xavier专题

xavier NX编译caffe错误记录(一)
在xavier NX上编译caffe时遇到一些错误,简单记录一下, 目录 一:首先是缺少各种库,对于这种错误直接用下面这篇博客的笔记安装相应的依赖库即可。 二:无法读取cudnn版本 三:找不到opencv 四:CUDA_cublas_device_LIBRARY (ADVANCED) linked by target "caffe" in directory /data/software/c

Jetson Xavier NX apt更换国内源
在xavier NX板子上安装软件包的时候,网速特别慢,于是想更换源,网上找到了如下博客,验证可用。 原文地址 [NVIDIA]-3 入手 Jetson Xavier NX apt更换国内源_darnell888的博客-CSDN博客 本文主要讲述,基于 Jetson Xavier NX 开发者套件apt更换国内源。 What is Jetson Xavier NX : NVIDIA® Jet

NVIDIA Jetson xavier NX安装torchvision
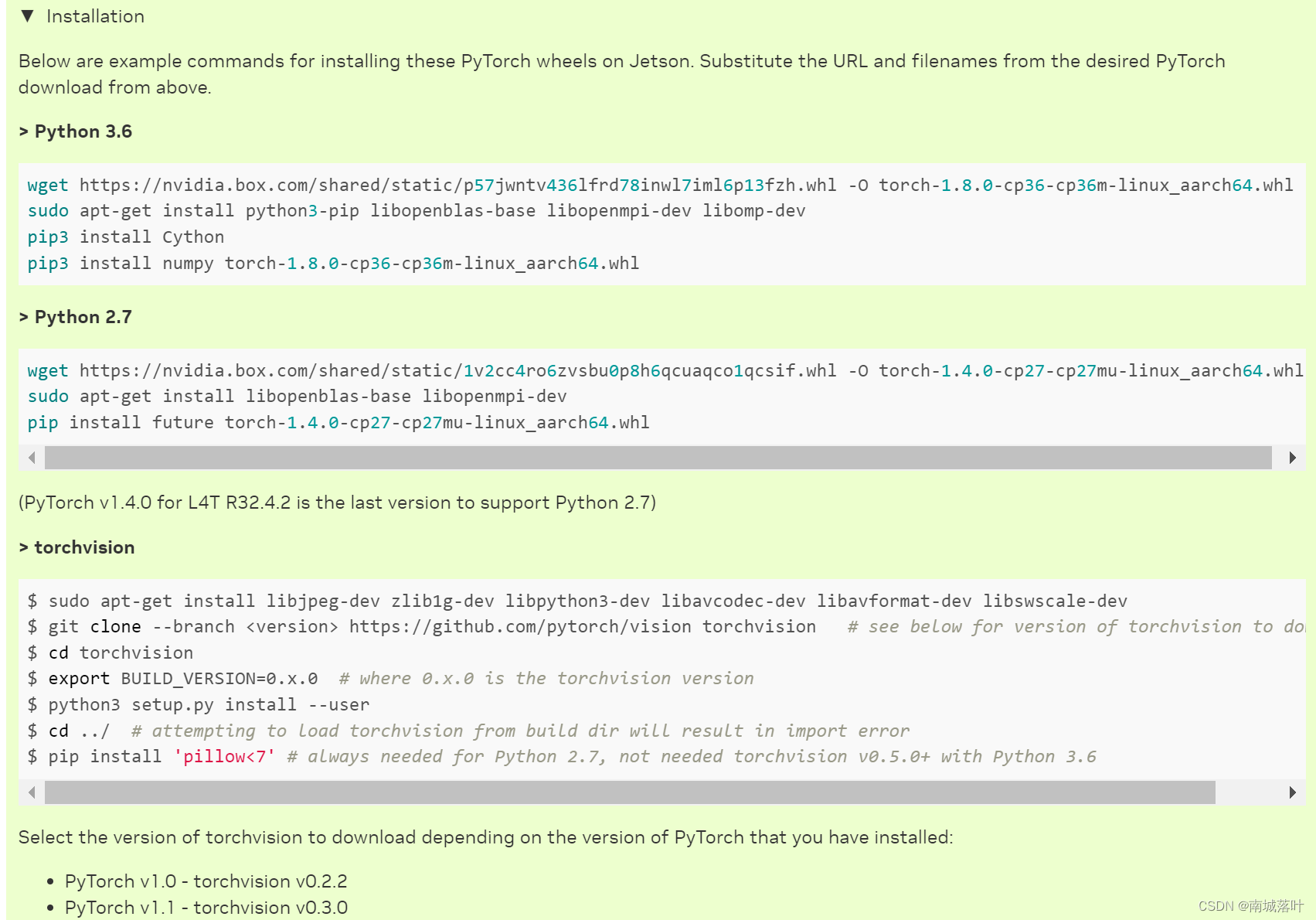
上一篇文章里面记录了在xavier NX上安装pytorch,https://www.cnblogs.com/cumtchw/p/13273753.html 然后接下来安装torchvision,下面是英伟达官网上的torchvision的安装方法:https://forums.developer.nvidia.com/t/pytorch-for-jetson-nano-version-1-5-
Jetson AGX Xavier避坑指南(三)——环境搭建1.(python3、pip、virtualenv、ros)_转载
原文网址如下:https://blog.csdn.net/zxxxiazai/article/details/103419986
Jetson xavier NX 485串口接口封装/Jetson Xavier NX 串口通讯
目录 1.查看Jetson Xavier NX串口 2.硬件调试环境搭建 3.代码 3.1.dataType.h 3.2.rs485Service.h 3.3 rs485Service.cpp 3.4 demo 4 实验结果 1.查看Jetson Xavier NX串口 首先查看NX板子上的串口,执行 ll /dev | grep tty 可以看到串口,这次我们使用ttyT

