unifying专题

【论文学习】Fast Online Object Tracking and Segmentation: A Unifying Approach 在线快速目标跟踪与分割 -论文学习
Fast Online Object Tracking and Segmentation: A Unifying Approach 在线快速目标跟踪与分割:一种通用方法 摘要 论文提出一种实时VOT和半监督VOS的通用方法。 该方法称为SiamMask,通过二值分割任务生成损失,改进了全卷积Siamese 方法的离线训练步骤。 训练完成后,SiamMask 依靠init 单个bbox并在线运行

UniFormer: Unifying Convolution and Self-attention for Visual Recognition
paper链接: https://arxiv.org/abs/2201.09450 UniFormer: Unifying Convolution and Self-attention for Visual Recognition 一、引言二、实现细节(一)、Local MHRA(二)、全局MHR(三)、动态位置嵌入 三、框架设计四、实验(一)、图像分类(二)、视频分类(三)、目标检测(三)

Conditional Likelihood Maximisation: A Unifying Framework for Information Theoretic Feature Selecti2
第三节主要以理论推导为主,主要是为了推导出最大条件似然问题可以近似为最小化条件互信的问题: arg max θ L ( θ , D ) = arg min θ I ( X θ ~ ; Y ∣ X θ ) \arg\max_{\theta}\mathcal{L}(\theta,\mathcal{D})=\arg\min_\theta I(X_{\tilde\theta};Y|X_\

Conditional Likelihood Maximisation: A Unifying Framework for Information Theoretic Feature Selecti
目录 1、文章信息2、主要思想2.1信息熵:2.2 基于互信息的滤波算法 1、文章信息 Title: Conditional Likelihood Maximisation: A Unifying Framework for Information Theoretic Feature Selection Author: Gavin Brown, Adam Pocock, Mi

行人轨迹论文:STUGCN:A Social Spatio-Temporal Unifying Graph Convolutional Network for Trajectory Predictio
STUGCN:A Social Spatio-Temporal Unifying Graph Convolutional Network for Trajectory Prediction用于轨迹预测的社会时空统一图卷积网络 Abstract-动态场景中交互代理的轨迹预测,也称为轨迹预测,是许多应用的关键问题,包括机器人系统和自动驾驶。由于行人之间的复杂交互,该问题提出了重大挑战。为了预测未来的
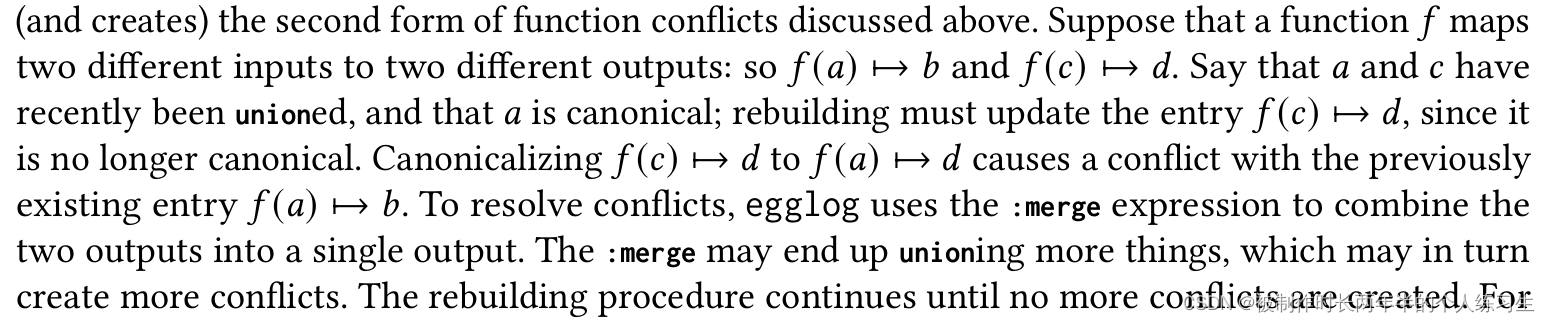
【论文研读】Better Together:Unifying Datalog and Equality Saturation
最近研究ReassociatePass整的头大,翻两篇Datalog的论文看看。 今天看的一篇是比较新的文章,23年4月贴到arxiv上的。 本文的主要贡献是提出了egglog,将Datalog和Eqsat结合起来,继承了Datalog的efficient incremental execution, cooperating analysis and lattice 目录 Introducti

