tof专题

9 自研rgbd相机基于rk3566之qt框架开发tof图像处理线程
qt框架开发tof图像处理线程 tof线程功能及处理流程1 tof线程分为如下几个功能:2 tof线程的处理流程如下: tof线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 tof线程程序示例1 线程头文件:pthread_tof.h2 线程源文件:pthread_tof.cpp tof线程功能及处理流程 1 tof线程分为如下几个功能: 1 v4l2采图部分,将

揭秘VL53L5,意法半导体最新ToF传感器背后的秘密
“在意法半导体宣讲的其他论文中,有一篇探讨了一种无需安装电池或外部电源即可工作的光感设备。此外,这个光传感器还可以收集能量,驱动BLE蓝牙低功耗模块发送数据。这个想法并不新鲜,但该论文使用了市面有售的元器件,使这种光传感器具有商用可行性。为了实现这一个概念,该光传感器采用了将光能转换为电流的光伏换能器。此外,BLE射频仅在信标模式下工作,以节省能源。 ” 作者: 意法半导体博客IEEE Sen

什么是飞行时间传感器以及 ToF 传感器如何工作?
译自https://www.seeedstudio.com/blog/2020/01/08/what-is-a-time-of-flight-sensor-and-how-does-a-tof-sensor-work/ 作者:亿达 您是否听说过飞行时间(也称为 ToF)用于您的手机、相机等,但不知道它们的用途及其工作原理? 通过本指南,您将了解有关 ToF 传感器和相机的所有
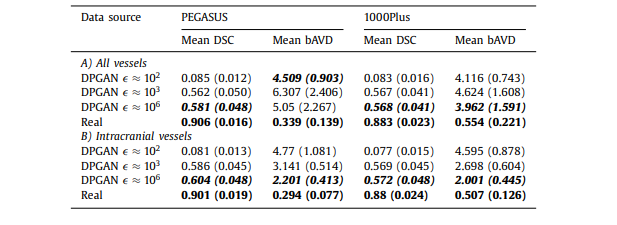
文献速递:GAN医学影像合成--用生成对抗网络生成 3D TOF-MRA 体积和分割标签
文献速递:GAN医学影像合成–用生成对抗网络生成 3D TOF-MRA 体积和分割标签 01 文献速递介绍 深度学习算法在自然图像分析中的成功近年来已被应用于医学成像领域。深度学习方法已被用于自动化各种耗时的手动任务,如医学图像的分割和分类(Greenspan 等,2016年;Lundervold 和 Lundervold,2019年)。特别是,监督式深度学习方法通过将输入图像中的特征映射到

VL53L4CD TOF开发(1)----驱动TOF进行测距
VL53L4CX TOF开发.1--驱动TOF进行测距 概述视频教学样品申请完整代码下载主要特点硬件准备技术规格系统框图应用示意图生成STM32CUBEMX选择MCU串口配置IIC配置 XSHUTX-CUBE-TOF1演示结果 概述 VL53L4CD适用于接近测量和短距离测量,可实现从仅仅1 mm到1300 mm的超精准距离测量。新一代激光发射器具有18°视场 (FoV),提高了

