本文主要是介绍TOF测距基础,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
TOF 雷达的实现难点主要在于:
1.首先是计时问题。在TOF 方案中,距离测量依赖于时间的测量。但是光速太快了,因此要获得精确的距离,对计时系统的要求也就变得很高。一个数据是,激光雷达要测量1cm 的距离,对应的时间跨度约为65ps。稍微熟悉电气特性的同学应该就知道这背后对电路系统意味着什么。
2.其次是脉冲信号的处理。这里面又分两个部分:
a) 一个是激光的:三角雷达里对激光器驱动几乎没什么要求,因为测量依赖的激光回波的位置,所以只需要一个连续光出射就可以了。但是TOF 却不行,不光要脉冲激光,而且质量还不能太差,目前TOF 雷达的出射光脉宽都在几纳秒左右,上升沿更是要求越快越好,因此每家产品的激光驱动方案也是有高低之分的。
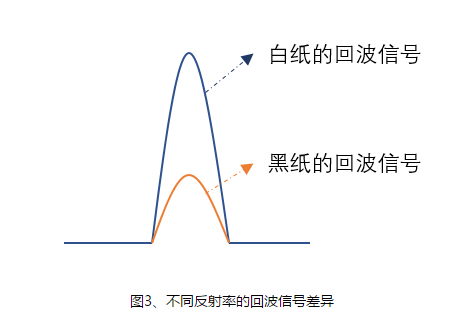
b) 另一个是接收器的。一般来说回波时刻鉴别其实是对上升沿的时间鉴别,因此在对回波信号处理时,必须保证信号尽量不要失真。另外,即便信号没有失真,由于回波信号不可能是一个理想的方波,因此在同一距离下对不同物体的测量也会导致前沿的变动。比如对同一位置的白纸和黑纸的测量,可能得到如下图的两个回波信号,而时间测量系统必须测出这两个前沿是同一时刻的(因为距离是同一距离),这就需要特别的处理。
除此以外,接收端还面临着信号饱和、底噪处理等等问题,可以说困难重重。
这篇关于TOF测距基础的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








