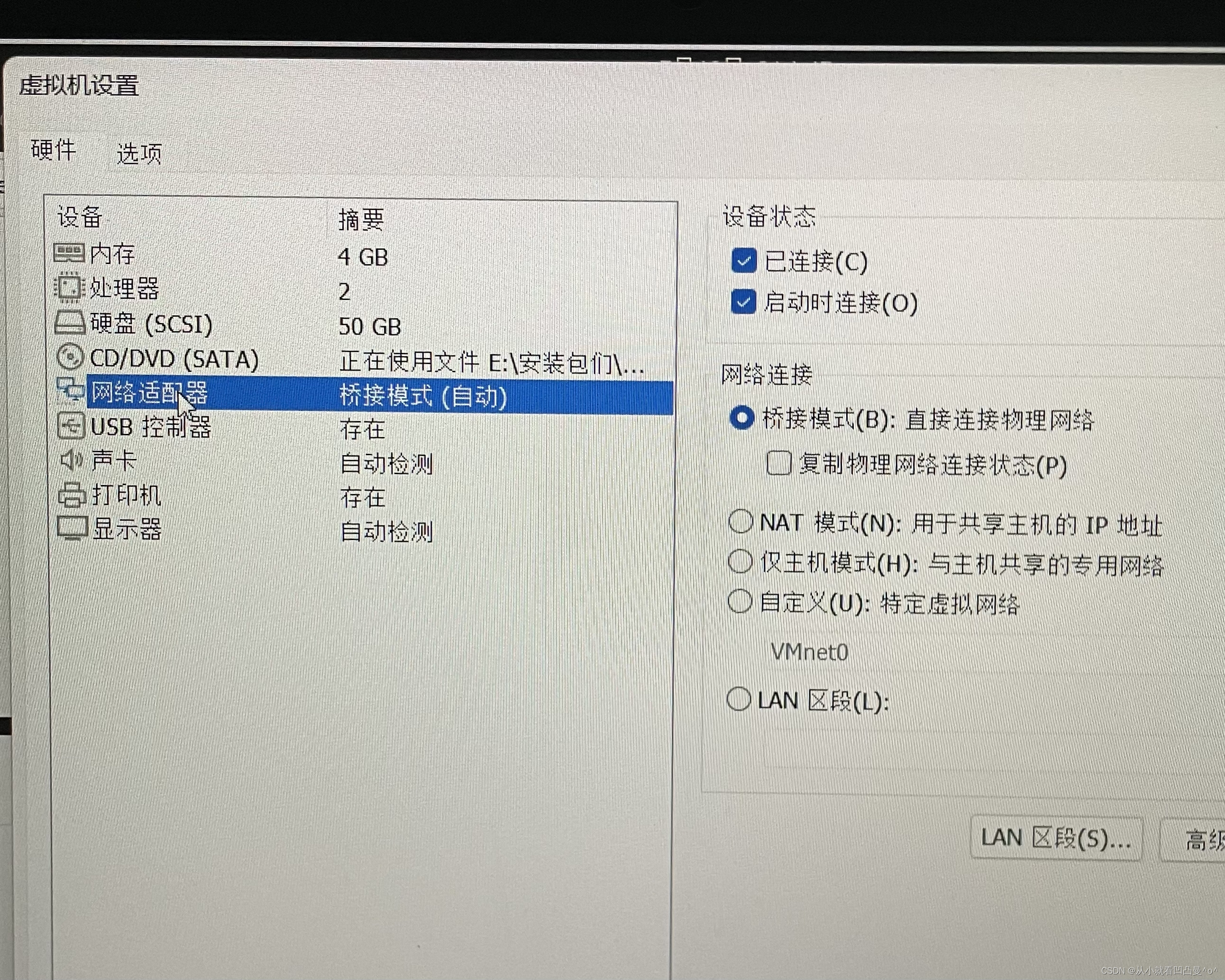
2.修改网络
找到最上面“虚拟机”,下拉并点击“设置”,在“硬件”中找到“网络适配器”,“网络连接”模式选中“桥接模式”
3.设置IP
设置自己的电脑的IP为手动;并修改IP:192.168.1.XX(不是192.168.1.201就行)
4.进入LIDAR设置界面
打开浏览器输入:192.168.1.201
5.适当修改
将“Data Port”改为2368
五. 启动ROS
(打开终端并输入:)
roscore六. ROS启动Velodyne:
(打开新终端并输入:)
roslaunch velodyne_pointcloud VLP16_points.launch七. ROS显示激光雷达
1.打开新终端并输入:
rviz2.点击左下角“Add”,并选择“Pointcloud2”
3.“Pointcloud2”下拉找到“Topic”,点击下拉选择“/velodyne_points”
4.左上角“Global Options”下的“Fixed Frame”中,删除“map”,输入:velodyne
5.点击回车键即可
八. 录制并回放
1.录制
(打开新终端并输入:)
rosbag record -O 路径/包文件名 /velodyne_points* 当只有包文件名时,默认保存在根目录下
* 当路径为绝对路径时,则保存到绝对路径下
* 最终保存文件为:包文件名.bag
2.停止录制
(在录制包的终端中按下:)
Ctrl + C
3.回放:
重复第(七)步
(打开新终端并输入:)
rosbag play 路径/包文件名.bag
这篇关于Ubuntu安装ROS、显示VLP16线激光雷达、录制并回放的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