Unifying Voxel-based Representation with Transformer for 3D Object Detection
Paper name Unifying Voxel-based Representation with Transformer for 3D Object Detection Paper Reading Note URL: https://arxiv.org/pdf/2206.00630.pdf TL;DR NIPS 2022 文章,提出了在 voxel 特征空间统一多模态输入的方式(U

Unifying Flow, Stereo and Depth Estimation论文阅读
1. 序言 上篇文章中我们提到了一种在线标定光学防抖主摄和ToF方法。其中使用RAFT作为光流估计网络来进行密集匹配,本文我们来介绍一种更新的光流估计算法GMFlow,其被CVPR2022接收为Oral。同时也将介绍其续作Unimatch,一种整合光流估计,立体匹配和双目深度估计的统一网络。这是一种全新的光流估计范式。 2. 背景 光流描述了两个视频帧像素之间的相对运动,是计算机视觉领域
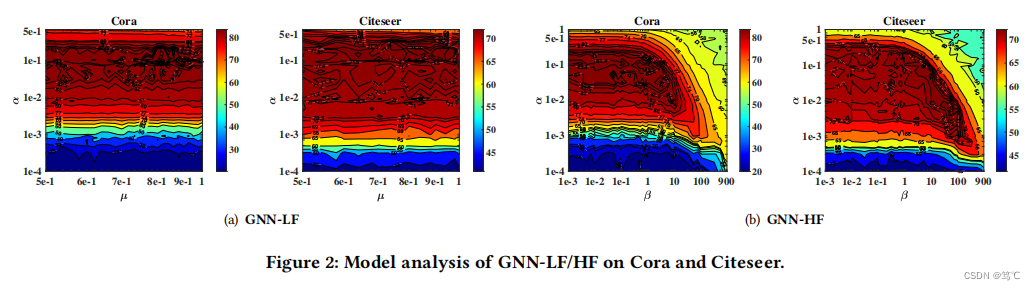
【论文阅读】Interpreting and Unifying Graph Neural Networks with An Optimization Framework
【论文阅读】优化的框架来解释图神经网络(高通、低通滤波)Interpreting and Unifying Graph Neural Networks with An Optimization Framework 文章目录 【论文阅读】优化的框架来解释图神经网络(高通、低通滤波)Interpreting and Unifying Graph Neural Networks with An
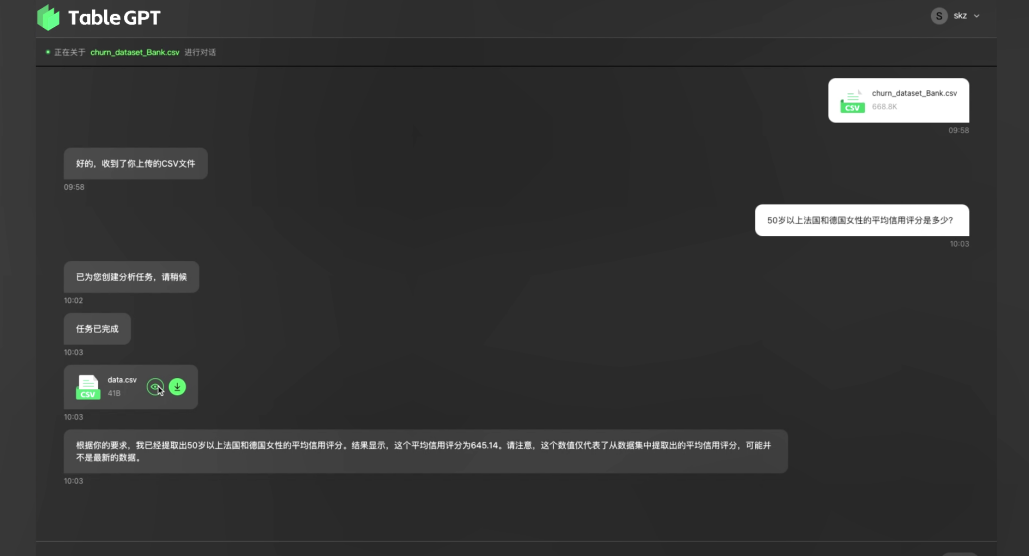
TableGPT: Towards Unifying Tables, Nature Language and Commands into One GPT