《3D ISP核心技术算法》系列(1)——ToF测量中的多径现象与消除方法
《3D ISP核心技术算法》系列文章是上海数迹智能科技有限公司结合自身多年来在3D ISP技术方向上的积累,推出的系列型科普文章。系列文章将对影响3D成像质量的主要问题逐一进行讲解,深入浅出的介绍问题出现的原理机制和解决方法,旨在促进3D视觉从成像到感知的应用工程实践,真正实现慧视界、智未来。 本篇文章作为该系列的第一篇文章,将对iToF在复杂场景下的最主要环境误差源之一的多径误差进行介绍。
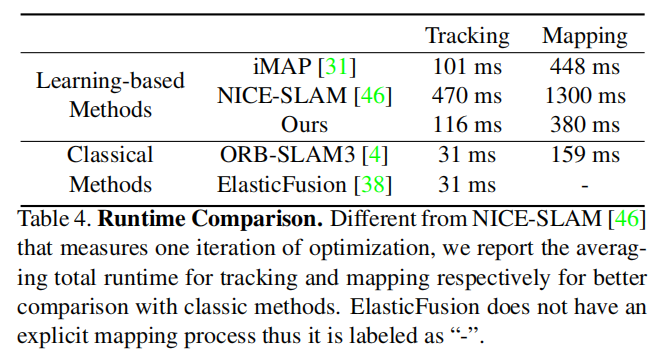
【CVPR2023】使用轻量 ToF 传感器的单目密集SLAM的多模态神经辐射场
目录 导读 本文贡献 本文方法 轻量级ToF传感器的感知原理 多模态隐式场景表示 时间滤波技术 实验 实验结果 消融实验 结论 未来工作 论文标题:Multi-Modal Neural Radiance Field for Monocular Dense SLAM with a Light-Weight ToF Sensor 论文链接:https://ope

Arduino驱动VL53L0X ToF激光测距传感器(距离传感器)
目录 1、传感器特性 2、硬件原理图 3、控制器和传感器连线图 4、驱动程序 VL53L0X激光测距传感器是一款基于意法半导体(STMicroelectronics&#

深度相机—TOF、RGB双目、结构光原理及优势对比
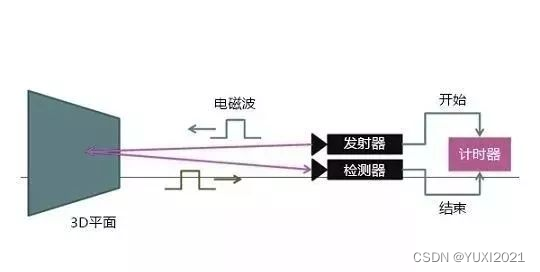
烟台致瑞图像视觉技术2021-03-18 15:14 目前的深度相机根据其工作原理可以分为三种:TOF、RGB双目、结构光。 一、TOF TOF是Time of flight的简写,直译为飞行时间的意思。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。这种技术跟3D激光传感器原理基本类似,只不过3D激光
VL53L5CX驱动开发(1)----驱动TOF进行区域检测
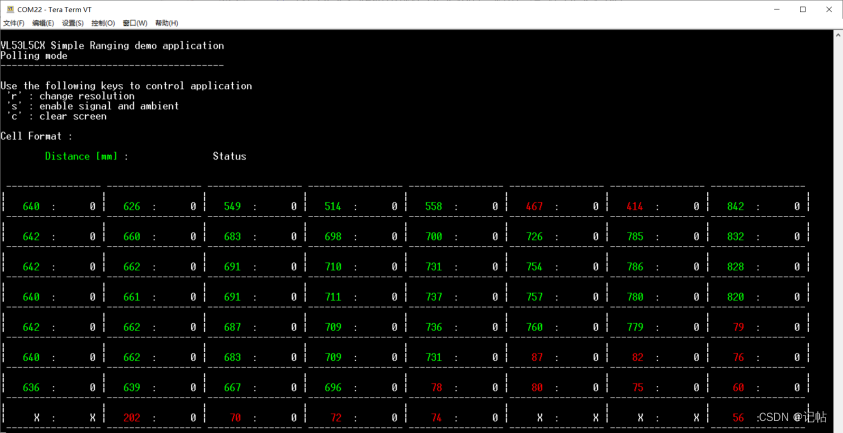
VL53L5CX驱动开发----1.驱动TOF进行区域检测 概述视频教学样品申请源码下载主要特点硬件准备技术规格系统框图应用示意图区域映射生成STM32CUBEMX选择MCU 串口配置IIC配置X-CUBE-TOF1串口重定向代码配置Tera Term配置演示结果 概述 VL53L5CX是一款先进的飞行感应(FlightSense)产品系列的飞行时间(ToF)多区间测距传感器。封