jetson xavier nx 编译使用 libtorch
不能直接下载编译好的。使用起来会报错要自己编译,详细根据自己的 JetPack 去下载对应版本 下载地址:JetPack libtorch下载地址 3.安装 sudo apt-get update sudo apt-get upgradesudo apt-get install python3-pip libopenblas-base libopenmpi-devpip3 instal
arm x86 交叉编译 ROS 项目程序最简单的方式及踩坑完整经验 ,亲测可以运行简单和复杂的 ROS 项目 Jetson Xavier NX 3588
需求: ROS 程序源代码每次在 NX 或者 RK3588 编译很慢,并且有源代码泄露的风险,需要在x86 intel 的笔记本 ubuntu 的环境交叉编译 ROS 程序, 之前试过传统的ros 项目交叉编译方式,特别复杂依赖很多,并且试了很久都不成功,这次尝试了通过 Docker 移植的方案,很简单也比较顺利。 安装qemu sudo apt install qemu qemu-
Understanding the difficulty of training deep feedforward neural networks (Xavier)
转自:http://blog.csdn.net/shuzfan/article/details/51338178 “Xavier”初始化方法是一种很有效的神经网络初始化方法,方法来源于2010年的一篇论文 《Understanding the difficulty of training deep feedforward neural networks》 可惜直到近两年,这个方法才逐渐得
国产【Jetson Xavier NX】——从裸机到深度学习开发环境配置
1、设置系统从固态硬盘启动 英伟达官方NX出厂是直接将SD卡(64/128G)烧录系统作为系统盘使用,国产NX出厂是将系统配置在8G内存中,在后续使用中需配置大量开发包,故将系统设置为从固态硬盘启动。 参考链接 https://blog.51cto.com/u_15352549/5393355 2、换源 先备份源文件,再打开编辑 cp /etc/apt/sources.list /etc
pytorch-13_3 模型参数初始化方法:Xavier和Kaiming(HE)
一、激活函数使用过程中的优化 不同激活函数在深层次神经网络运行时存在的不同问题 ReLU激活函数叠加后出现的模型失效问题,也就是Dead ReLU Problem(神经元活性失效问题)。Sigmoid激活函数堆叠后出现的问题,本质上就是梯度消失所导致的问题。tanh激活函数堆叠所导致的迭代过程剧烈波动的问题,也被称为迭代不平稳,需要优化迭代过程来解决。 从本节开始,将正式进入到优化方
深度学习的Xavier初始化方法
在tensorflow中,有一个初始化函数:tf.contrib.layers.variance_scaling_initializer。Tensorflow 官网的介绍为: variance_scaling_initializer(factor=2.0,mode='FAN_IN',uniform=False,seed=None,dtype=tf.float32) Returns an
19、Jetson Xavier NX使用yolov5对比GPU模型下的pt、onnx、engine 、 DeepStream 加速性能
基本思想:手中有块Jetson Xavier NX开发板,难得对比一下yolov5在相同模型下,不同形式下的加速性能 一、在ubuntu20.04的基础上,简单做一下对比实验,然后在使用 Jetson Xavier NX进行Deepstream进行目标检测; 预先的环境配置https://blog.csdn.net/sxj731533730/article/details/115230177