论文标题:TableGPT: Towards Unifying Tables, Nature Language and Commands into One GPT 论文地址:https://github.com/ZJU-M3/TableGPT-techreport/blob/main/TableGPT_tech_report.pdf 发表机构:浙江大学 发表时间:2023 本文从摘要,引言
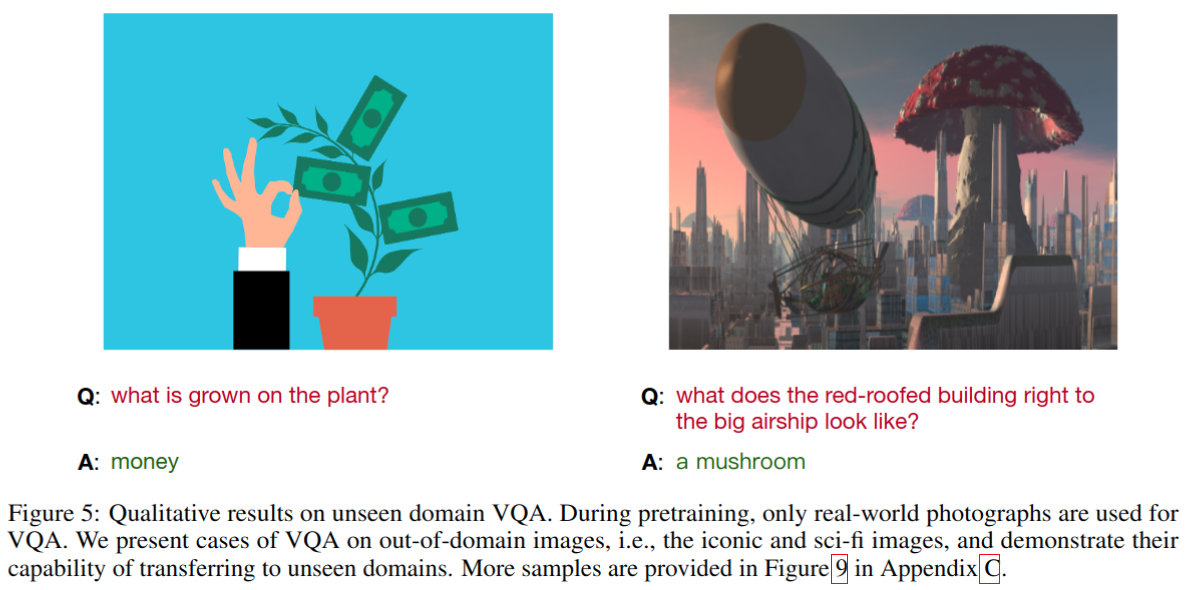
OFA: Unifying Architectures, Tasks, and Modalities Through a Simple Sequence-to-Sequence Learning Fr
Paper name OFA: Unifying Architectures, Tasks, and Modalities Through a Simple Sequence-to-Sequence Learning Framework Paper Reading Note URL: https://proceedings.mlr.press/v162/wang22al/wang22al.p
![UNIFYING DIFFUSION MODELS’ LATENT SPACE, WITHAPPLICATIONS TO CYCLEDIFFUSION AND GUIDANCE [ICCV 2023]](https://img-blog.csdnimg.cn/daf073d0da914379bb1fbe5f7ab0986f.png)
UNIFYING DIFFUSION MODELS’ LATENT SPACE, WITHAPPLICATIONS TO CYCLEDIFFUSION AND GUIDANCE [ICCV 2023]
论文链接https://arxiv.org/abs/2210.05559github链接https://github.com/ChenWu98/cycle-diffusion Abstract Diffusion models have achieved unprecedented performance in generative modeling. The commonly-adopted