TOF激光雷达告别“技术路线之争”
交流群 | 进“传感器群/滑板底盘群/汽车基础软件群/域控制器群”请扫描文末二维码,添加九章小助手,务必备注交流群名称 + 真实姓名 + 公司 + 职位(不备注无法通过好友验证) 编辑 | 苏清涛 两三年前,在提起激光雷达时,很多人都会有一种“技术路线太多,我傻傻分不清哪个是哪个”的印象。暂不提离量产还有一段距离的FMCW激光雷达,仅以TOF激光雷达中的“半固态/固态”为例,按波长、集成度及
UWB常用的算法——飞行时间 (ToF)
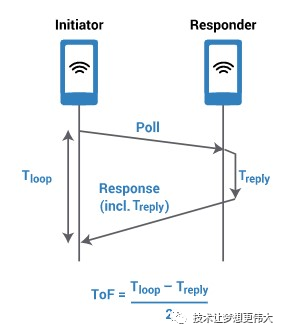
关注、星标公众号,直达精彩内容 来源:技术让梦想更伟大 作者:李肖遥 了解飞行时间 基于恒定的光速,飞行时间 (ToF) 计算使用信号传播时间来确定距离。图 1 基本说明了 ToF 计算如何在配备 UWB 的任何两个设备(例如汽车和遥控钥匙)之间进行。 如何计算超宽带飞行时间如下图: 为了计算 ToF,我们测量了信号从 Initiator 到 Responder 再回到 Initia
TOF-SIMS分析
TOF-SIMS explorer 链接:https://pan.baidu.com/s/1BrbQMin598LltyxC92GeRQ?pwd=s8e1 提取码:s8e1 选择元素 nominal 1=H, 12=C, nominalelement1H12C14N16O19F28Si32S 绘制profile 导出数据

间接ToF的距离计算
原文链接: https://www.computationalimaging.cn/2018/10/tof_28.html 间接飞行时间技术的工作原理是使用调制光照射场景, 并测量通过场景中的物体反射后返回光的相位延迟。 得到相位延迟后, 再使用正交采样技术测量并转换为距离。 这样做的好处是 由于所需的计算量小,占用空间小且成本相对较低,故该技术具有高帧速率。 可是, 为什么通过相位延迟就
TOF摄像机视频中的运动分割(MOTION SEGMENTATION IN VIDEOS FROM TIME OF FLIGHT CAMERAS)
摘要: 本文研究了深度摄像机视频序列中独立运动物体的运动估计和分割问题。具体地,我们提出了一种基于距离流和光流约束方程融合的运动估计算法。流场用于推导长期点轨迹。分割技术根据运动和深度相似性将轨迹分组为时空对象。我们展示了用飞行时间摄影机拍摄的真实场景的结果。 1.介绍: 本文分析了飞行时间(TOF)摄像机拍摄的视频序列中的短期和长期运动。我们通过综合距离流和光流来估计视频中两

柯泰测试同步采集软件,泰克合作伙伴柯泰发布:基于TOF技术的3D传感VCSEL阵列测试方案...
原标题:泰克合作伙伴柯泰发布:基于TOF技术的3D传感VCSEL阵列测试方案 什么是3D传感的TOF技术? TOF传感器测量光在某介质中行进一段距离所需的时间。通常,这是对脉冲发射光到达物体并反射回到TOF传感器所用时间的测量。TOF摄像头则利用TOF测量原理(TOF图像传感器)来确定摄像头与物体或周围环境之间距离,并通过测量的点生成深度图像或3D图像。 什么是无源VCSEL阵列? 无源VCS
【3D深度视觉-TOF(Time-of-Flight)3D 技术——学习笔记】
TOF(Time-of-Flight)3D 技术是一种测量距离的技术,通过测量光脉冲从光源发射到物体表面后返回的时间来计算距离。这种技术在许多领域都有应用,如计算机视觉、机器人导航和工业检测等。以下是 TOF 3D 技术的简要总结: 原理:TOF 3D 技术基于光的传播速度以及光在穿过透明或半透明物体时的速度变化。通过测量从光源发出的光脉冲返回所需的时间,可以计算出物体与光源之间的距离。
TOF、RGB双目、结构光优劣分析
转自:https://blog.csdn.net/qq_37764129/article/details/81011221 目前的深度相机根据其工作原理可以分为三种:TOF、RGB双目、结构光 一、RGB双目 RGB双目相机因为非常依赖纯图像特征匹配,所以在光照较暗或者过度曝光的情况下效果都非常差,另外如果被测场景本身缺乏纹理,也很难进行特征提取和匹配。你看看下面的图就懂了。