Jetson Xavier NX 与笔记本网线连接 ,网络共享,ssh连接到vscode
Jetson Xavier NX 与笔记本网线连接 ,网络共享,ssh连接到vscode Jetson Xavier NX桌面版需要连接显示屏、鼠标和键盘,操作起来并不方便,因此常常需要ssh远程连接到本地笔记本电脑,这里介绍一种连接方式,通过网线与Jetson Xavier NX连接,实现网络共享,远程连接到vscode操作Jetson Xavier NX。 注意:笔记本电脑需要连接WIFI

Jetson Xavier NX刷机安装JetPack 5.1.2,配置CUDA11.4,Tensorrt8.5.2、Opencv4.5.4
文章目录 前言一、准备工作二、配置虚拟机Ubuntu系统(主机已配置可跳过)三、安装NVIDIA SDK管理器四、开始刷机五、设置SSD启动六、安装CUDA环境及其他组件七、重装OpenCV4.5.41.卸载OpenCV库2.安装依赖库3.编译安装OpenCV及OpenCV_contrib 八、安装Pytorch, torchvision,shapely,scipy以及ONNX1.安装Pyt
英伟达官方源Jetson Xavier NX安装Ubuntu20.04,配置CUDA,cuDNN,Pytorch等环境教程(基于NVIDIA官方教程,理论适用其它Jetson设备)
一、准备工作 硬件:Jetson Xavier NX开发板(笔者购入为带128g内存条的EMMC版)、跳线帽(杜邦线)、microUSB转USB数据线、电源线 软件:Ubuntu host主机(可运行Ubuntu的虚拟机/双系统)、NVIDIA SDK MANAGER(下载地址:NVIDIA SDK Manager | NVIDIA Developer)。 在Ubuntu主机里安装sdkmana
