本文主要是介绍Xavier上 VLP16可视化,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Xavier上VLP16可视化
- 准备工具:VLP16激光雷达,网线,Xavier(装上ros)
- 参考文章vlp16使用说明
-
#在Xavier上安装ros依赖项 sudo apt-get install ros-melodic-velodyne #创建ros工程 mkdir -p catkin_velodyne/src cd catkin_velodyne/src git clone https://github.com/ros-drivers/velodyne.git cd .. rosdep install --from-paths src --ignore-src --rosdistro melodic -y catkin_make source devel/setup.bash``` - 配置本机有线连接IP地址
1.点击电脑右上角网络标志,然后再显示出来的信息中点击最后一个选项编辑连接
2.点击有线连接1,如果以太网这个选项没有有线连接的相关内容,就点增加,创建一个以太网(enth)的连接
3.选中点击编辑,然后选择IPV4在将IP地址子网掩码修改一下.修改标准:IP地址:192.168.1.x(x可以为1到254除开201以外的所有值,因为201是激光雷达的IP),我设的192.168.1.70
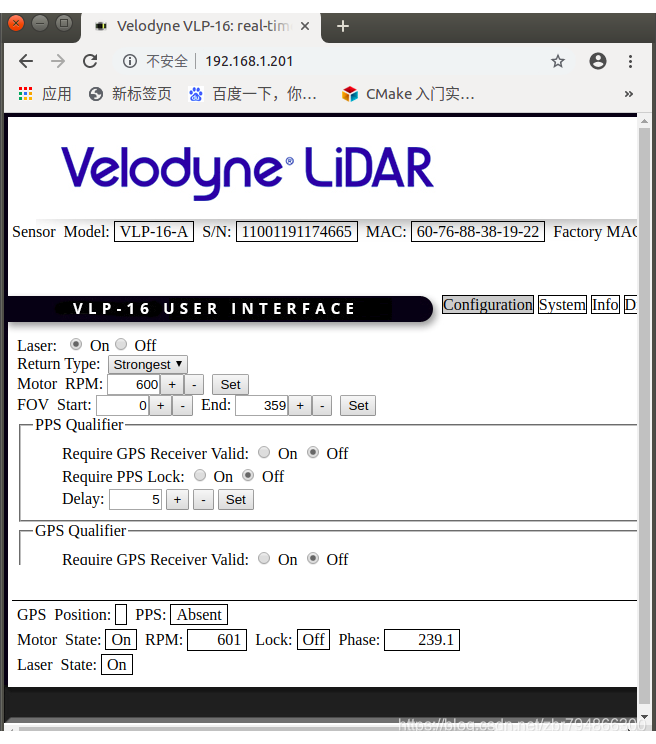
子网掩码:255.255.255.0 网关:要么192.168.1.1,要么不设置不管最后保存即可 - 用网线将xavier和VLP16连在一起,进入网址输入192.168.1.201,出现如下图则连接成功。
- 打开终端,运行命令
roslaunch velodyne_pointcloud VLP16_points.launch - 打开rviz,查看3d数据
会显示一个可以旋转的界面出来,但是并没有数据。需要你添加点进去rosrun rviz rviz -f velodyne- 首先点击Add,添加pointsCloud2

- 然后再左边的目录中多了个PointsCloud2,在该目录下点击topic,输入/velodyne_points.

- 最后实时的3D数据就显示出来了:

- 首先点击Add,添加pointsCloud2
这篇关于Xavier上 VLP16可视化的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!