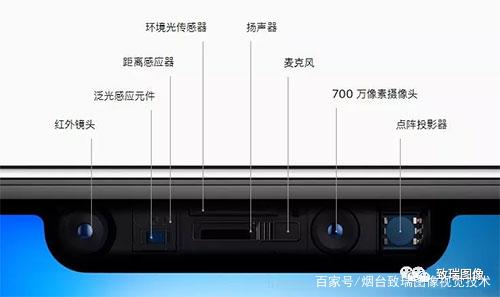
人脸识别是怎么做到的?看懂TOF与结构光的区别
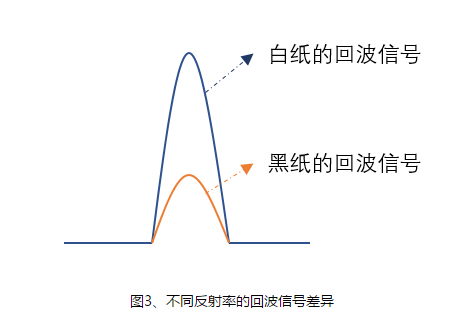
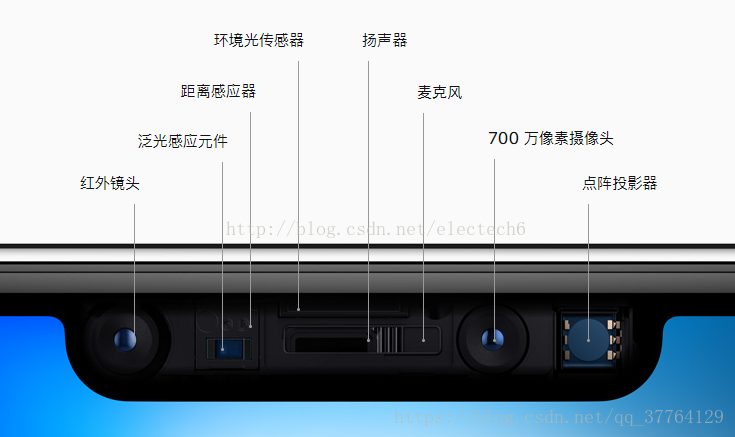
去年9月份苹果推出了iPhone 11、iPhone 11 Pro和iPhone 11 Pro Max三款新iPhone,新机型的性能在拍照和续航上得到大幅度的提升,同时连续三年依旧延续保留FACE ID功能。在人脸识别竞争激烈市场中,结构光与TOF两种主流解决方案为各大厂商所受用,为何苹果一直钟情于3D结构光,其背后的秘密是什么呢? 从平面到立体的秘密 结构光3D视觉技术中的其中一种,用于获

英飞凌传感器研讨会雷达与TOF
英飞凌(infineon)的技术研讨会,其中的一场专门介绍了毫米波雷达的应用与智能感知,清华大学 李刚教授做的报告水平很高同时指出了当前的主要应用研究方向。 雷达人体姿态识别-shobha sundar ram 美国,主要涉及雷达信号的模式识别:运动姿态、爬行、跌倒等;举例在跌倒检测中主要依据大数据中的异常检测,但同时信号的角度差异、完备的数据库、虚警等问题仍然值得关注;雷达手