【论文阅读】《Unifying Large Language Models and Knowledge Graphs: A Roadmap》
Unifying Large Language Models and Knowledge Graphs: A Roadmap 统一大型语言模型和知识图谱:路线图 Shirui Pan, Senior Member, IEEE, Linhao Luo, Yufei Wang, Chen Chen, Jiapu Wang, Xindong Wu, Fellow, IEEE 潘石瑞,
【论文笔记】Unifying Large Language Models and Knowledge Graphs:A Roadmap
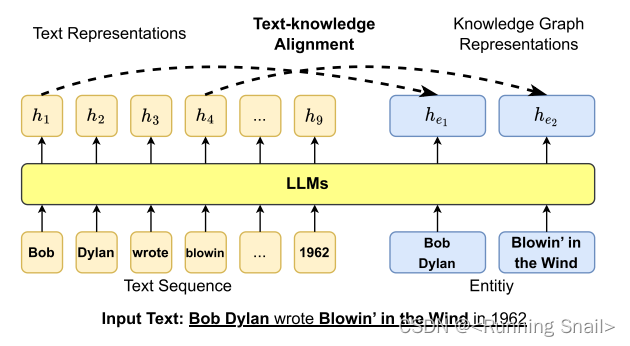
(后续更新完善) 2. KG-ENHANCED LLMS 2.1 KG-enhanced LLM Pre-training 以往将KGs集成到大型语言模型的工作主要分为三个部分:1)将KGs集成到训练目标中,2)将KGs集成到LLM输入中,3)将KGs集成到附加的融合模块中。 2.1.1 Integrating KGs into Training Objective 这一类的研究工作
LLM+KGs综述:Unifying Large Language Models and Knowledeg Graphs: A Roadmap
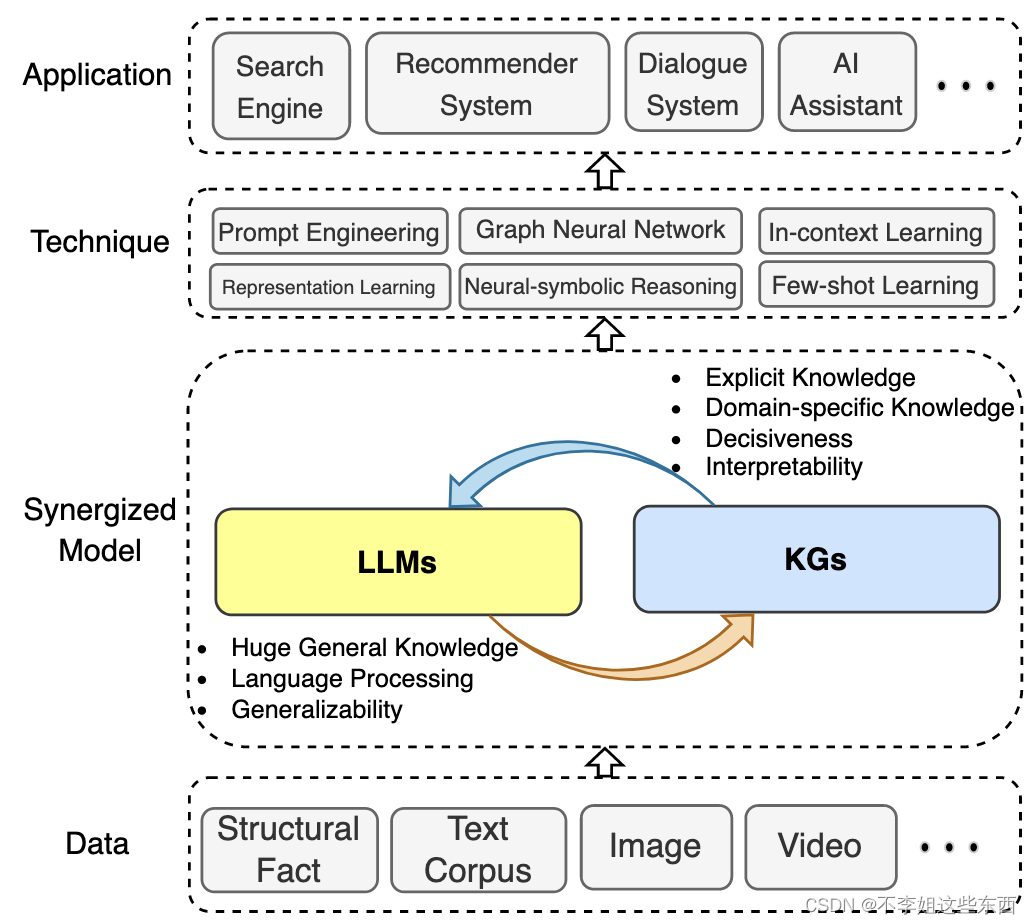
统一大语言模型和知识图谱综述 Unifying Large Language Models and Knowledeg Graphs: A Roadmap githb:https://github.com/zjukg/KG-LLM-Papers 介绍了大语言模型的知识图谱结合的一些东西。 introduction LLM在一些NLP任务上发展很好。最近,模型参数规模的大幅度增加进一步