Jetson AGX Xavier 正确上手教程
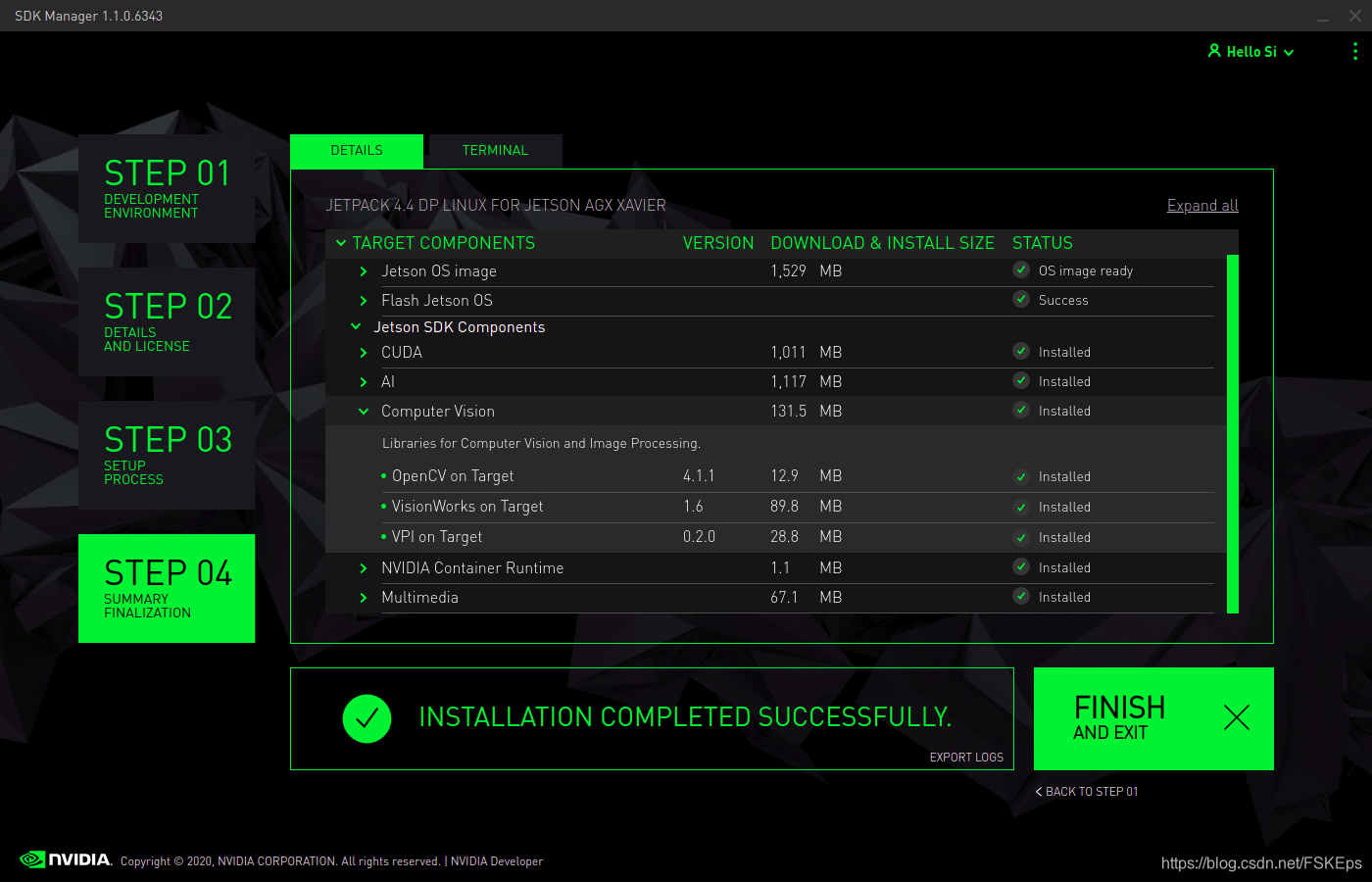
概览 1. 开机1.1 配件1.2 需要准备的器材1.3 连接设备 2. 刷机2.1 更换主机的 apt-get 源2.2 在主机上安装 SDK ManagerStep 1Step 2Step 3烧录 OS 镜像安装 SDK 组件 拿到一个新开箱的 Jetson AGX Xavier 后,首先需要做两件事情: (1)开机,满足基本使用 (2)刷机,满足深度学习相

Jetson Xavier NX 配置(四)—— Python虚拟环境+PyTorch配置
目录 1、虚拟环境Miniforge安装 2、创建新的python虚拟环境 3、安装常用的库 4、安装PyTorch 4.1 PyTorch安装下载 4.2 环境变量配置 4.3 检验PyTorch是否安装成功+CUDA是否可用 5、安装torchvision 1、虚拟环境Miniforge安装 Miniforge相当于我们平常用的Anaconda,此处ARM系统推荐用Mi
nvidia jetson xavier nx developer kit version emmc版重装系统
一、将开发板上的外置硬盘取下来格式化 二、在双系统ubuntu安装SDK Manager(.deb文件) SDK Manager | NVIDIA Developer sudo apt install ./sdkmanager_1.9.2-10884_amd64.deb 报错直接百度错误,执行相应命令即可 三、 运行SDK Manager sdkmanager 短接2,3引脚,用m

