本文主要是介绍【SLAM】之Velodyne VLP16 激光雷达使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
运行环境:Ubuntu14.04和ROS:indigo
参考教程1:https://blog.csdn.net/littlethunder/article/details/51920681
按照上面教程中下面一步没有配置成功:
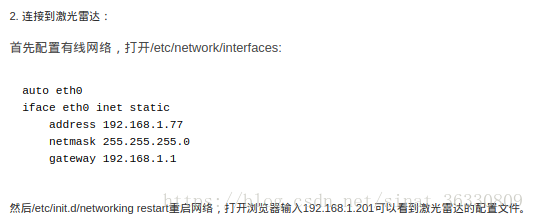
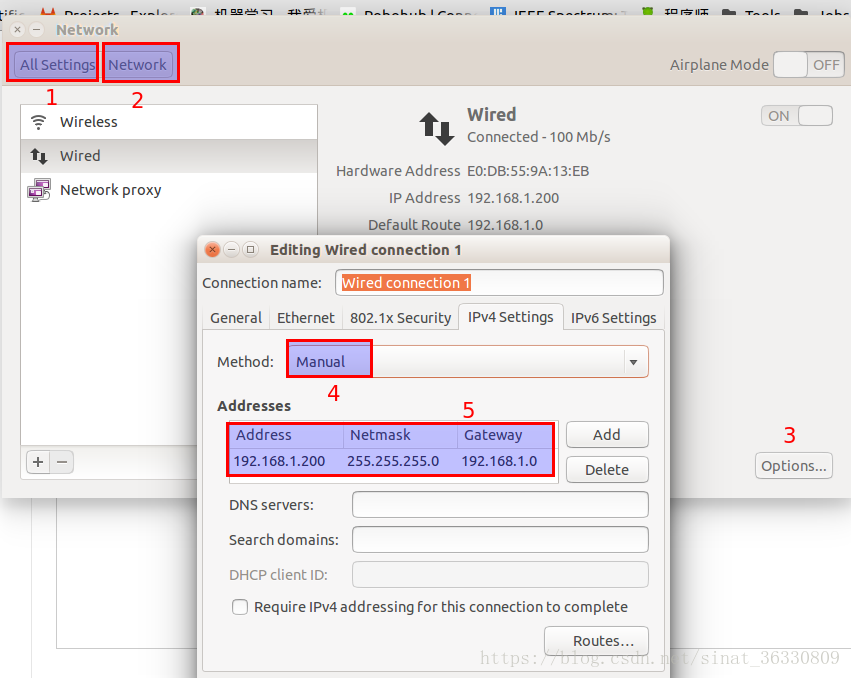
使用手动配置成功,如下:
参考教程2:https://www.cnblogs.com/Mrzhang95/p/9443808.html

配置完成后,打开浏览器,输入网址192.168.1.201,出现以下界面界面则连接成功:
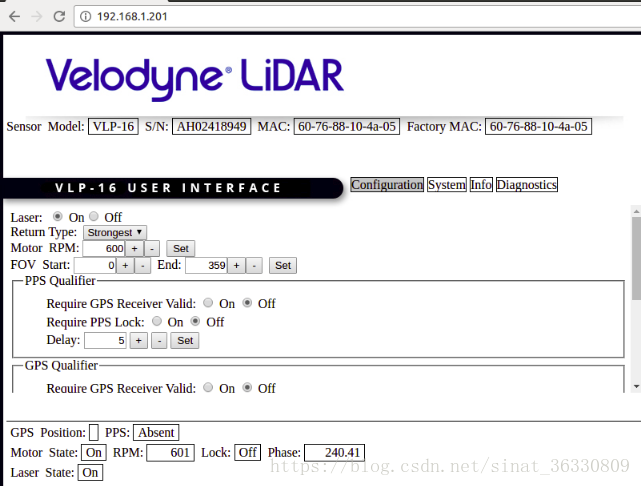
之后继续按照教程1操作!
注意第4步:

第4步操作会生成VLP-16.yaml文件,注意文件路径!
文件VLP-16.xml拷贝到桌面,或者使用该文件所在的位置。

其他照做即可!
最后效果:
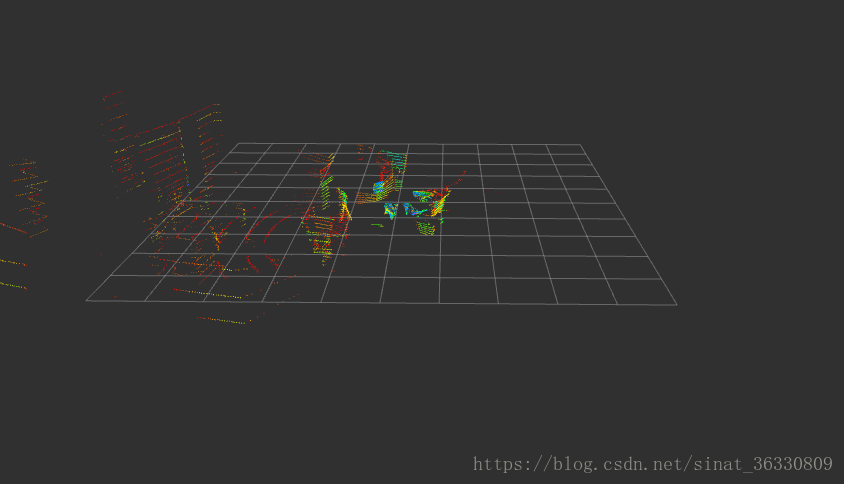
很清楚,16线的。
这篇关于【SLAM】之Velodyne VLP16 激光雷达使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



