本文主要是介绍【3D深度视觉-TOF(Time-of-Flight)3D 技术——学习笔记】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

TOF(Time-of-Flight)3D 技术是一种测量距离的技术,通过测量光脉冲从光源发射到物体表面后返回的时间来计算距离。这种技术在许多领域都有应用,如计算机视觉、机器人导航和工业检测等。以下是 TOF 3D 技术的简要总结:
-
原理:TOF 3D 技术基于光的传播速度以及光在穿过透明或半透明物体时的速度变化。通过测量从光源发出的光脉冲返回所需的时间,可以计算出物体与光源之间的距离。
-
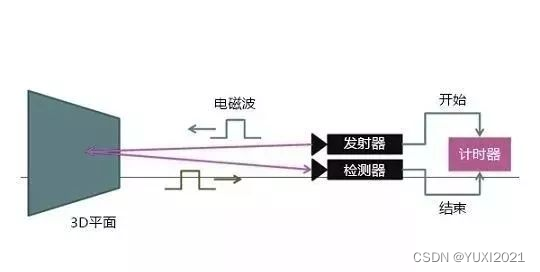
设备:TOF 3D 系统通常包括一个发射器(也称为“发送器”或“光源”)和一个接收器(也称为“接收器”或“传感器”)。发射器发出一束短脉冲光,然后测量从物体表面反射回来的光脉冲所需的时间。根据光速和传播时间的关系,可以计算出物体与发射器之间的距离。
-
优点:TOF 3D 技术具有高精度、高分辨率和实时性的优点。它可以在各种环境条件下工作,如低光照、多光谱和复杂背景等。此外,TOF 3D 技术不需要接触物体,因此适用于非接触式测量。
-
局限性:TOF 3D 技术的主要局限性在于对光线传播路径的依赖性。例如,当光线遇到障碍物或被吸收时,测量结果可能会受到影响。此外,TOF 3D 技术对于远距离测量可能存在一定误差。
总之,TOF 3D 技术是一种高精度、实时性强的三维距离测量方法,广泛应用于各种领域。然而,它仍然面临一些局限性,需要在实际应用中加以考虑。
这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。
有关 TOF 3D 的基本原理:,首先通过红外光源,打出超短的脉冲信号,形态是面光,要求覆盖整个视场范围,然后通过红外相机接收反射信号,在成像的同时也获得了空间内每个点收发信号的时间差,最后通过光速计算出距离,就能搞定视场内整个空间的 3D 轮廓。
参考资料:https://mp.weixin.qq.com/s/8sHbOF4ncUa80GABmG75iA
这篇关于【3D深度视觉-TOF(Time-of-Flight)3D 技术——学习笔记】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