Xavier Glorot参数初始化: 理解训练Deep DNN的难点
文章目录 0 先前初始化方法随机初始化权重选择合适的权重初始值 1 深度神经网络2 实验环境和数据集在线学习无限数据集:Shapeset-3 x 2有限数据集实验环境 3 训练过程激活函数和饱和的影响Sigmoid实验Tanh实验Softsign实验 4 研究梯度及其传播损失函数影响梯度传播研究学习过程中的后向传播梯度 5 误差曲线与结论 【Reference】 1. Unders

Linux下I2C调试工具--for--Zynq MPSOC/Jetson Xavier
Linux下I2C调试工具 1、简介 i2c-tools是一个专门调试i2c的工具,无需编写任何代码即可轻松调试I²C设备,可获取挂载的设备及设备地址,还可以在对应的设备指定寄存器设置值或者获取值等功能。i2c-tools有如下几个常用测试命令i2cdetect, i2cdump, i2cget, i2cset,i2ctransfer。 2、i2c-tools工具安装 2.1、Jetson
Deepstream6.0-Jetpark4.6-yolov5-v6.0-tensorRT-Jetson-xavier-nx项目部署环境搭建
1. 开机后,给root用户设置密码: Jetback在4.6版本改动较多,对应的Deepstream也增加了python版本的插件 sudo passwd root Root用户下python3的版本对应的应该是3.6.9 检测python版本: python3 –V 如果需要固定版本,将软连接指向python3.6 输入Python3进入python环境 Import tensorr
tf.contrib.layers.xavier_initializer
xavier_initializer(uniform=True,seed=None,dtype=tf.float32) 该函数返回一个用于初始化权重的初始化程序 “Xavier” 。 这个初始化器是用来保持每一层的梯度大小都差不多相同。 参数: uniform: 使用uniform或者normal分布来随机初始化。 seed: 可以认为是用来生成随机数的seed dtype: 只支持
Jetson AGX XAVIER刷机时提示invalid_request - Authorization flow not allowed
我下的版本是sdkmanager_1.9.2-10899_amd64.deb,安装后后直接在terminal输入 sdkmanager,出来后提示登录有问题,跳到浏览器链接 http://localhost:8080/?error_description=Authorization+flow+not+allowed&state=http://localhost:41369&error=inva

实测 (二)NVIDIA Xavier NX + D435i / 奥比中光Astrapro 相机+ ORB-SLAM 2 + 3 稠密回环建图
开发环境:NX+Ubuntu18.04+ROS-melodic 接着上篇,开始orb-slam2稠密回环建图 二、NX + D435i + ORB-SLAM2 稠密回环建图 先上效果图 这里感谢大神提供一个可回环的稠密地图版本: https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP.git 2.1 安装依赖(和orb-s

AttributeError: module 'torch.nn.init' has no attribute 'xavier_uniform_'
torch0.3 报这个错误 AttributeError: module 'torch.nn.init' has no attribute 'xavier_uniform_' 解决方案 把 xavier_uniform_ 后面的下划线删了
NVIDIA Jetson AGX Xavier 硬盘挂载,扩展 /home 主目录
刷机之后的 Xavier 磁盘空间会被占用一半以上,如果不进行空间扩展,会影响我们后续使用。因此,Xavier 刷机后,首先要进行的重要操作便是硬盘挂载,空间扩展后进行软件数据安装。 目录 1. 查看挂载信息 2. 查看硬盘分区信息 3. 对硬盘进行分区 4. 格式化分区 5. 挂载临时目录 6. 替换系统原 /home 主目录 7. 设置开机自动挂载 8. 重启,完成挂载